

海为N型PLC,对丝杠长时间工作后的精度和重复性验证设计
工业控制
描述
一、测试背景
为某项目验证丝杠长时间工作后的精度和重复性,利用海为N型PLC给步进驱动器连续发送脉冲从而控制步进电机使丝杠做往复直线运动。持续工作一周后,进行运动精度和重复性数据比较。当然N系列的PLC还可以做简单地直线插补运动和圆弧插补运动,在这里没有应用,以后有机会可进行测试。
二、硬件配置
控制器采用海为N系列运动型CPU型号为N16S2T,该CPU提供4路200KHz的高速脉冲输入和4路200KHz的高速脉冲输出,CPU为步进驱动器提供脉冲控制输出。24V电源为步进驱动器和CPU输出提供电源,CPU的输入点可用CPU自身提供的24V电源提供工作电源。另外,为简单的测试任务配置三个自复位式按钮,分别用于系统启动,系统停止,系统回零功能。
具体的控制要求如下:
1、当系统在电气零点的情况下,按下系统启动按钮方可运行该系统,运行系统后丝杠上的滑块会按照丝杠的形成做持续的往复运动。
2、当系统在运行状态下,或者回零状态下,按下系统停止按钮,CPU都将停止脉冲输出,电机停止旋转。
3、当系统上电时,必须首先进行系统回零,系统启动按钮无效。
三、程序设计
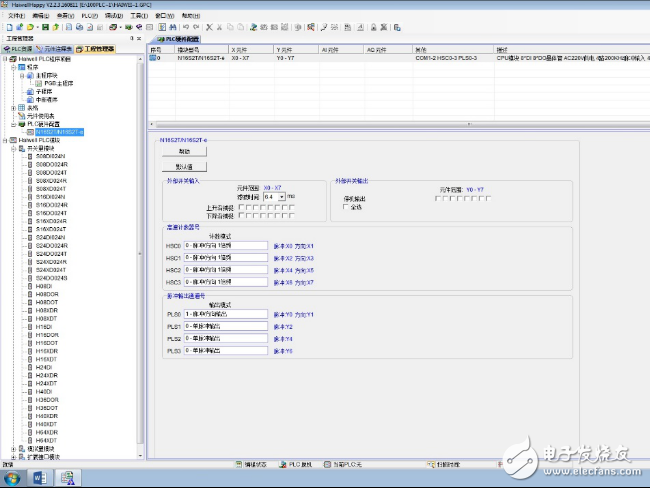
1、利用海为编程软件,首先为工程进行硬件配置如图,设置PLS0通道为1。
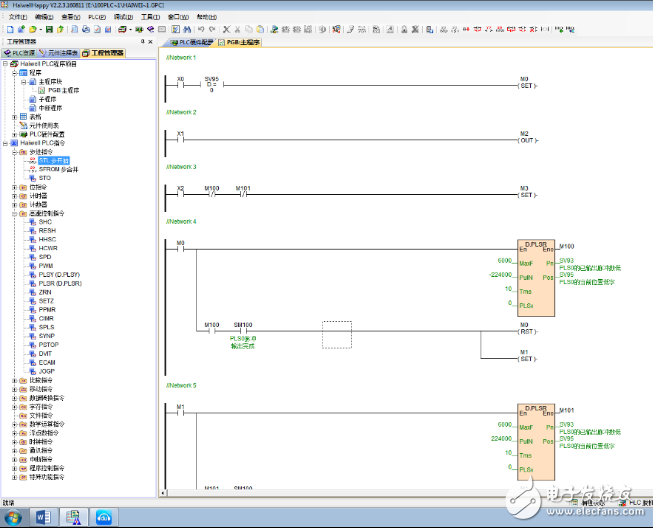
2、点击主程序块建立主程序,由于程序量小因此直接在主程序中进行编程。该测试任务中,利用到的功能块主要是D.PLSR(加减速脉冲输出功能块),PSTOP(脉冲停止输出功能块),ZRN(原点回归功能块)和SETZ(设置电气零点功能块)。部分程序如下图:
四、系统调试和运行
1、离线调试,利用HaiweiHappy软件自带的离线调试功能进行离线程序测试,检查逻辑控制关系。
2、联机调试,将通讯电缆将CPU模块和计算机通过串口相连,进行联机调试,观察设备运转情况,进一步检查逻辑控制功能,以及调整脉冲输出的脉冲数和脉冲频率和加减速时间等参数。
3、系统运行。
五、测试结论
通过对丝杠的运动距离的重复多次测量。可以证明海为N系列N16S2T这款CPU在常规环境下,长时间工作时设备的稳定性和重复性是有保证的。
六、使用心得
第一次使用海为PLC,感谢海为工作人员为我申请了一个N型的PLC,首先拿到产品的时候包装外观还是很规矩的。硬件方面不管是接线还是接口配置,在国产品牌中算是中规中矩。但是个人感觉海为的编程软件还是有很多亮点:
1、软件上手很快,双击打开后只需要新建项目,系统就会提示你下一步需要做哪些工作而且都是即时显示,让你的工程IO点,存储区等配置一目了然。
2、在写程序时,调用功能块时,比如在调用D.PLSR时,会自动填写相应功能的系统寄存器,如下图。不需要再去查手册然后手动填写。
3、调试功能分为脱机调试和联机调试不用再安装其他软件,操作一目了然基本不用看手册,直接就知道怎么操作非常简便。
总体来说,Haiwell PLC初次使用的总体感觉是,上手快,查找资料效率高,所有的关键点都在帮助文档的目录中一目了然,功能块功能丰富,串口的自由口通讯成为基本配置,可提高设备集成性,如一些厂家自己协议的设备可以不用第三方设备进行协议转换。最后对于运动控制有一点看法,在进行运动控制编程时,如果在编程界面中有一个是设置运动参数的界面,比如设置参数电机旋转一圈的脉冲数,电机旋转一圈实际物体前进多少mm,启动速度、加减速速度设定,加加减速度等参数的设置。然后通过这些设置的数据,在主程序编程时,直接调用真正的运动控制功能块,这些功能块只需要填写需要走的距离,运动速度,在状态侧直接显示当前的位置,而不是输入脉冲数,脉冲频率等参数。这个功能有点类似西门子的200smart的CPU,当然也可以将这个思路运用到PID控制。一点拙见说的不对的地方多见谅。
-
测量系统分析:测量系统的的重复性和重现性2009-08-16 0
-
贴装重复精度简述2018-09-05 0
-
PGA-SAR系统无法达到12比特级别的可重复性时,Δ-Σ系统会怎么样呢?2021-04-07 0
-
测量系统的的重复性和重现性2009-08-16 1049
-
相控阵探头的重复性与可靠性2010-03-20 497
-
并行传感器如何提高倾斜测量的精度和可重复性2018-07-11 3109
-
海为N16S2T验证丝杠长时间工作后的精度和重复性2017-10-06 517
-
为什么水分测定仪的测定结果重复性差?以及哪些样品不适合测量2020-03-29 2652
-
机器人技术的可重复性和准确性分析2020-09-17 2325
-
计量标准重复性的测量方法2020-11-12 17156
-
计量标准的重复性考核要求2022-03-18 2449
-
在Verilog中利用函数将重复性的行为级设计进行提取2023-06-02 849
-
如何验证白光干涉仪精度丨科普篇2023-04-07 416
-
PySnooper:替代print的重复性工作2023-10-30 181
全部0条评论

快来发表一下你的评论吧 !
