

汽车自适应巡航系统的多性能指标控制算法
电子说
描述
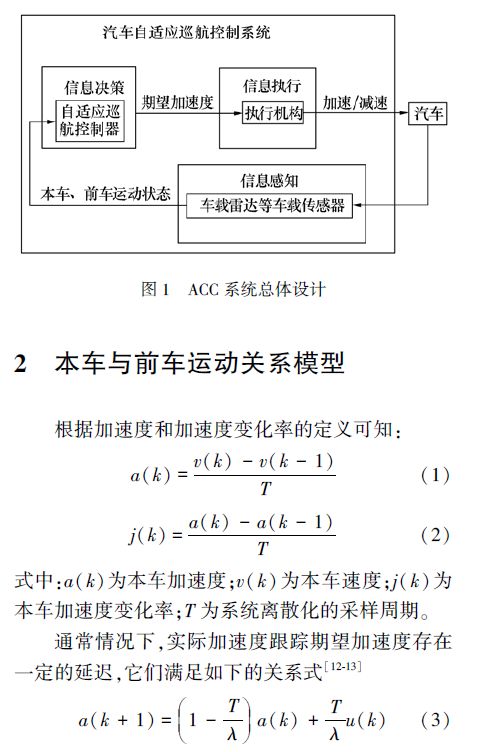
汽车自适应巡航控制(Adaptive cruise control ,ACC)系统是汽车驾驶辅助系统的重要组成部分,其作用是根据车载雷达等车载传感器探测本车的运动状态与其行驶车道上前方有效目标的运动状态,并考虑到汽车自身加速和减速能力、安全性、舒适性及快速性等多方面因素,建立的以保持安全车间距为目标,以本车与行驶车道内的前方目标的相对运动状态为输入,以本车期望纵向加速度为输出的系统控制器,并通过执行机构控制本车加速和减速,促使本车以期望车间距精确的跟随前车[1]。
近年来,随着技术的发展,人们对汽车安全性、舒适性、快速性等多个相互关联且存在一定矛盾的性能指标提出了新的要求[2-3],怎么协调这些性能指标成为ACC系统设计的关键问题,研究人员相继提出了基于PID控制[4-5]、滑模控制[7]、最优控制[8]以及模型预测控制[9-10](Model predictive control,MPC)等控制理论的ACC系统控制策略。如文献[8]利用最优控制理论将引入前车加速度的前车跟随误差模型转化为线性二次型调节器问题,并定义前车跟随误差模型的无限时间离散二次型目标函数以协调多个性能指标,但其解为了简化运算忽略了前车加速度的影响,导致本车跟随前车时误差较大。文献[9]在模型预测控制的框架下,将汽车自适应巡航控制算法设计转化为带约束的在线二次优化问题,虽然其仿真结果良好,但是其求解依赖于MATLAB优化工具箱的二次规划求解器,并且过程比较复杂,很难将其嵌入到实车控制器中。
为此,本文在文献中关于ACC系统的纵向动力学模型的基础上,引入约束函数,并且在模型预测控制的框架下,以系统的输出(间距差、相对速度、本车实际加速度)的加权平方和作为协调多性能指标的目标函数,接着将含有多个变量的目标函数转化为含有一个未知变量的一维极值问题,并运用MATLAB的fminbnd函数对目标函数进行求解,实现了ACC系统多性能指标的协调控制。最后通过仿真,验证了算法对协调汽车多性能指标(安全性、舒适性和快速性)的可行性。
-
基于粒子群算法的自适应LMS滤波器设计及可重构硬件实现2010-04-26 0
-
电性能指标测试2012-08-17 0
-
系统时间响应的性能指标2017-10-12 0
-
计算机控制系统的性能指标有哪些2021-10-25 0
-
基于二次型性能指标学习算法的温度控制2009-12-08 484
-
频率响应法-- 频域性能指标和时域性能指标的关系2009-07-27 10802
-
什么是汽车自适应巡航控制系统2010-03-17 3717
-
比较器的性能指标/分类/应用2010-03-22 1753
-
检测系统的性能指标2011-03-13 896
-
硬盘性能指标概述2012-05-03 5042
-
动态性能指标定义2016-12-30 992
-
数控机床的规格和性能指标2019-05-30 9928
-
控制系统性能指标与PID控制律2021-04-21 636
-
电缆性能指标测试方法2021-06-22 708
-
通信系统的主要性能指标2023-05-08 5624
全部0条评论

快来发表一下你的评论吧 !
