

关于位置式PID控制系统结构分析
描述
连续控制系统中的PID控制规律是:

其中,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,u0是边差为O时的控制作用,是控制量的基准,如原始阀门开度、基准电压等。
在控制中,计算机只能根据采样时刻的偏差值计算控制量,因此上式中的积分和微分项都不能直接使用,需要进行离散化处理。即将描述连续系统的微分方程代之以等效的描述离散系统的差分方程,得到相应的数字PID调节器。
连续时间r用一系列的采样时刻点盯代替,采用矩形法进行数值积分,以求和代替积分,以差分代替微分,得到相应的离散PD表达式。为书写方便,将e(k)简化成e(k)得到位置式算式:

k:采样信号,k=0,1.2。
u(k):第庀次采样时刻的计算机输出值。
e(k):第庀次采样时刻输入的偏差值。
e(k-1):第(k-1)次采样时刻输入的偏差值。
Ti;:积分时间常数。
Td:微分时间常数。
位置式PID控制系统结构图如图所示。
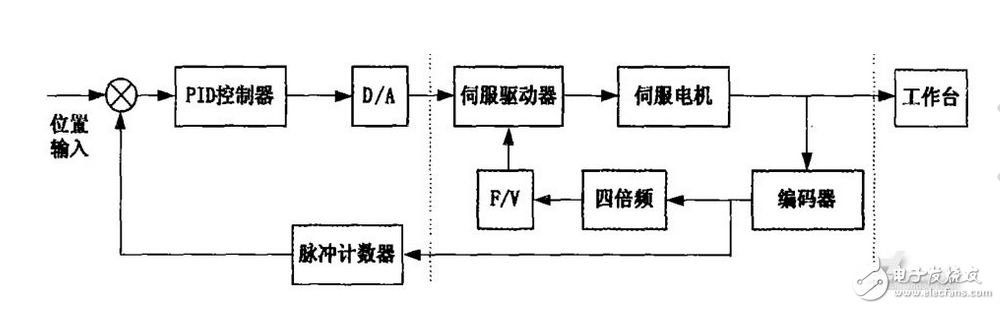
图 位置式PID控制系统
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
浅析位置式PID与增量式PID算法2016-01-15 0
-
用LaBVIEW实现步进电机PID控制系统2019-04-09 0
-
基于NI DAQ和LabVIEW的PID控制系统2019-05-14 0
-
教你用C语言实现位置式PID和增量式PID2019-05-30 0
-
位置式PID与增量式PID的区别在哪?2021-07-13 0
-
PID控制器的作用到底是什么2021-09-07 0
-
步进式PID控制算法2021-09-07 0
-
PID的串级控制来控制电机2022-01-10 0
-
位置式PID与增量式PID简介2022-01-20 0
-
常用的PID控制系统技术及仿真2010-04-28 499
-
基于DSP NNC-PID的电液位置伺服控制系统设计2010-07-10 491
-
模糊PID控制系统的研究2016-04-05 529
-
基于增量式PID算法的帆板控制系统的设计张存吉2017-03-15 966
-
基于PID分段式温度控制系统的设计2017-07-10 1513
-
模糊PID网络控制系统有什么作用详细的仿真分析资料概述2018-12-27 1053
全部0条评论

快来发表一下你的评论吧 !
