

骨关节角度数字化测量与功能评估系统
电子说
描述
摘要:
为了实现对骨关节空间角度的数字化测量与功能客观评价,建立了骨关节角度数字化测量与功能评估系统。对该系统所采用的骨关节空间角度测量、功能评估算法进行研究。首先,根据Kinect数据采集原理及空间向量计算方法介绍了骨关节空间角度测量算法,即在Kinect深度数据流基础上将骨关节点空间位置信息转换为对应的三维空间坐标,根据空间向量夹角公式计算骨关节空间角度。然后,在分析比较分类评价方法的性能基础上,说明了采用K-means聚类方法进行骨关节功能评估的算法。实验结果表明,系统可以为用户提供骨关节的数字化测量与功能评估结果,评估指标purity、RI与F-meaures等能稳定在0.8及其以上,基本满足骨关节功能评价的非接触、客观高效、适应能力强、准确度高、操作简便和成本低等要求。
❖
0 引言
目前有关骨关节疾病的诊断与功能评估大都基于医生临床查体、医学影像成像技术,通过分析MRI、CT、X线检查结果,根据经验对病情做出大致判断与分析,制定相应救治方案,并以此作为后期康复指导的依据,总体来说以医生的主观判断与评价为基础,缺乏对病人客观、精确的功能参数分析[1]。另外,现有医学影像设备有辐射且价格相对昂贵,不适合长期康复治疗的效果评估与药物指导。
近年,3D实感摄像设备在国内外发展很快,其中Kinect作为一款具有视觉和深度信息采集的图像声音传感器,可以通过跟踪定位人体20个主要关节点的位置深度信息而实现人体三维骨架的构建[2-3],将它们应用在骨关节疾患的运动功能监测中,可为医务人员在诊断、治疗方案确立、治疗前后功能对比评价以及康复指导等过程提供一种更客观有效的依据[4-5]。
本文将Kinect应用于骨关节空间角度的实时测量之中建立了骨关节空间角度数字化评估系统,并讨论了测量中的骨关节空间角度测量、功能分类评估等关键算法。实验证明3D实感摄像技术应用于骨关节空间角度测量与功能评估领域,在保证数字化测量要求的同时,可使系统具有客观功能评价、非接触、适应能力强、快速高效、准确、操作简便和成本低等特点。
1 系统构成及其工作原理
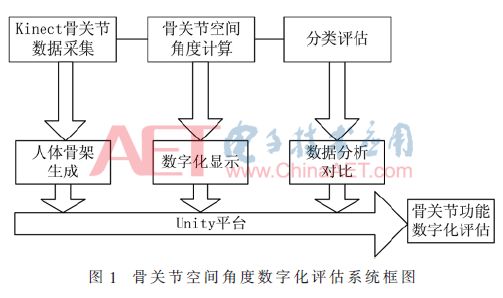
图1为骨关节空间角度数字化评估系统框图,主要由Kinect骨关节数据采集、骨关节空间角度计算、骨关节功能分类评估等组成。系统基于Unity开发平台,利用体感设备Kinect进行深度数据采集;实时计算关节点空间角度并以数字化方式在界面上显示;同时通过数据分析与对比,完成骨关节空间角度数字化评估工作。
2 系统实现
2.1 Kinect骨关节数据采集
基于Kinect的骨关节数据采集过程包括人物控制与骨骼点的绑定、骨架系统生成及关节点坐标表示。
2.1.1 人物控制与骨骼点的绑定
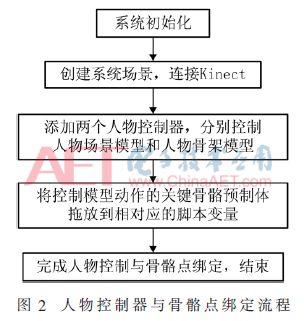
为了控制系统场景中人物角色的移动,需要添加两个人物控制器分别对应于人物场景模型和人物骨架模型。其中,人物场景模型由一系列分别代表头部、肩部、手等人体部位的20个关节点组成。人物骨架模型对应Kinect控制的模型,控制场景中的角色的移动。
将骨架模型中控制动作的关键预制体拖放于相对应的脚本变量上,即可完成人物控制与骨骼点的绑定。人物控制器与骨骼点绑定具体实现流程如图2所示。
2.1.2 骨架系统生成及关节点坐标表示
通过人物控制与骨骼点的绑定,可实现模型与人物的同步,也可以间接地获取关节点的三维坐标。识别出20个关节点位置,可以生成相应的骨架系统。
关节点的三维坐标获取方式采用场景物体获取函数GameObject.Find(),将Kinect空间位置信息转换为三维坐标信息。
2.2 骨关节空间角度计算
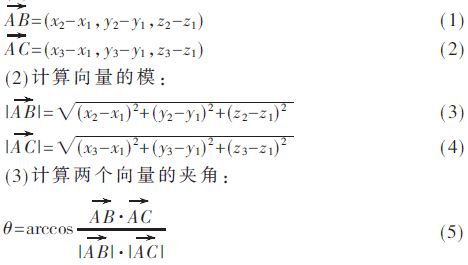
骨关节空间角度的计算是依据获取的关节点三维坐标,根据空间向量夹角公式进行计算。如图3所示,假设A、B、C分别代表3个相邻关节点的空间坐标,以计算关节点A的空间角度为例,具体操作步骤如下:
(1)计算A与相邻两点B、C组成的空间向量:
2.3 骨关节功能分类评估
功能分类算法很多,常用的如K-medoids[6]、CLARANS[7]、K-means[8]等。考虑到骨关节功能庞大的数据量,系统采用更适合大数据集分析的K-means聚类算法,首先对正常的骨关节数据进行分析,得出标准的数据范围[9],再以正常的数据范围为分析比对的标准,对不同关节状况的骨关节角度数据进行收集整理。
其中,K-means算法以距离为分类的标准,根据某个距离函数完成分类,本系统以欧式距离为距离准则函数,完成整体数据的聚类。在此过程中,每次分类都将重新确定一次聚类中心,其新的聚类中心使用取样本均值的方法进行计算,具体如式(6)所示:
式中,zj表示当前类别j的均值结果,n表示类别的样本数量,xi表示类别j的某一样本数值。
系统采用误差平方和作为目标函数,即误差准则函数,具体定义如式(7)所示:
式中,E表示对应类别的误差平方和;k为聚类类别数;n表示类别j的样本数量;xi表示类别j的某一样本数值;zj表示类别j的均值结果;d为数据xi和zj的偏差平方和,即(xi-zj)2值。最后将k个类别的误差平方和相加即为总体误差平方和E。
聚类效果评估采用purity、RI与F-meaures[10]等指标,其中purity是计算正确聚类的样本数占总样本数的比例,RI是指度量正确的百分比,而F-measure由Precision(查准率)和Recall(查全率)两个指标组合而。假设Fi为每个分类的F-measure值,Pi为每个分类的查准率,Ri为每个分类的查全率,则Fi的计算公式如式(8)所示。
总的F值由每个分类Fi的加权平均得到。
3 系统实验与结果
3.1 数据测试与分析
利用骨关节空间角度测量方法,实测66例健康骨关节角度数据。通过对骨关节活动状态的分析,确定正常人群关节角度屈伸范围,如表1所示。它们可以作为后期正常样本的功能分类标准。

在66例健康骨关节屈伸数据分析基础上,增加测试数据至152例,通过聚类程序分析这152例数据。图4所示为以左膝关节为代表的聚类结果,其中横轴为伸展角度,纵轴为屈曲角度,数据被分为三类,分别是正常的一类、屈伸角度不足的一类、伸展角度不足的一类。
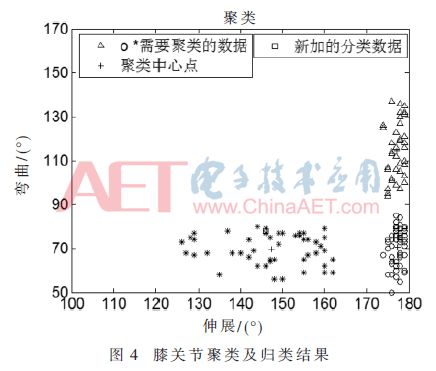
添加需要归类的新样本数据,会在分类基础上进行归类判定,如图4中以“□”号表示参与归类的新的测量数据。
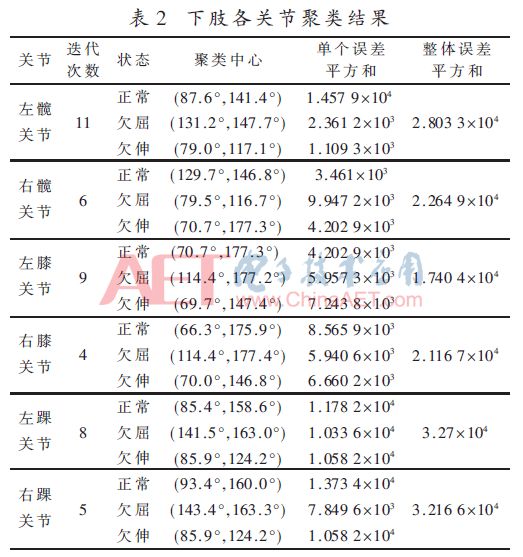
以相同方式,利用上述K-means聚类算法可以完成其他下肢关节样本数据的聚类分析。表2记录了人体下肢各关节角度数据的具体分类情况,包括各关节类别,聚类过程中的迭代次数、状态、聚类中心、单个误差平方和以及整体误差平方和。其中单个误差平方和可以反映每一个聚类结果的差异性,整体误差平方和可以判断不同聚类结果的样本差异。
3.2 功能分类算法验证
对下肢每一个关节测试并记录正常、欠屈和欠伸3种情况下各10组数据,一共30组数据,在聚类结果数据中输入测试的数据,完成对数据的归类,验证测试结果如表3所示。
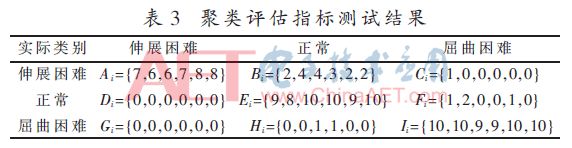
表3中Ai~Ii分别为各个关节角度数据的测试结果情况,其中i={1,2,3,4,5,6}分别对应了左髋关节、右髋关节、左膝关节、右膝关节、左踝关节、右踝关节的数据测试结果,如A1~I1代表的是左髋关节的数据测试结果。结果表明10个伸展困难的样本中,有7个被正确归类,2个被错误地归类到正常,1个被错误地归类到屈曲困难;10个正常的测试样本中,有9个被正确归类,1个被错误地归类到屈曲困难;10个屈曲困难的测试样本完全正确归类于屈曲困难类。
结合聚类评估原理之中涉及的计算方法,可以计算相应关节的聚类指标,各关节聚类评估指标结果如表4所示。
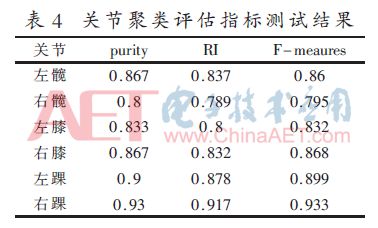
由表4可知,利用K-means聚类算法能较好地完成骨关节空间角度数据的聚类和样本归类,以左髋关节数据的聚类分析和指标计算为例,3个聚类指标的值分别为0.867、0.837、0.86,即该关节数据的聚类准确度稳定在0.83以上。就整个系统来而言,所有关节聚类评估准确度能稳定在0.8及其以上。
3.3 系统测试
系统最终以Unity为开发平台,运用C#编程方式,连接Kinect,实时采集数据并进行骨关节功能评估,图5所示为系统测试界面图。
图5所示的系统测试结果图中包括Kinect图像实时采集与显示,以及下肢左右髋关节、膝关节、踝关节空间角度显示与功能评估等部分。系统能够实时获取关节点之间的角度并进行最大屈伸数据的更新记录,适用于多种参数的系统聚类,且可视化强,能够非接触地完成骨关节空间角度功能的数字化评估。
4 结论
本文研究了一种非接触的骨关节空间角度测量方法,并介绍了骨关节空间角度数字化评估系统的结构和工作原理。实验结果证明:系统以可视化方式为用户呈现骨关节功能的数字化分析与功能评估结果;聚类评估指标purity、RI与F-meaures等能稳定在0.8及其以上,基本满足骨关节空间角度数字化评估要求,可以为医务人员在诊断、治疗方案确立、治疗前后功能对比评价以及康复指导等过程提供一种更客观有效的依据。
-
单片机在数字化脉冲周期监测装置中的应用2011-03-04 0
-
USB数字化仪/示波器2017-08-01 0
-
USB数字化仪/示波器:6407高性能USB数字化仪/示波器2017-08-03 0
-
数字化测量系统的主要技术特性2018-01-25 0
-
基于XRD98L55图像数字化仪的评估系统XRD9855EVAL2019-04-12 0
-
基于XRD9855图像数字化仪的评估系统XRD9855EVAL2019-04-15 0
-
基于XRD98L59图像数字化仪的评估系统XRD98L59ZGEVAL2019-04-16 0
-
ADM00665,评估板用于将MCP9600热电偶EMF电压数字化至摄氏度,精度为+/- 1C2019-10-28 0
-
数字化改变生活,数字化具有什么意义?2020-05-13 0
-
数字化监控系统的特点及功能2020-12-11 0
-
从数字化实现的角度理解PI环节2021-08-30 0
-
非基于影像的计算机导航系统在骨关节手术中的应用2013-06-08 584
-
基于FPGA的导流叶片角度数字化测量系统_潘瑨2017-03-19 595
-
定制髋关节假体数字化设计2018-03-09 681
全部0条评论

快来发表一下你的评论吧 !
