

消防机器人有哪些功能?消防机器人有什么特点?来详细了解消防机器人吧!
描述
随着社会经济的迅猛发展,尤其是最近几年,许多地区大量高层建筑、地下建筑和大型石化企业不断涌现,由于这些建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。
一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡,这方面公安消防部队已历经诸多血的教训。尤其是当新消防法出台后,抢险救援已成为公安消防部队的法定任务,面对新时期面临的新情况新任务,也为了更好地解决前述难题,消防机器人的配备显得日益重要。
消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。此类灾害具有突发性强、处置过程复杂、危害巨大、防治困难等特点,已成顽疾。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈,有效地解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。现场指挥人员可以根据其反馈结果,及时对灾情作出科学判断,并对灾害事故现场工作作出正确、合理的决策。
消防机器人的发展历史
机器人自60年代初问世以来,经历40余年的发展,己取得长足进步,社会各行各业皆可见其身影。
国际上较早开展消防机器人研究的是美国和前苏联,稍后,英国、日本、法国、德国等国家也纷纷开始研究该类技术。目前已有很多种不同功能的消防机器人用于救灾现场。
日本的消防机器不仅技术引领全球,而且数量也全球之冠。相应的,其投入应用的消防机器人也最多。从1986年日本东京消防厅首次在灭火中采用了“彩虹5号”消防机器人后,消防机器人就逐渐在灭火救灾领域得到广泛的应用,消防机器人技术也得到快速的发展。截至目前,消防机器人已经稳步向第三代高端智能机器人前进。
美国的消防机器人亦处于技术顶点位置,其开发的消防机器人已具备较为成熟第三代功能。
消防机器人在火灾和应急救援中的作用
消防机器人作为代替消防员进入危险复杂环境的特殊装备,必须具有以下几个功能。
移动功能
在消防机器人分类中已经阐述过,可依据当地实际情况采用履带式或者轮式,从灾害事故现场的实际情况考虑,消防机器人的移动载体须具有较强的越野能力和一定的自适应能力,能够自行判断并翻越障碍,自主分析现场情况,能够完成攀爬一定角度的楼梯等复杂功能。
探测功能
消防机器人可以根据灾害事故现场情况依赖于各种电子元器件进行探测,装载摄像头可将现场情况通过通信网络实时传输给后方系统处理,同时有赖于各种传感器。主要分为两类:一类是内部传感器,用来探测在灾害事故现场中消防机器人自身状态参数,反馈给中央大脑DSP,进行合理的路径规划,并根据灾害事故现场情况合理安排,使消防机器人有序开展工作。另一类是外部传感器,用来探测灾害事故现场的各项数据(障碍物情况、火场温度、辐射热强度、有毒气体或者可燃气体种类和浓度和氧气含量等),为后方处理系统提供原始数据。
控制处理通信功能
由于DSP在处理数字信息方面与单片机相比具有无可比拟的优势,因此,消防机器人普遍采用DSP作为信息处理大脑。而控制处理通信主要由三个方面组成:
一是消防机器人内部处理系统。通过各种传感器探测灾害事故现场实际数据,DSP对原始数据进行分析处理。
二是通信网络。可以利用公安消防部队自身的三级组网进行数据传输;也考虑到技术成熟的关系,可以利用公众的2.5代GPRS或者2.75代EDGE网络。以及可直接采用3G网络进行远程无线数据通信,并能实施双工乃至多工通信;另一方法便是线控。
防腐蚀、防爆功能
正因为消防机器人代替消防员进入危险复杂的灾害事故现场,必须考虑到其电子元器件、机械材料等构建承受腐蚀、高温、粉尘、浓烟等恶劣环境的能力,对其关键部位进行防腐蚀、防爆处理,保证其处于稳定工作状态,以确保顺利完成任务。
消防功能
这也是消防机器人的最主要功能。通过消防机器人前期准备准备工作,现场指挥员根据后方辅助决策系统提供信息,并根据其个人历来灭火和抢险救援经验,作出正确判断,发出遥控指令,指挥消防机器人进行现场处置。
消防机器人的主要种类
从主要功能上可分为:
(1)灭火机器人;(2)火场侦察机器人;(3)危险物品泄漏探测机器人;(4)破拆机器人;(5)救人机器人;(6)多功能消防机器人等。
从行走方式可分为:
(1)轮式行走消防机器人;(2)履带式行走消防机器人;(3)履带轮式行走消防机器人等。
从控制方式上可分为:
(1)线控消防机器人;(2)无线遥控消防机器人;(3)自适应消防机器人等。
从智能化程度上可分为:
(1)程序化控制消防机器人;(2)具有感觉功能计算机辅助控制消防机器人;(3)智能化消防机器人等。
从感觉功能上可分为:
(1)视觉消防机器人;(2)嗅觉消防机器人;(3)温感消防机器人;(4)烟感消防机器人;(5)触觉消防机器人等。
消防机器人的特点
优点
1、无生命损伤性。消防机器人作为一种无生命载体,在面临高温、有毒、缺氧和浓烟等各种危险复杂的环境时,在人力所不及之处可充分发挥其作用,大大减少消防人员伤亡。如若配备消防机器人,黄岛油库、湖南衡阳大火、天津港事件酿成的悲剧本可以避免。
2、可重复使用性。消防机器人作为一种特殊武器装备,在细心维护保养的同时,可反复多次使用,发挥其效能。
3、人工智能性。现代机器人是人工智能、神经网络、计算机技术、自动控制、电力电子、模糊控制和机械工业等高端学科的结合体。而消防机器人作为特种机器人的一种,更是揉合了各项高新技术成果,机器人已是反应国家的技术先机与否的标志之一。各国政府技术部门、公司针对消防员面临日趋复杂的应急救援的环境,在目前人工智能已成熟的前提下,结合了其他各项高新技术,针对特殊情况开发出具有针对性的消防机器人。可根据现场实际情况,自主判断实际危险情况来源,进行数据收集、处理、传输反馈、灭火等工作。
缺点
1、维护保养复杂。由于消防机器人属于高新技术的结合体,对操控、维护保养人员有一定的要求,专业方面要求有一定的知识,要定期举行专业人员培训,尤其是电子元件,或可能受到潮湿、浓烟和灰尘等影响,需要一定的维护保养知识基础。
2、造价高昂。由于消防机器人属于高等学科知识和各项先进高新技术的集合体,研制时间较长,研制经费较高,且生产数量并不多,造成价格普遍昂贵,不能大量配备消防部队。同时,各地区经济发展不平衡,政府财政拨出能力有限,也是其不能大量配备消防部队的重要原因之一。
消防灭火侦察防爆机器人
消防灭火侦察防爆机器人采用履带式底盘、可搭载消防水炮、有毒有害气体探测器、温湿度变送器、摄像机、拾音器等不同上装,代替消防救援人员进入易燃、易爆、有毒、缺氧、浓烟等危险灾害事故现场进行探测、救援、灭火,有效的解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。尤其适用于石化、燃气等易爆环境,对提高救援安全性、减少人员伤亡具有重要意义。
整机结构及性能
整机采用48V防爆锂电池及电源管理系统供电,底盘驱动采用48V直流伺服电机,配合直角行星减速机,带刹车。克里斯蒂悬挂,左右独立各12组避震,履带采用拨齿式高强度耐高温阻燃橡胶内嵌凯夫拉纤维和芯筋。上装搭载消防水炮、热成像仪、有毒有害气体探测器、温湿度变送器、摄像机、拾音器等。整机防爆等级Ex d ib mbⅡB+H2 T6 Gb+ Ex cⅡB T6 Gb/Ex tD ibD mbD A21 IP65 T80℃。
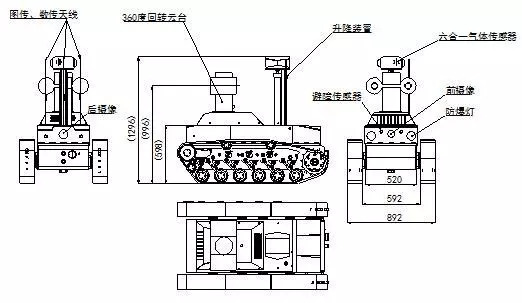
1-TFT水炮 2-喷淋装置 3-红外摄像头 4-六合一气体传感器 5-升降装置 6-数传、图传天线 7-热成像摄像头 8-避障传感器 9-报警灯 10-防爆灯 11-牵引装置
底盘参数
| 序号 | 项目 | 标准要求 | |
| 1 |
外形尺寸 (mm) |
长 | ≤1870 |
| 宽 | ≤950 | ||
| 高 | ≤1450 | ||
| 2 | 最小离地间隙(mm) | ≥150 | |
| 3 | 整机质量(kg) | ≤750 | |
| 4 | 最大越障高度(mm) | ≥220 | |
| 5 | 爬坡能力(%) | ≥70 | |
| 6 | 侧倾稳定角(°) | ≥30 | |
| 7 | 遥控距离(m) | ≥1000 | |
| 8 | 直行速度(m/s) | ≥1.55 | |
| 9 | 直行跑偏量(%) | ≤7 | |
| 10 | 转弯直径(mm) | ≤1800 | |
| 11 | 制动距离(m) | ≤0.15 | |
| 12 | 整机牵引力(kN) | ≥4.5 | |
| 13 | 云台性能 | 初始高度(mm) | ≥1400 |
| 举升后高度(mm) | ≥1900 | ||
| 14 | 喷淋降温装置 | 有 | |
| 15 | 防倾覆功能 | 有 | |
| 16 | 防碰撞功能 | 有 | |
| 17 | 通信功能 | 有 | |
| 18 | 声光报警功能 | 有 | |
| 19 | 防水性能要求 | 有IP67 | |
| 20 | 消防机器人持续工作时间 | ≥5小时 | |
| 21 | 照明功能 | 有 | |
| 22 | 200km可靠性试验 | 符合 | |
| 23 | 负载能力 | 约100kg; | |
| 24 | 额定扭矩 | 约573NM | |
| 25 | 拖着水带能力 | 2条80水带100米 | |
| 26 | 行驶控制方式 | 无线控制、冗余控制 |
水炮参数
| 工作压力范围(MPa) | 1.0~1.4 | |
| 射程(m) | 水 | ≥75 |
| 泡沫混合液 | ≥70 | |
| 流量(L/s) | 80×(1±6%) | |
| 最大喷雾角(°) | 120 | |
| 俯仰角(°) | 俯角 | ≤-15 |
| 仰角 | ≥+90 | |
| 回转角(°) | -120~+160 |
上装参数
红外摄像头:SONY机芯,智能环三维方向可调设计,5-15米红外灯自动开启,4mm镜头,800TVL,材质304不锈钢,防护等级IP68,用作观察设备周围的环境。
红外热成像仪:分辨率384*288、焦距10mm、测温范围20~600℃、精度2%、水平视场角37.4°、垂直视场角20°、热源探测300米~400米。
避障传感器UST-05LN:防止底盘运行时碰撞障碍物。检测区域为150度扇面的避障传感器。
便携式多种气体检测仪 E6000:检测火灾现场CO、CO2、O2、H2S、NH4 、CH4等有毒、有害气体浓度,并报警。其他气体可选。
防爆温湿度传感器:检测机器人周围环境温湿度,测温范围-20~+80℃,湿度0~100%RH。
防爆拾音器(选装):用于搜集火灾现场声音信息,监听面积 60平方米。
防爆扩音器(选装):用于火灾现场搜救时喊话,阻抗8欧姆,功率20W。
遥控箱
语音双向功能:当设备在危险区域,可通过喊话提醒设备周围人员,同时拾取设备周围声音,通知远处的操控人员。
图像稳定传输:将现场周围的环境图像稳定的呈现给远处的操控人员。
数传双向功能:可实时的显示电池内部的各种信息,例如单体电池的温度、电压、总电流等;实时显示机器人状态、机器人内外温度、底盘倾斜度、有毒有害气体浓度报警信息等;控制机器人前进、后退、转向等运动;控制水炮做上、下、左、右、直流、雾化、自摆动等动作。
大容量电池:一次充电后工作时间3个小时以上。
消防侦察防爆机器人
消防侦察防爆机器人采用履带式底盘、可搭载有毒有害气体探测器、温湿度变送器、摄像机、拾音器等不同上装,代替消防救援人员进入易燃、易爆、有毒、缺氧、浓烟等危险灾害事故现场进行探测、救援,有效的解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。尤其适用于石化、燃气等易爆环境,对提高救援安全性、减少人员伤亡具有重要意义。
整机结构
整机采用48V防爆锂电池及电源管理系统供电,底盘驱动采用48V直流伺服电机,配合直角行星减速机,带刹车。克里斯蒂悬挂,左右独立各12组避震,履带采用拨齿式高强度耐高温阻燃橡胶内嵌凯夫拉纤维和芯筋。上装搭载有毒有害气体探测器、温湿度变送器、摄像机、拾音器等。整机防爆等级Ex d ibⅡB+H2 T6 Gb+ Ex c ⅡB T6 Gb/Ex tD ibD A21 IP65 T80℃
底盘参数
| 序号 | 项目 | 标准要求 | |
|
外形尺寸 (mm) |
长 | ≤1600 | |
| 宽 | ≤950 | ||
| 高 | ≤1450 | ||
| 升降杆举升后高度(mm) | ≥1900 | ||
| 最小离地间隙(mm) | ≥150 | ||
| 整机质量(kg) | ≤650 | ||
| 最大越障高度(mm) | ≥220 | ||
| 爬坡能力(%) | ≥70 | ||
| 侧倾稳定角(°) | ≥30 | ||
| 遥控距离(m) | ≥1000 | ||
| 直行速度(m/s) | ≥1.55 | ||
| 直行跑偏量(%) | ≤7 | ||
| 转弯直径(mm) | ≤1780 | ||
| 制动距离(m) | ≤0.15 | ||
| 整机牵引力(kN) | ≥4 | ||
| 防倾覆功能 | 有 | ||
| 防碰撞功能 | 有 | ||
| 防水性能要求 | 有IP67 | ||
| 消防机器人持续工作时间 | ≥5小时 | ||
| 200km可靠性试验 | 符合 | ||
| 负载能力 | 约160KG | ||
| 额定扭矩 | 约573NM | ||
| 行驶控制方式 | 无线控制 |
上装参数
红外摄像头:SONY机芯,智能环三维方向可调设计,5-15米红外灯自动开启,4mm镜头,800TVL,材质304不锈钢,防护等级IP68,用作观察设备周围的环境。
360°回转云台红外防爆摄像头:304不锈钢材质,防护等级IP68,低照度红外自动开启,红外夜视距离30~100米,原装海康一体机芯,36倍光学变倍,焦距为3.3mm~119mm,水平解析度 700TVL(彩色),720TVL(黑白) ,水平连续旋转360°,俯仰±90°,自动聚焦,内置全解码功能。
避障传感器UST-05LN:防止底盘运行时碰撞障碍物。检测区域为150度扇面的避障传感器。
便携式多种气体检测仪 E6000:检测火灾现场CO、CO2、O2、H2S、NH4 、CH4等有毒、有害气体浓度,并报警。其他气体可选。
防爆温湿度传感器:检测机器人周围环境温湿度,测温范围-20~+80℃,湿度0~100%RH。
防爆拾音器:用于搜集火灾现场声音信息,监听面积 60平方米。
防爆扩音器(选装):用于火灾现场搜救时喊话,阻抗8欧姆,功率20W。
-
美军研发能跳《江南Style》的新型机器人2012-11-08 0
-
机器人餐厅2014-07-26 0
-
什么是工业机器人2015-01-19 0
-
机器人视觉——机器人的“眼睛”2015-01-23 0
-
nao机器人与其他机器人的区别2015-02-13 0
-
机器人与未来2015-12-29 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
教育机器人方兴未艾,你了解多少?2018-12-20 0
-
机器人基础书籍2019-05-22 0
-
未来家庭的监控机器人要具备什么特征?2019-10-30 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
什么是服务机器人2021-09-17 0
-
机器人是什么?2022-03-31 0
-
消防|柴油排烟灭火机器人的用处2022-05-10 0
-
消防机器人成为越过火箭的“超人”2022-05-31 0
全部0条评论

快来发表一下你的评论吧 !
