

详解Ardunio使用霍尔磁力传感器
传感器
描述
这三种传感器中,模拟霍尔和霍尔磁力传感器的S引脚输出的是模拟值,线性霍尔的A0引脚输出的是模拟值,D0引脚输出的是开关量。
采用下面的代码分别对这三种传感器的模拟值引脚输出进行监测。
const int buttonPin = A0;
int inputValue = 0;
void setup() {
pinMode(buttonPin, INPUT);
digitalWrite(buttonPin,LOW);
Serial.begin(9600);
}
void loop() {
inputValue = analogRead(buttonPin);
Serial.println(inputValue);
}
将输出值放到matlab中创建图形,图形分别如下:
模拟霍尔传感器的模拟引脚输出图形如下,这是用手拿着磁铁从远及近靠近传感器产生的模拟值图形,曲线最低处是磁铁与传感器距离最近时的输出。
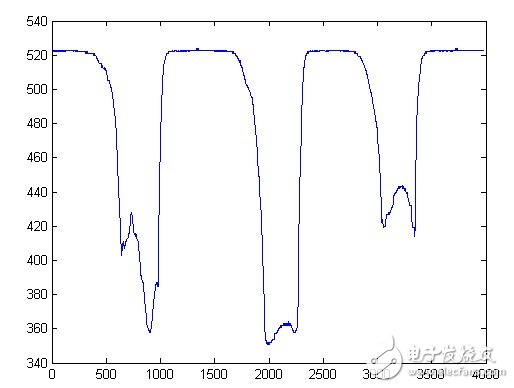
霍尔磁力传感器的模拟引脚输出图形如下,这是用手拿着磁铁多次从远及近靠近传感器产生的模拟值图形,曲线最低处是磁铁与传感器距离最近时的输出。
线性霍尔传感器的模拟引脚输出图形如下,这是用手拿着磁铁多次从远及近靠近传感器产生的模拟值图形,曲线最低处是磁铁与传感器距离最近时的输出。
由于线性霍尔传感器和霍尔磁力传感器上自带有测试LED(线性霍尔传感器上带绿色LED,霍尔磁力传感器上带红色LED),当传感器接近磁铁时,测试LED灯会自动变亮,所以就没有写另外的测试程序了(如果要写的话,就是检测传感器模拟引脚值,当小于某一值时点亮LED灯)。只是做了一个简单的测试视频,视频如下:
PS:模拟霍尔传感器正面接触磁铁时,模拟引脚输出值最低(下左图),反面接触时最高(下右图),另外两类传感器与模拟霍尔传感器正好相反。
-
求助霍尔传感器问题2012-12-25 0
-
开关型霍尔传感器A1104 霍尔传感器A1104资料(深圳响拇指)2013-06-17 0
-
霍尔传感器的原理与应用2016-02-01 0
-
霍尔传感器2017-05-23 0
-
霍尔传感器原理和市场分析2018-11-07 0
-
霍尔式轮速传感器的识别与检测2018-11-16 0
-
什么是地磁传感器2019-03-26 0
-
什么是地磁传感器?2019-05-20 0
-
霍尔传感器定义2020-06-16 0
-
什么是霍尔传感器?2020-08-27 0
-
PMSM有霍尔传感器与PMSM无霍尔传感器的程序有何区别2021-08-06 0
-
有霍尔传感器与无霍尔传感器详解2021-09-06 0
-
初识霍尔传感器应用2011-11-06 1792
全部0条评论

快来发表一下你的评论吧 !
