
资料下载


MultiFLEX 2-PXA270控制器的使用手册资料免费下载
御撒四川卫视
分享资料个
MultiFLEX™2-PXA270 控制器的处理器是 Marvell Xscale PXA270,Xscale PXA270 处理器可工作在 520MHz 的主频下,使得 MultiFLEX™2-PXA270 控制器除了能够处理常规的 IO、AD 和总线数据之外,还能够进行语音识别、视频捕获和处理,让机器人看得见影像、听得到声音成为了可能。。MultiFLEX™2-PXA270 控制器运行的是 Linux 操作系统, Linux 以其内核精炼、高效、源代码开放且免费等优势,在嵌入式领域得到了广泛的应用。
1.1 功能概述 MultiFLEX™2-PXA270 是为智能机器人控制而开发的控制器。它有以下特点:
1、高运算能力、低功耗、体积小。MultiFLEX™2-PXA270 控制器具备 533MHz、32 位的高性能嵌入式处理器和 Linux 操作系统,运算处理能力强大,而功耗不到 2W;体积小巧,可以直接放入仿人机器人体内。
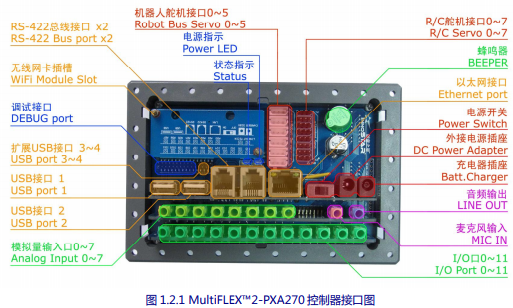
2、控制接口丰富。可以控制直流电机(须配合 BDMC 系列伺服驱动器);可以控制各种信号的舵机(包括所有的传统 R/C 舵机、博创出品的 CDS55XX 系列机器人舵机、韩国 Robotis 公司出品的 AX12+机器人舵机等);可以对机器人舵机进行调速、位置控制、力矩控制;可以同时控制接近 40 路舵机\电机。
3、数据接口丰富。控制器具有 12 路双向可设置的通用 IO 接口,8 路 10 位精度的 AD 接口;还有 RS-422 总线、RS-232 接口;温度、光照、声强、距离等传感器可以通过 IO 和 AD 接口接入,姿态、语音、视觉传感器可以通过 RS-422 总线、RS-232 接口、 USB 接口接入。
4、图形化程序开发方式。使用 NorthSTAR 图形化集成开发环境,可以简单快捷的开发程序,无需理会交叉编译、程序下载等复杂过程

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






