

导弹电液伺服机构原理仿真装置的软硬件设计与实现
工业控制
描述
引言
电液伺服机构作为导弹控制系统的执行机构,广泛用于各种型号的弹道式导弹上,它的响应速度和精度直接影响导弹的命中精度。对于电液伺服机构这样一个结构复杂、要求精密的武器装备,需要电路、液路和气路多方面的知识,且在测试过程中有严格的通电时间限制。目前,基层部队训练和军事院校教学中,由于受通电时间所限,电液伺服机构只能依靠文字、图片、工作流程的动画演示。短期岗位任职技能操作训练,也无法满足“实物实训”的教学训练需求,装备操作号手无法直观体验电液伺服机构内部部件的连接方式和工作过程,不利操作号手对装备本身和原理的深化认知,成为院校理论教学与部队操作训练的瓶颈。
1 电液伺服机构原理简介
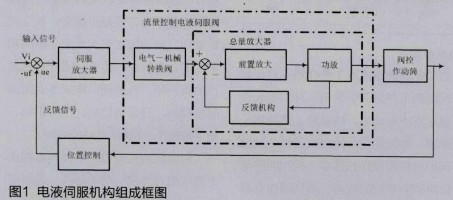
某导弹电液伺服机构组成结构框图如图1所示。它由伺服放大器、转换放大器(电液伺服阀)、液压执行元件、反馈测量元件和液压源等组成。
伺服放大器:是将指令电压和反馈电压信号比较后转变为成比例的电流,控制电液伺服阀工作,达到精确控制的目的;
电液伺服阀:是转换和放大元件,它将伺服放大器放大后的电信号转换为液压信号(流量、压力)输出并加以功率放大;
液压执行元件:是系统在工作中能动作和实现能量转化的元件。
其中作动筒输入的是液压油,输出的是位移和力矩;反馈测量元件:是测量系统的输出量,并转化成反馈信号加入到系统的输入端,与指令信号进行比较输出,形成反馈作用,保证系统稳定性、可靠性、精确性。
2 硬件设计与实现
根据某导弹电液伺服机构原理仿真装置的总体功能要求,在保证与实装工作过程一致的基础上,结合该导弹电液伺服机构及其测试的特点和工作原理,利用较为成熟自动控制技术和智能检测技术,采用先进的ARM嵌入式计算机系统,如图2所示。
由图2可以看出,导弹电液伺服机构仿真系统包含能源回路和控制回路。其中能源回路功用是提供恒定压力、足够流量液压工作介质,对控制回路的工作起保证作用,其主要元件包括直流电动机、柱塞泵、蓄能器、油箱、溢流活门、防污染元件、过载保护元件和操作元件等。控制回路是伺服控制系统的核心,是伺服控制系统实现控制的关键,主要由伺服放大器、电液伺服阀、作动器和反馈电位计组成,其作用是提供控制信号促使能源回路相应地动作,并通过反馈回路,对能源回路的动作加以检测,从而判断整个系统是否已完成了预期的任务。
由于电气器件的多方面的适应性,因而用它们来进行反馈测量以及信号放大和信号操作都很理想,另一方面,液压执行器的输出功率大,结构紧凑,作为动力元件十分合适,在一切电气器件和液压元件的组合中,都需要一个元件作为连接两者的桥梁。在控制系统中,这种转接是由一个电液伺服阀来完成的,伺服阀将小功率的电信号转变为阀的运动,然后阀的运动又去控制流向液压执行器的流量和压力。
控制电路设计采取功能仿真设计,使用嵌入式ARM计算机构成控制系统。硬件部分主要包括:ARM计算机、接口模块、驱动板、各设备电路等部分。采取分布式控制方式,以ARM计算机为核心,配合各类接口扩展板,实现各类信号的采集与控制。系统仿真控制采取成熟工业控制技术,综合各系统功能需求统一设计制作,各子系统功能接口板,如I/O、A/D、数码管驱动、电机控制、总线控制等接口板,根据设备需要独立设计制作,驱动板主要满足部分电路和器件的功率要求。由于采用计算机进行仿真控制,外围接口模块主要完成时序控制、开关量控制、信号采集、电平转换等,总线结构如图3所示。
伺服机构控制电路功能仿真模块主要采用对外接口功能仿真,即利用某导弹电液伺服机构仿真系统可以完成技术阵地电液伺服机构充气压力、油面压力、液压油温度检测等主要任务,再现某导弹电液伺服机构单元测试准备流程中的要点环节;通过某导弹电液伺服机构仿真软件及测试流程,给导弹电液伺服机构仿真装置送入各种测试指令,模拟器根据指令类型及测试进程,仿真各种现象,并在面板上显示各种状态信息。导弹电液伺服机构仿真系统控制面板如图4所示。
嵌入式ARM计算机综合处理由电液伺服机构仿真设备发来的各种操作信息,并进行分类处理,一方面将操作信息发送到外围设备处理模块,使各分电路工作协调一致,实现信息同步交流与共享;另一方面将处理信息上传到教学系统终端,进行多媒体教学互动和训练监控与管理,嵌入式ARM计算机模块与上位机的组合结构图如图5所示。外围模块主要完成各设备或仪器的功能仿真,既能独立工作,又通过总线结构,与通用计算机的进行信息交换,保证系统的同步协调。
导弹电液伺服机构原理仿真装置通过建立具有与模拟操作测试同步刷新功能的电路、液路和气路原理软件演示系统,利用串口通信协议,接收操作控制面板实时发送的模拟操作硬件接口信息,启动相应的测试原理动态显示模块,实现测试原理的实时动态教学。可直观、形象的展示电液伺服机构各部件结构、连接关系及其整体配合工作情况,对操作号手认知装备结构、深化原理掌握,具有较好的支撑和保障作用。
导弹电液伺服机构原理仿真装置的硬件设计综合采用光电隔离、电磁屏蔽、数字滤波、软件容错等技术,实现控制电路的模块化、通用化设计,便于提高系统的抗干扰能力,保证系统运行的高可靠性。通过选用工业级液压元件仿真电动液压能源仿真装置和电液伺服作动器仿真装置,通过透明液压管路连接各液压系统,通过控制面板设计实现伺服机构单元测试实作环节仿真,最终实现电液伺服机构原理仿真。
3 软件设计与实现
系统软件主要包括管理软件、主控软件、子机控制软件、通信软件、虚拟仿真软件、教学软件等。为提高编程效率,采用了模块化设。
系统软件:本系统使用的计算机辅助测试软件是C语言和组态软件。C语言在Windows操作系统下不仅具有很强的图形处理功能,而且能对I/O接口的数据进行快速的读写,还可以直接控制计算机的接口,运行速度快,适于动态特性试验,而组态软件具有界面直观和操作方便的特点,适宜进行各种液压元件的稳态特性试验。
主控软件:主要进行操作过程和控制逻辑的仿真,主控程序和相应的硬件电路相配合,完成操作训练过程中各种开关量的采集、分析判断、输出控制,是保证操作模拟系统正常工作的核心软件。为确保编制效率,方便调试修改,控制主程序采用模块化设计,共分为:菜单模块、数据采集模块、逻辑运算与判断模块、开关量输出模块、模拟量运算模块和打印输出模块等,各模块之间采用数据耦合的形式,通过公共接口进行数据传输,在协调系统工作的情况下,有效保证系统运行速度。在整个操作过程中,会根据用户的操作自动在各显示界面跳转,并对数据进行自动判读,现象、状态均与真实界面一致。如果获取的操作逻辑与已存储的逻辑均不一致,系统会人为用户进行了误操作,停止硬件现象控制,所有状态恢复初始值,并在软件界面给出用户提示。菜单是电液伺服机构仿真系统进行人机交互的主要界面,菜单提供各种测试项目选择,程序退出也是由菜单选择控制的。事件处理部分采用逻辑原理仿真,对错误操作具有一定的容错性,保证了系统在操作出错情况下不会出现卡死现象。控制主程序流程图如图7所示。
通信软件:主要满足计算机与计算机之间、计算机与单片机之间以及网络通信要求。本系统的通讯方式主要包括以太网通讯和RS232串口两种类型。在设计时,同时考虑了号位硬件响应速度的不同,对RS232串口单独开辟线程,当需要响应时,以委托的方法向主进程发送请求,以协调不同的响应速度并防止程序线程栓塞。
故障诊断软件:在设备的硬件和软件上都有故障设置功能,来实现软、硬件一体化的故障设置及配套系统。硬件设置上留有故障设置开关,软件上建立故障库,用来训练操作号手分析、排除一般故障的能力,并把分析、排除故障的成绩记录,作为训练管理分系统的原始数据,为号手评定操作等级提供依据。
视景仿真软件:为了方便教学训练,电液伺服机构原理仿真系统加入了各设备的3D模型和系统的工作原理演示动画。利用虚拟现实技术,以虚拟动画和3D模型形式实现导弹电液伺服机构系统仿真,重现导弹电液伺服机构系统工作全过程,使参训人员能直观的了解到测试过程中的设备状态变化情况,弥补模拟操作真实感不强的不足。
4 结束语
本文研制的导弹电液伺服机构原理仿真装置综合运用现代控制技术、机电一体化技术和视景仿真技术,搭建了系统的硬件平台,建立了基于实体元件和虚拟视景相结合的复杂装备的物理仿真模型。系统集成了某导弹电液伺服机构及其测试的教学与训练功能,能够完成复杂装备外观结构展示、工作过程演示、工作原理学习、故障分析排除等科目,解决了导弹电液伺服机构元件多不宜认知、结构复杂难于拆解、工作过程涉及机电液一体化难于仿真等难题,拓宽了导弹武器复杂装备模型仿真的新思路。
该导弹电液伺服机构原理仿真装置既可代替实装进行分系统教学训练,又可进行操作流程的教学训练,还能够进行简单的故障分析排除教学训练,大大减少了导弹部队采用实战装备训练的次数,降低了教学训练费用,保证了教学训练时间,提高了导弹部队的教学训练效果,深受基层部队和相关院校的欢迎。
-
单片机软硬件联合仿真解决方案2008-07-17 0
-
支持过程级动态软硬件划分的RSoC设计与实现2010-05-28 0
-
如何使用KEIL进行软硬件仿真2012-08-20 0
-
基于SoPC的状态监测装置的嵌入式软硬件协同设计2013-01-22 0
-
基于DSP的数字伺服机构控制系统设计2014-11-07 0
-
导弹伺服机构与CAN总线的连接和通信2019-06-11 0
-
基于Altera FPGA的软硬件协同仿真方法介绍2019-07-04 0
-
基于VXI总线的导弹伺服机构单元测试基本型系统2009-07-15 742
-
基于PC/104伺服机构自动化测试系统研究2009-09-09 526
-
基于PC104伺服机构自动化测试系统研究2009-12-22 610
-
仪器伺服机构循环电路图2009-06-20 374
-
伺服机构自动搜索及控制电路图2009-07-02 505
-
关于伺服机构的动态测试系统2011-04-04 649
-
电液伺服机构与CAN总线接口设计2011-08-16 1301
-
基于SoPC的状态监测装置的嵌入式软硬件协同设计与实现2013-01-16 1699
全部0条评论

快来发表一下你的评论吧 !
