
资料下载


如何使用超声波定位进行机器人的路径规划资料概述
雾凇11
分享资料个
随着机器人技术的发展和广泛应用,移动机器人渐渐走入人们的家庭生活。移动机器人在室内环境的运动规划成为其研究的一个重要方向。室内环境包括家庭、敬老院、博物馆、机场、仓库、养殖场等,移动机器人想在室内运动,需要定位系统提供自身位置信息、环境信息和路径规划。
本课题综合多项技术,面向实际应用在技术应用方法上做出了一定的创新工作,改进了路径规划,完成了室内定位系统的研发和室内环境信息的建模。并通过仿真和实际机器人完成了实验验证。具体工作分为以下几点:
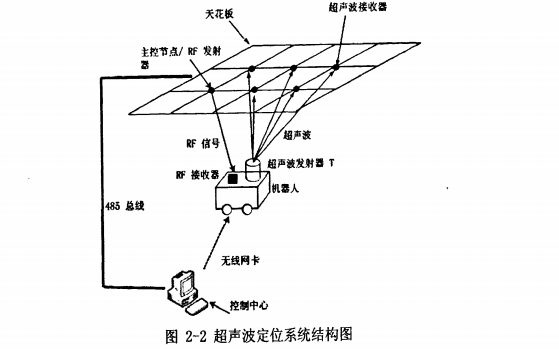
设计和实现了超声波定位系统的硬件部分和通信协议,选择三边测量法完成受控物体在运动空间的位姿计算。此处选受控对象为机器人,也可以是人、动物及需要定位和获取相关信息的移动物体等。
提出建立未知环境地图的方法。机器人在位黄已知的情况下,沿工作环境边缘行走一个封闭的曲线,对环境的大小进行一个全面的感知,建立环境的轮廓,用栅格法表示。最后在未知环境栅格化的基础上应用深度优先算法遍历整个可行的工作空间,搜索出所有的可行路径的同时也就知道了所有的障碍物,建立了室内环境地图。
改进经典A木路径搜索算法,实现了机器人了从起点到终点的全局最优路径规划。该路径搜索算法考虑了机器人在行走过程中的转向问题,节省机器人行走时间,降低行走难度。
用实现的超声波定位系统采集试验数据,计算移动物体位置,验证系统的可靠性。通过仿真验证了本课题提出的未知环境的建模和改进的A木路径规划算法的正确性。最后通过MT—R机器人完成全局路径规划实验。
近几年,随着机器人技术的大力发展,人们不再满足于机器人简单的娱乐功能,怎么能让机器人进入家居环境,帮助人类减轻家务负担成为目前机器人研究的重点方向。经过科学家多年的研究,各国在室内环境下的机器人应用有了很大的发展。
为了完成家居环境、宾馆和一些公共场合的定期清扫工作,美国iRobot公司推出室内清洁机器人;为了使机器人可以安全行走在家居环境中实现儿童监护功能,2005年日本推出PaPeR02005机器;为了在家居中类人机器人能够从事简单清洁工作和家务,2008年加拿大推出完美机器人妻子Aiko;为了在无入时监控家居环境,韩国研制出irobi机器人。
对于室内环境下的机器人应用研究,我国研究起步较晚,但是也取了一些成果。为了护理高位截瘫病人,1995年清华大学开发了移动护理机器人,此机器人可以完成定位,路径搜索功能;此外将移动机器人应用于室内环境的还有哈尔滨工业大学研制的清扫机器人,迎宾机器人等。
机器人在家居环境应用,就必须知道机器人在室内的位置和室内环境信息,在此基础上完成路径的规划。从上面可以看出,这些位置信息的确定,多是利用机器人本体进行计算,这需要机器人本身带有繁琐的测量仪器,计算量大,获取困难、而且定位精确度低。 而且对于同~个室内环境,每个机器人都必有自己的定位系统,这必然增加了机器人的成本,限制了机器人在室内环境的广泛应用。
本课题从于节省成本,扩大机器人在室内环境应用的可行性方面出发,提出了一个将机器人位置信息获取、室内环境地图建立和路径规划相融合的整体方案来实现机器人在室内环境的应用。
本课题中利用价格低廉的超声波传感器构建室内超声波网络定位系统来获取机器人位置信息;在确定机器人位置基础上提出基于栅格的DFS(深度优先搜索)室内环境地图建立,为机器人提供更详细的室内环境信息;在机器人获得自身位置信息和环境信息之后,利用改进的A木算法实现机器人的室内路径规划。
随着我国老龄化的到来,研究机器人室内环境的应用具有实际意义。本课题构建的机器人任室内环境的应用系统,具有简单易于实现,成本低,独讧性好的特点。不论机器人是否带有自动定位系统,本课题都适用,推进了移动机器人在室内环境应用的可行性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







