
资料下载


基于T-S模糊模型的预测控制算法在城轨列车制动控制中的应用
分享资料个
城市轨道交通因其自身载运量大,速度快,零阻塞等诸多优点在现代城市生活中起着越来越重要的作用。制动系统性能直接影响到列车运行的平稳性和安全性,其是一个时变、时滞和非线性的控制系统。提出一种基于T-S模糊模型的预测控制算法,对城轨列车制动控制系统进行仿真,可以实现快速、精确同步制动,从而克服受控对象的不确定性、迟滞和时变等因素的动态影响,从而达到预期的控制目标,并使系统具有良好的鲁棒性和稳定性。
伴随着我国城市化进程的加快,城市交通压力越来越大,为形成方便快捷的城市交通网络,越来越多的城市将建设城市轨道交通纳入计划。地铁作为城市轨道交通的主力军,其技术性能直接影响运载能力。制动技术作为保障列车运行的关键技术之一,一直备受关注。制动系统是列车操纵系统的组成部分,它用来调节车速和进行停车,是列车安全可靠运行的基础。现代城轨列车常用电空混合制动系统,它通过制动控制器协调电制动和空气制动的介入比例,基本能够保证在车速变化情况下一致的制动性能。
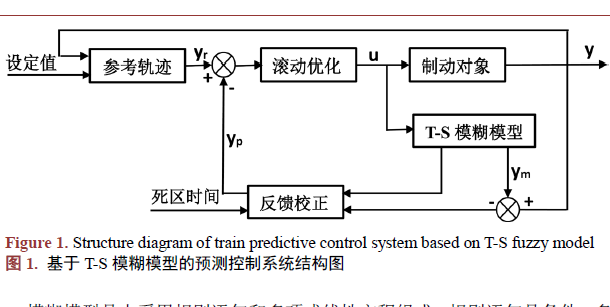
基于模糊预测控制的方法,根据列车运行过程中几个优化控制目标确定其相应的评价函数,并建立多步预测控制模型,用多目标满意优化模型进行滚动优化。设计了基于模糊预测控制的城轨列车PID 速度控制器,使列车的跟踪性、舒适度等指标都有了明显的改善。采用模糊预测控制算法,针对列车自动驾驶的性能指标建立对应的模糊隶属度函数,基于人工驾驶策略建立了相应的模糊控制规则,对惰行节能优化进行了曲线优化。提出的基于模糊预测控制的制动控制方法,利用模糊遗传算法进行滚动优化,获得了全局最优解作为预测控制控制器的输出,进而提高了系统控制快速性和稳定性。提出了带有舒适度约束条件的模糊预测-PID 复合控制方法,分情况进行制动距离的优化。由于制动系统本身存在时滞,会对闭环系统稳定性造成破坏,因此制动系统通常采取开环控制策略。然而,线路阻力的不确定性、闸瓦摩擦系数的非线性及制动系统所受随机扰动都会对制动系统带来不利影响。开环控制方法由于无法消除这些因素的影响,从而在一定程度上降低了制动系统的性能。本研究拟对城轨列车制动控制这样一类具有非线性、时变性和迟滞特性的控制对象进行研究,通过分析其动态过程,以及相关因素对控制的影响,提出一种基于T-S 模糊预测控制模型的制动控制方法,并进行仿真和优化设计,实现制动控制系统的快速和精确制动。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




