
资料下载


无人机的检测和跟踪系统中的技术资料研究
分享资料个
无人机技术随着现代科学技术的发展也日渐成熟,它参与了民用领域中的诸多行业,具备高效率、低成本、大产出等优势。与此同时,无人机对空域的安全也造成了严重的威胁,所以各国也开始研发各自的反无人机系统。将红外成像技术应用到反无人机系统中,不仅具有抗干扰、隐蔽性好和适应天候能力强等优点,而且价格和维护成本也相对低廉。红外反无人机系统也存在着许多难点问题,如何尽早的发现无人机,如何更快的跟踪无人机就是其中的难点问题。这便需要我们来尽可能的加强无人机的检测距离。因为距离的原因,无人机目标在图像中的表现形式非常小,再加上外部的噪声和背景杂波的影响,这对我们能否顺利检测到无人机以及跟踪无人机造成--定的困难。怎样才能实现对无人机快速准确的检测和跟踪,这是很重要的一项研究。本文就是对无人机检测和跟踪中所用到的技术进行研究,接下来介绍本文的有关研究内容。
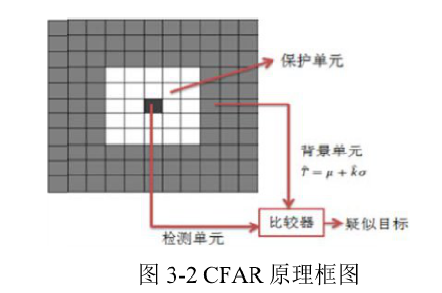
对于图像的预处理,本文研究了无人机的结构组成及红外成像特性。对实测的红外无人机图像进行了分析,通过实验分析得到一种较为实用的预处理方法;在红外无人机目标检测方面,本文分别对DBT和TBD两类算法进行了研究,并在易于工程上实现的DBT算法中提出了一种基于动态阈值的CFAR多帧关联检测方法,该方法能够有效地提高单帧图像目标检测率和降低虚警率;在红外无人机目标跟踪方面,本文将基于随机有限集的伯努利滤波算法应用到红外无人机目标跟踪,通过实验证明标记多伯努利算法能够稳定跟踪多个指定的目标,并且能够通过标签将各个目标很好地区分;在无人机群目标跟踪方面,本文采用基于聚类的LMB群目标跟踪算法,避免了直接使用LMB算法对无人机群目标跟踪产生的轨迹交叉混乱和群内目标个数估计误差较大等问题,实现了对单群目标中心稳定跟踪;最后,针对多群交叉产生聚类中心不稳定的问题,本文采用了二次聚类方法,能为LMB跟踪算法提供更可靠的群内小中心,合并小中心轨迹后,便可得到群目标中心轨迹。通过实验证明,该方法能够解决群目标交叉时聚类中心不稳定导致目标丢失的问题。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




