
资料下载


×
如何使用室内环境约束的行人航向粒子滤波算法进行修正方向误差
消耗积分:0 |
格式:rar |
大小:1.15 MB |
2018-12-18
分享资料个
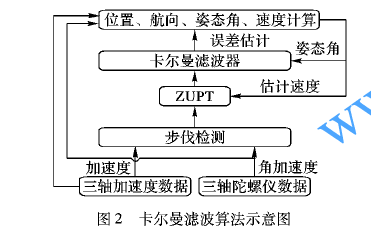
在传统的基于航位推算和卡尔曼滤波的室内行人定位算法中,存在着航向误差累积的问题,这使得位置误差也会不断累积。针对这个问题,提出了室内环境约束的行人航向粒子滤波算法来修正方向误差。首先,将室内地图信息抽象成线段表示的结构体,将地图数据动态地融合到粒子补偿以及权重分配的机制中:其次,通过关联地图数据与待校准样本构建航向自修正机制;最后,通过关联地图数据与粒子落点构建依距离赋权机制。此外,该算法还简化了粒子滤波模型,将航向作为唯一状态量进行优化,在提高定位精度的同时降低了状态向量的维度,进而降低了数据分析处理的复杂性。通过融合室内环境信息,该算法有效地抑制了方向误差的持续累积。实验结果表明,与传统的卡尔曼滤波算法相比,所提算法能够明显地提高行人定位精度和稳定性,在距离为435 m的二维行走实验中,航向误差由15. 30降低到0. 90,终点位置绝对误差由5. 50 m降低到0.87 m。
随着互联网、物联网、智能移动设备等相关技术的发展和应用,基于位置的服务( Location Based Service,LBS)以其强大的实用性和广阔的发展空间逐渐成为了学术领域和工程领域共同关注的热点。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






