

MEMS传感器在工业自动化中的设计
描述
工业4.0和工业物联网(IIoT)等计划正在帮助制造企业提高生产流程的效率。基于云的分析应用程序负责整理和提供运行生产或制造操作的许多不同方面的上下文。这些应用程序从工厂车间和每个制造设备中部署的传感器中获取重要数据。传感器用于测量实时世界,并且在大多数情况下,将模拟测量转换为数字信号。环境参数包括温度,湿度和气压,但还有许多其他特性,如气流,液压流体压力和接近度。其他类型的传感器需要精确测量运动和相对位置。这些可包括用于机器人和自动化的惯性导航,工业设备的状态监测以及冲击检测和记录。微机电系统(MEMS)由于其紧凑的尺寸,低功率特性和极其精确的测量能力而越来越多地用于这些任务。本文将解释基于MEMS的加速度计和陀螺仪设备如何工作,并展示一些专为工业自动化应用而设计的示例。
MEMS器件采用硅片构建,其方式有多种非常小的移动结构。通常,这可能是一个结构或质量(检验质量),根据测量的内容横向或垂直移动。这种运动或位移可能是加速力的结果,例如相对位置的变化。通常通过微机械元件之间的电容变化来检测这些微观运动的测量。重力本身产生1 g的恒定加速力,这是加速度计可以测量的,其倾斜度与加速度计相对于重力场的角度的正弦成正比。高精度模拟前端测量检测质量和固定结构之间的电容,然后使用模数转换器(ADC)将信号带入数字域。然后使用微控制器处理所接收的数据以及许多基于软件的滤波器,这些滤波器可以拒绝与有效运动无关的信号。单个基于质量的单一MEMS传感器可以在一个方向上检测加速力,因此对于实际的3D目的,需要三个单独的MEMS结构(图1)。
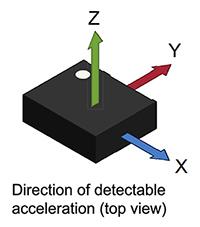
图1:检测3D加速度。
在检测角速率变化时,陀螺仪MEMS传感器使用微机械振动元件而不是旋转机构。该振动元件保持在固定平面内,并且通过电容的变化检测滚动,俯仰和偏航的角速率的变化(图2)。作为测量过程的一部分,可以针对检测到的任何加速度或振动补偿角速率。
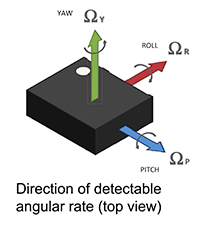
图2:偏航,俯仰和滚转的检测使用MEMS陀螺仪的角速率。
能够准确连续地测量方向和角速率的变化是任何工业自动化机械的重要组成部分,其中最值得注意的是工业机器人。过去,可能已经使用了需要定期校准和校准的旋转传感器和编码器的复杂机械布置。随着MEMS加速度计和陀螺仪技术的出现,对其潜在用途进行了大量研究。该研究确定了需要将多个加速度计放置在工业机器人的6轴自由度(DOF)上(图3a)。图3b显示了描述运动和角速率检测的复杂性质的图表。
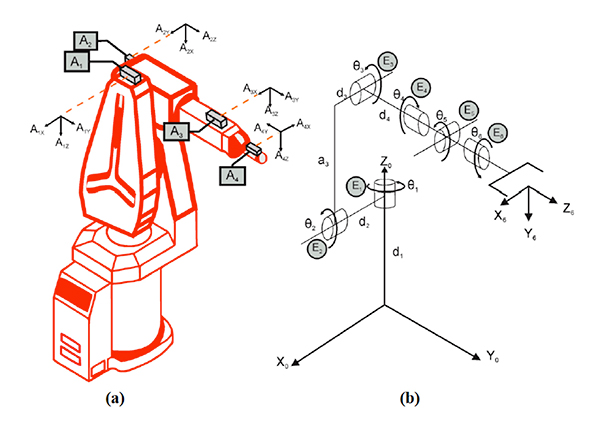
图3:显示加速度计放置的简单工业机器人 - 图图3a-和图表 - 图3b-说明了为了在整个允许的范围内完全控制机器人而需要测量的不同参数的数量。
满足当今工业自动化设备的需求是各种基于MEMS的组合3D加速度计和3D陀螺仪模块,如STMicroelectronics的ISM330DLC。作为意法半导体全面的MEMS产品系列的新成员,ISM330DLC闭环系统级封装(SIP)专为工业4.0应用而设计。该器件的3D加速度计和3D陀螺仪均在同一硅片内加工,从而确保了最佳的稳定性和稳健的操作。加速度计和陀螺仪都具有几个高度准确和可靠的可配置检测范围。满量程加速范围选项为+/- 2 g,+/- 4 g,+/- 8 g或+/- 16 g。陀螺仪的满量程角速率检测选项为+/- 125度/秒(dps),+/- 245 dps,+/- 500 dps,+/- 1000 dps或+/- 2000 dps。
《 p》采用1.71至3.6 VDC供电,接地栅阵列LGA-14L封装模块尺寸仅为2.5 mm x 3 mm x 0.83 mm,在高性能组合模式下工作时最大电流为0.7 mA。开发人员可以使用多种不同的省电模式,允许独立关闭加速度计和陀螺仪,在此期间功耗可降至最低10μA。两个传感器的中间低功耗模式消耗不超过0.35 mA。在正常条件下运行时,功率通常会增加到0.5 mA。可以通过模块的SPI或I 2 C串行接口实现与主机处理器的通信。如果需要额外的应用要求,还可以配置辅助SPI输出以提供传感器数据的辅助和独立通道。独立的低通滤波器提供传感器数据,用于光学图像稳定(OIS)应用。陀螺仪还配备了温度传感器。
ISM330DLC配备了许多智能功能,进一步扩展了设备的功能,可用于各种应用。首先,提供传感器集线器功能允许从多达四个额外的外部传感器捕获,存储和处理数据。提供这种集线器功能对于不仅希望在其设计中添加加速度计和陀螺仪传感器而且希望添加一些额外的传感器以适应应用的开发人员特别有用。通过这种方式,传感器可以直接连接到ISM3300DLC的I 2 C Master,而无需应用处理器的任何资源。 4kbyte FIFO缓冲器提供了一种存储该数据的便捷方法,无需从主机应用处理器进行任何中断或资源分配。如果需要,可以对FIFO缓冲区进行分区,并且不仅可以存储附加的外部传感器数据,还可以存储每个条目的时间戳并记录陀螺仪传感器的温度。
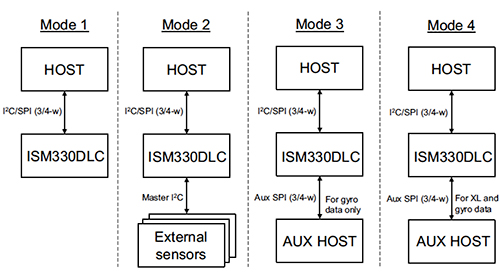
图4:ISM330DLC连接模式。
上面的图4说明了可能的四种不同连接模式。在模式1中,只有陀螺仪和加速度计有效并连接到主机应用处理器。模式2增加了通过I 2 C接口从多达四个外部传感器捕获和存储数据的功能。模式3和4允许陀螺仪数据(模式3)以及陀螺仪和加速度计数据(模式4)呈现给辅助SPI 3或4线接口。模块的时钟可以与外部源同步。
模块的智能功能还包括几个闭环功能,例如提供6D方向信息的能力,自由落体事件,设备唤醒功能省电模式和活动/不活动识别。另一种更适合与手持式工业控制设备的用户界面交互的智能功能是能够检测单点击或双击或点击。
也许信号处理电路最重要的功能之一就是过滤。低通(LP)和高通(HP)滤波器的组合用于抑制不需要的外来信号对传感器读数的任何影响。通过辅助SPI接口提供单独的专用低通滤波器用于稳定控制环路 - 通常是光学图像稳定(OIS)。
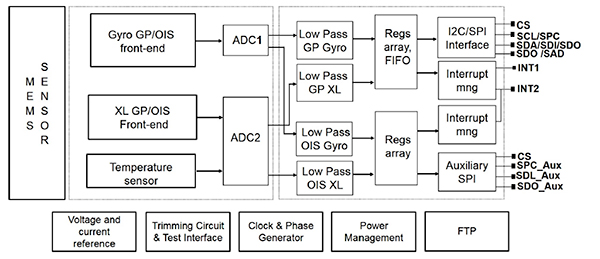
图5:阻塞3D加速度计和3D陀螺仪滤波器的示意图。
图5显示了从MEMS传感器通过模数转换器,滤波器模块到主SPI/I 2的信号流 C接口。滤波器模块的确切配置取决于许多因素,例如所选的输出数据速率(ODR)和传感器的满量程检测范围。 ODR可配置为12.5 Hz至6.66 kHz。例如,当在模式1操作中使用时,数字信号处理仅针对主IO。在模式3和4中,在信号处理链中插入了额外的滤波器,以将输出引导至辅助SPI接口(图6)。
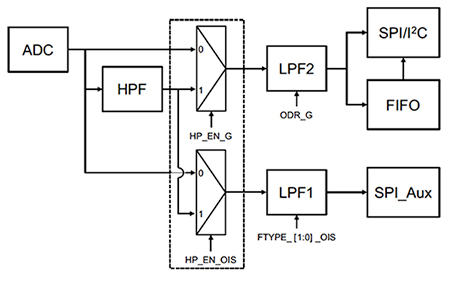
图6:在模式3中使用时的陀螺仪数字信号处理链。
与任何新设备或技术一样,范围的可用性硬件和软件工具极大地帮助了第一个设计的原型设计。在这方面,ISM330DLC得到了很好的支持。意法半导体已经为此提供了全面的评估板,其中大部分基于STEVAL-MKI109V3 MEMS主板。这提供了一个完整的,随时可用的开发和原型设计平台,可用于评估基于MEMS的设计(图7)。
图7 :STMicroelectronics的MEMS主板平台 - STEVAL-MKI109V3。
可以使用一系列不同的适配器板插入主板上的DIL24插座。对于ISM330DLC,适配器板是STEVAL-MKI182V1(图8)。可以在PCB的中心看到ISM330DLC被一些无源元件包围。
图8:ISM330DLC适配器板 - STEVAL-MKI182V1。
主板托管STM32F401高性能105DMIPSArm®Cortex®-M4微控制器(MCU),充当传感器适配器之间的桥梁板和开发PC。该MCU包括一个浮点单元(FPU),这是需要执行快速浮点计算的应用程序的基本要求。它还配备了零等待状态自适应实时加速器,一组16位,32位和PWM定时器,以及多达12个接口,包括3 x I 2 C,3个USART ,4 x SPI和符合USB 2.0标准的全速控制器。主板的框图如图9所示.USB接口连接到PC,提供为主板和适配器供电的方法,同时促进设备固件升级(DFU)过程,无需任何其他开发工具。
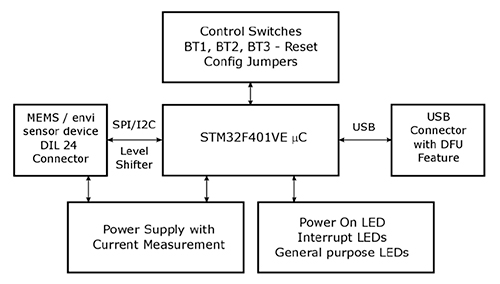
图9:MEMS评估主板框图。
对于PC,STMicroelectronics提供免费的Unico Lite基于GUI的软件应用程序,显示如何配置选定的MEMS传感器并管理来自它的数据流。该软件提供了一个可靠的平台,可以从中尝试不同的输出数据速率,检测灵敏度和集成其他传感器。初始设置屏幕如图10所示,可在Microsoft Visual Studio中配置以满足每个传感器模块的要求。
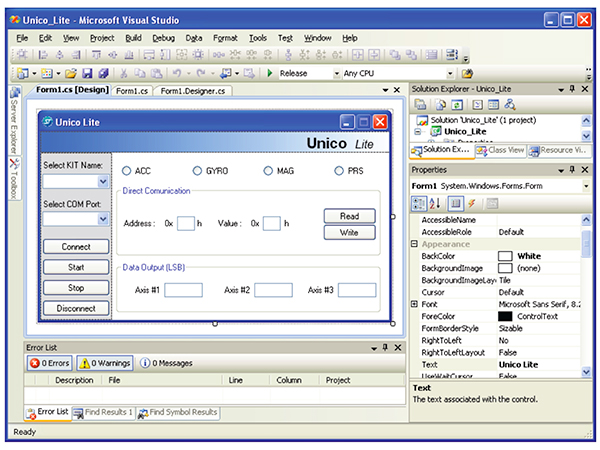
图10 :Unico Lite软件的图形用户界面,显示在Microsoft Visual Studio中配置布局的功能。
一旦设置并运行,Unico Lite软件就可以实时显示多个传感器参数,以说明它们对变化位置和角度移动的反应。
这样,开发人员工业自动化机械可以快速原型设计,测试和调试初始设计。由于所有原理图,Gerber和布局文件都是在开源的基础上为主板和适配器板提供的,因此采用更完整的设计是一个非常简单的过程。
传感器的数量任何工业自动化应用中所需的,例如图3中所示的工业机器人都是重要的。通过提供每个肢体空间位置的可靠和实时反馈,机器人的控制器和执行器可以确保它将效应器工具移动到空间中的期望位置。但MEMS陀螺仪和加速度计不仅仅是为了确保位置控制。它们还可用于检测旋转或铰接机械接头中增加的振动,这些机械接头开始出现过度磨损或即将发生故障的迹象。实施适当的预防性维护制度是任何工业自动化装置的一个重要方面,MEMS传感器的使用是传感和监测工厂运行的关键组成部分。
结论
MEMS加速度计和陀螺仪非常适合用于各种工业自动化应用。凭借其微小的尺寸,高可靠性和低功耗认证,MEMS传感器几乎可以在任何工业自动化机械中发挥重要作用。
-
MEMS传感器的分类2013-10-11 0
-
汽车电子MEMS传感器的应用2016-12-07 0
-
芬兰METSO自动化厚度扫描传感器2018-10-24 0
-
机械自动化对拉绳位移传感器需求2018-11-08 0
-
MEMS磁传感器主元件SEM电连接及设计2018-11-09 0
-
毫米波传感器在汽车和工业的应用2019-03-21 0
-
MEMS惯性传感器与工业环境2019-09-03 0
-
基于GSM工业自动化系统的设计方案2020-09-01 0
-
工业自动化中mems的作用是什么2020-11-24 0
-
工业自动化应用中的主要机器故障类型2020-12-07 0
-
用于工业自动化解决方案的传感器类型2020-12-25 0
-
MEMS气压传感器在IoT中的应用有哪些?2021-07-08 0
-
传感器有什么作用 为什么使用传感器2021-09-10 0
-
如何实现工业自动化?传感器对于工业自动化有什么样的意义2020-06-13 5415
-
使用 MEMS 传感器感知工业自动化世界2022-11-25 82
全部0条评论

快来发表一下你的评论吧 !
