

智能扫地机器人陀螺仪构建地图导航方案
描述
随着人们生活水平的提高,智能扫地机机器人已经进入千千万万的家庭,解放人们的双手。扫地机器人系统是一个复杂的系统,通常智能扫地机器人由移动系统、感知系统、控制系统、清扫系统、导航系统、以及电源系统组成。
随着计算机技术,人工智能技术,传感器技术以及移动机器人技术的发展,很多智能系统开始运用到扫地机方案开发技术中。而陀螺仪技术日趋成熟,成本也大大减少。
陀螺仪是一种能够地确定运动物体方位的仪器,根据需要提供准确的方位、水平、位置、速度和加速度等信号、控制及方位支持。被广泛应用于船舶、飞机的自动控制、导航系统、航海导航、汽车生物、环境监测、智能手机领域,智能家居行业。
陀螺仪构建地图导航方案GPM3207
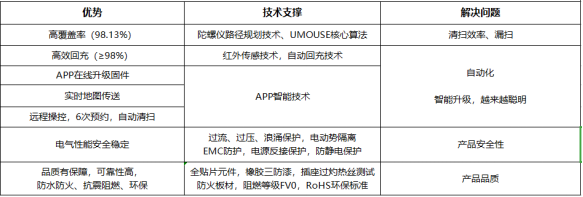
GPM3207惯性导航路径规划方案是采用Umouse扫地机器人专用CPU USR3207T以及韩国陀螺仪模组规划弓形路径,清扫覆盖率在行业同类机型中处于顶尖水平。
方案支持吸口滚刷互换、电控出水,多档水量调节、App远程控制、实时地图传送,6次预约,水箱尘盒识别、虚拟墙等功能,主要用于中高端扫地机,规划式主打走量机型。
想了解更多智能扫地机器人陀螺仪构建地图导航方案,欢迎联系云鼠!云鼠助您成为下一个科沃斯!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
其利天下技术·搭载无刷电机的扫地机器人的前景如何?2024-05-05 0
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 0
-
扫地机器人如何选购?2015-01-21 0
-
扫地机器人方案2015-05-18 0
-
【NanoPi2申请】扫地机器人2015-12-02 0
-
原来扫地机器人是这样工作的!2015-12-24 0
-
扫地机器人怎么制作2017-01-12 0
-
智能扫地机器人解决方案2017-05-27 0
-
如何选择好的扫地机器人2018-08-20 0
-
智能扫地机器人用什么马达2018-10-12 0
-
机器人导航扫地机器人方案2019-05-11 0
-
小米扫地机器人功能介绍以及芯片参数2021-10-28 0
-
服务型智能扫地机器人的主要功能有哪些呢2021-11-08 0
-
扫地机器人EMC方案2023-02-08 0
-
通过智能扫地机器人的陀螺仪构建地图导航方案2020-12-26 516
全部0条评论

快来发表一下你的评论吧 !
