

 从“惊天三连跳”说起,解读机器人灵巧行走背后的技术秘密
从“惊天三连跳”说起,解读机器人灵巧行走背后的技术秘密
MEMS/传感技术
描述
记得三个月前,朋友圈被来自无数公众号发布的动力机器人“惊天三连跳”给刷屏了,高台跑酷如履平地,实在叫人震撼!然而在机器人快速发展的今天,有多少人知道曾经的“傻宝”机器人?那种一步歪步步歪、平地缓行都能跌倒的痛,外行是无法体会的。在2018年的RoboMaster机甲大师赛上,这种稳定行走已经是大学生机器人设计的基本要求,比如参赛队香港科技大学ENTERPRIZE战队和哈尔滨工业大学I Hilter战队均采用了ADI公司的陀螺仪确保运动的稳定性。
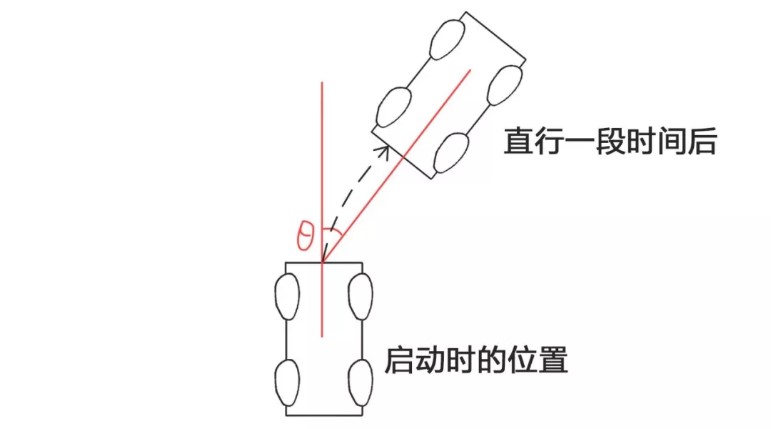
早期不成熟机器人走直线的结果是歪歪曲曲的,只因它在行进过程中的各种扰动使得其发生了绕着垂直于地面方向的旋转。所以科学家们寻找了一种传感器,可以用来测量机器人垂直于地面方向的旋转量,然后再通过在系统中不停地加入计算结果,最后达到消除误差的目的。
MEMS 陀螺仪,灵动机器人背后的秘密
在2018年的RoboMaster机甲大师赛上,这种稳定行走已经是大学生机器人设计基本的要求,比如参赛队香港科技大学ENTERPRIZE战队和哈尔滨工业大学I Hilter战队均采用ADI公司的陀螺仪确保运动的稳定性。
而在RoboMaster机甲大师赛中采用的ADIMEMS陀螺仪(微机械陀螺仪)就利用了这个原理测量旋转度(即角速度)。MEMS陀螺仪在测得角速度之后,再将其进行积分就可以得到相对角度(此时主要是通过参考自身的某一状态,比如刚启动时的状态),最后再通过PID理论修正角度,从而达到直行的效果。
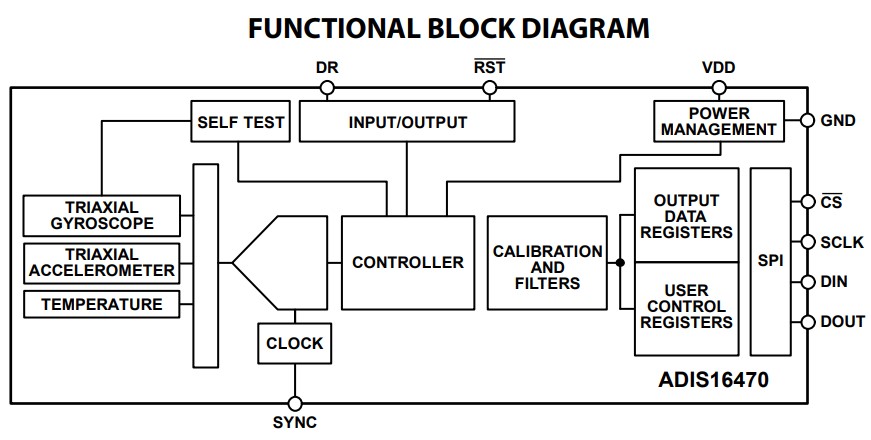
如上图,ADI公司的ADIS16470是一款完整的惯性系统,包括一个三轴陀螺仪和一个三轴加速计。ADIS16470 中的每个惯性传感器均结合了行业领先的 iMEMS技术和可优化动态性能的信号调节功能。工厂校准可表现每个传感器的灵敏度、偏置、对准和线性加速(陀螺仪偏置)特性。因此,每个传感器都有其自己的动态补偿公式,用以提供准确的传感器测量。
ADIS16470 能够提供了一种简单、经济高效的方法,用于将精确的多轴惯性测量技术集成到工业系统中,尤其是在与离散设计所涉及的复杂性和投资进行比较时。所有必要的运动检测和校准均已在工厂生产过程中完成,大大缩短了系统集成时间。在导航系统中,紧密的正交对准简化了惯性坐标系对准。SPI 和寄存器结构设有一个简单接口,用于数据收集和配置控制。ADIS16470 采用 44 引脚 BGA 封装,尺寸约为 11 mm × 15 mm × 11 mm。
小心陀螺仪漂移,高精度机器人的“致命伤”
大多数陀螺仪,包括 ADXRS450 和 ADIS16448 IMU 中的陀螺仪,产生一个输出,单位是度/秒。这是在特定时间单位t内旋转速率的度量。数值越大,机器人旋转得越快。因为陀螺仪不会简单地输出机器人已旋转的度数,它会在给定的时间段内读取数百个读数,如下图中的紫色、红色、绿色线条所示。
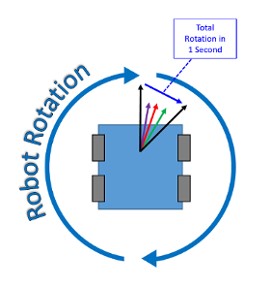
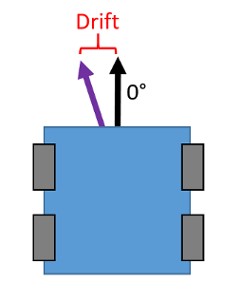
如果我们将这些读数加在一起,则最终会得到在设定时间段内(下例中为1秒)发生的实际角度变化。这个数学计算在 WPI 库中完成的。或对 IMU 来说,则是在代码中完成的。当首次启动机器人时,机器人放置的方向将被设置为0度。然而,由于没有任何陀螺仪是十全十美的,所以这个方向会随时间而漂移。
那么我们实际方向的角度如何获得?必须得将每个采样加起来。随时间推移,每个独立读数中的每个小误差都会累加起来。这些误差可能来自任何数目的不同内部和外部来源。对这种漂移影响最大的因素是陀螺仪的偏置稳定度规格,这是衡量陀螺仪在长时间段内测量结果稳定性的一个指标。如果将机器人开启一个小时并且不移动它,陀螺仪在一个小时结束时读取的数值将不可能是零。
何况测量总会存在误差,陀螺仪自身的误差产生也来源于各种外力干扰和温度变化。误差会导致用陀螺仪修正过的机器人在工作时左右摆动,走不出平滑的线,或者静止时会慢慢地自旋,这就是漂移现象。当然,这点误差对于地面机器人的影响可能不大,但是对于无人机或者其他精度要求超高的机器人来说,稍微有点偏差都很致命。
几种可行办法,解决误差“伤害”
由温度导致的飘移简称温漂,属于无法避免的静态误差,主要原因是内部测量器件会随着温度的变化而变化,一般有两种方法解决:
1、 硬件式:在陀螺仪旁边加一个大电阻进行加热,强制陀螺仪达到某一个温度,就可以保持恒温状态;
2、 软件式:先测量不同温度下的温漂情况,然后进行拟合和补偿,也就是温漂标定,使陀螺仪在不同的温度下有不同的拟合和补偿。
其它因素误差:
除了测量相对角度,还有传感器可以测量绝对角度(参考系设为大地坐标系)。我们可以用绝对角度和相对角度进行互补来矫正角度。
另一种传感器就可以帮助我们,它叫地磁计,相当于电子式的指南针,可以指出地磁场的方向。这种传感器测量的是自己与地磁场的角度,也就是绝对角度。
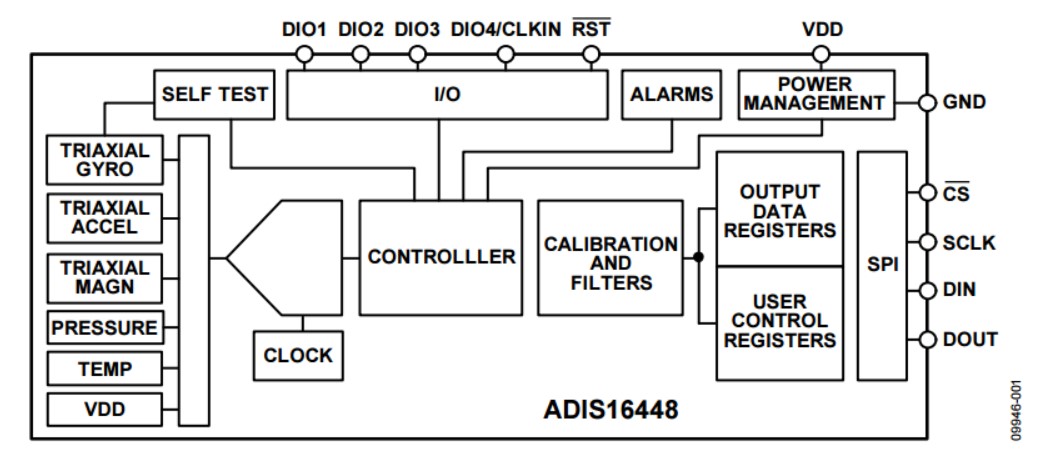
如上图的ADIS16448 iSensor是一款完整的惯性系统,内置一个三轴陀螺仪、一个三轴加速度计、一个三轴磁力计和压力传感器。每个传感器都实现了业界领先的iMEMS技术与信号调理技术的完美结合,可提供优化的动态性能。工厂校准为每个传感器提供灵敏度、偏置、对准和线性加速度(陀螺仪偏置)特性。因此,各传感器也都有其自己的动态补偿公式,可提供精确的传感器测量,能够将误差极大消减。
与复杂且昂贵的分立设计方案相比,ADIS16448为精确的多轴惯性检测与工业系统的集成提供了简单而高效的方法。所有必需的运动测试及校准都是工厂生产过程的一部分,大大缩短了系统集成时间。
结语
ADI公司的iSensor MEMS 惯性测量单元 (IMU) 传感器以多轴方式组合精密陀螺仪、加速度计、磁力计和压力传感器。惯性测量单元传感器即便是在极为复杂的应用和动态环境下,ADI的技术也能可靠地检测并处理多个自由度(DoF)。这些即插即用型解决方案包括完整的出厂校准、嵌入式补偿和传感器处理以及简单的可编程接口。在机器人动态平衡方向,ADI将凭借自己几十年成熟的系统级技术,不断突破技术创新,致力超越一切可能!
-
四足步行机器人的弯道行走2012-08-12 0
-
什么是工业机器人2015-01-19 0
-
nao机器人与其他机器人的区别2015-02-13 0
-
如何系统性地学习工业机器人技术?2016-03-06 0
-
什么是龙人四足机器人?2016-03-24 0
-
企鹅机器人是怎么样的?2016-03-29 0
-
核工业机器人特点及现状简述2017-08-07 0
-
工业机器人应用广泛2017-09-07 0
-
工业机器人的技术原理2018-11-23 0
-
解读机器人的几大避障技术2018-12-12 0
-
辅助行走的老人智能搀扶机器人设计2020-10-12 0
-
工业机器人仿真与编程2021-09-07 0
-
四足机器人的机构设计2021-09-15 0
-
设计一个能自由行走,并且可以与人语音对话的机器人2021-12-16 0
-
自制一个单独行走的机器人2022-07-13 0
全部0条评论

快来发表一下你的评论吧 !
