

工业机器人的逻辑编程教程资料说明
电子说
描述
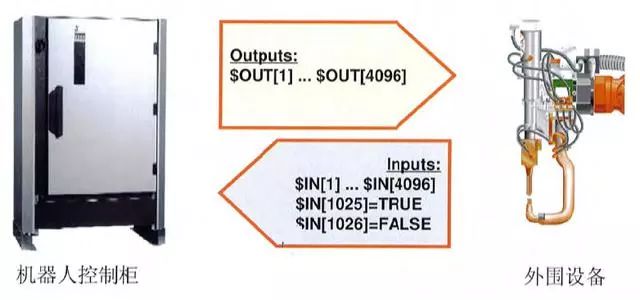
1、逻辑编程
输入输出的设置是为了机器人与外设设备的通信,例如工具传感器等
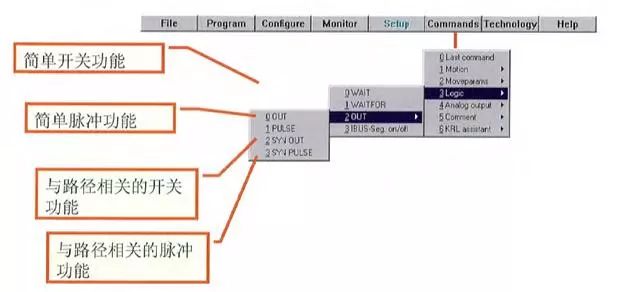
2、可用逻辑指令
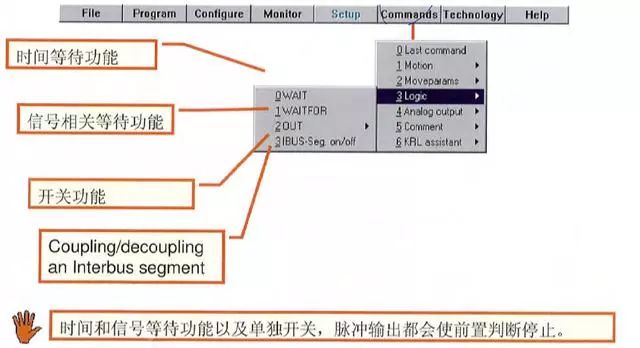
3、等待时间功能逻辑指令
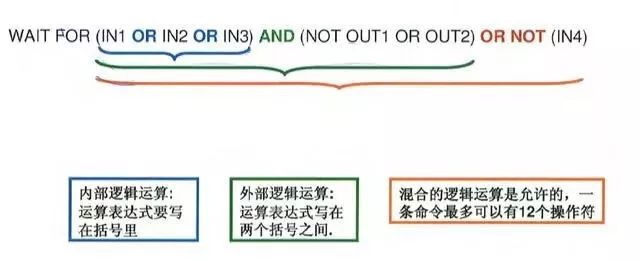
(2)等待信号程序可用编写,例如以下常用形式。
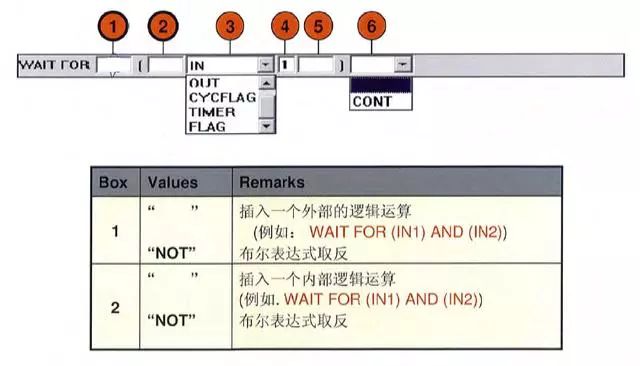
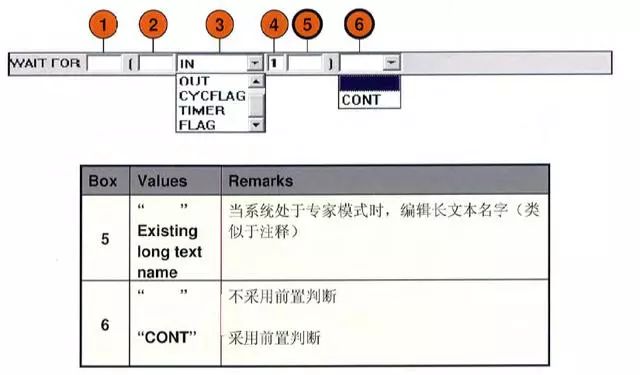
(3)如果“WAIT FOR”指令被选择,你们下列参数可以被设置
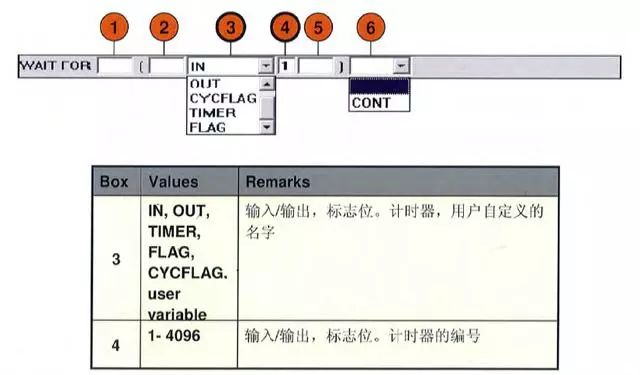
(4)如果“WAIT FOR”指令被选择,你们下列参数可以被设置
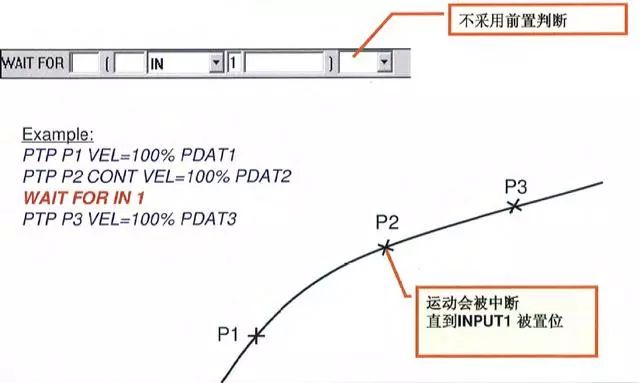
(5)如果“WAIT FOR”指令被采用打断前置判断的形式,每一个点都会精确达到即使条件已经满足。
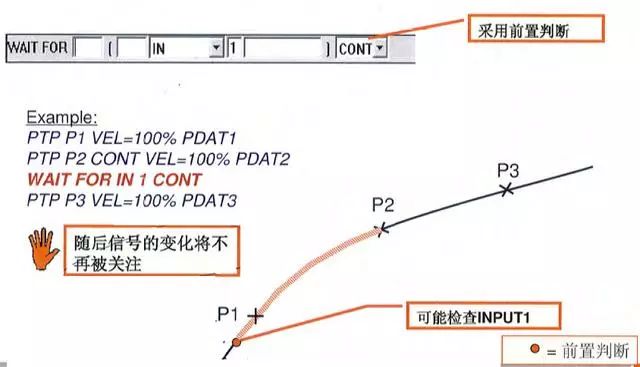
(6)如果“WAIT FOR”指令选择CONT模式,你们条件将会被前置判断,如果条件满足,那么就会采用逼近方式。
4、输出功能
(1)以下功能按选件可以被选择
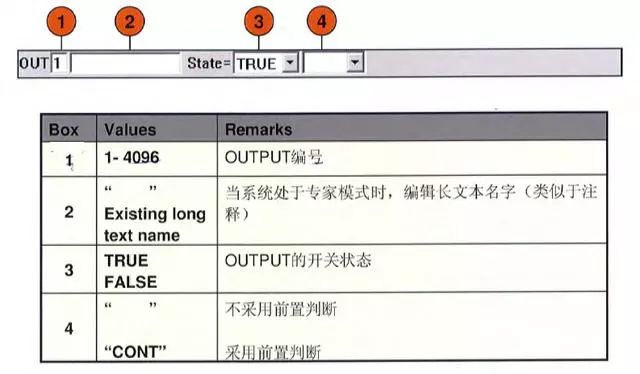
(2)简单输出指令一
如果“OUT"指令被选择,那么以下参数可以设置
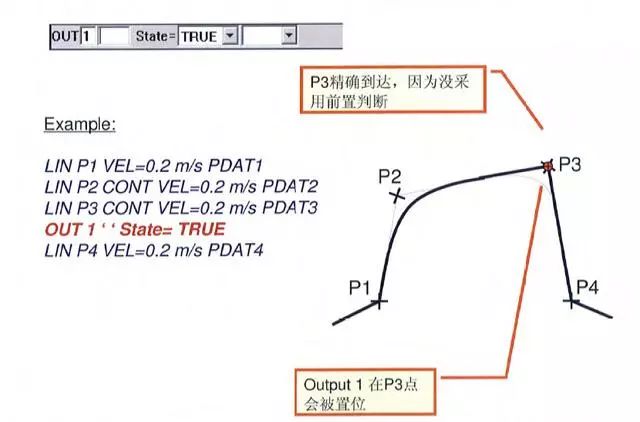
(3)简单输出指令二
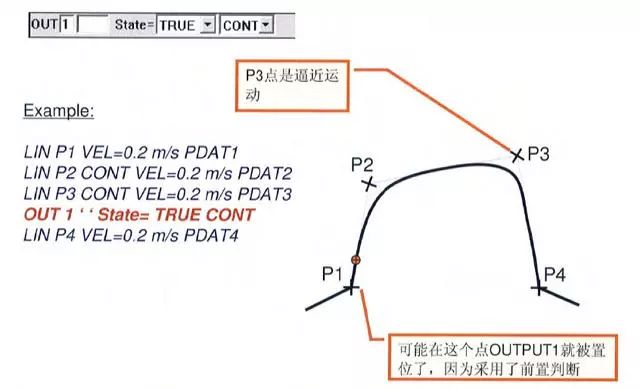
4)简单输出指令三
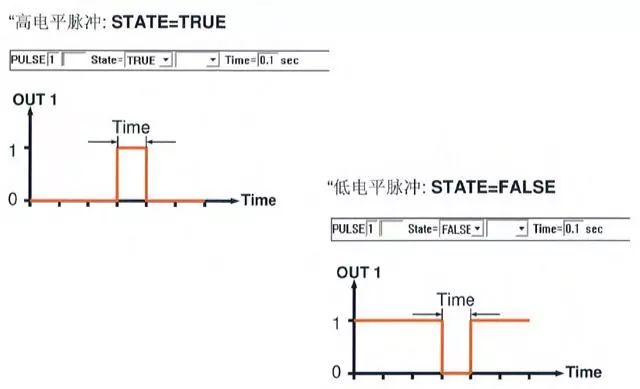
(5)、简单脉冲指令一
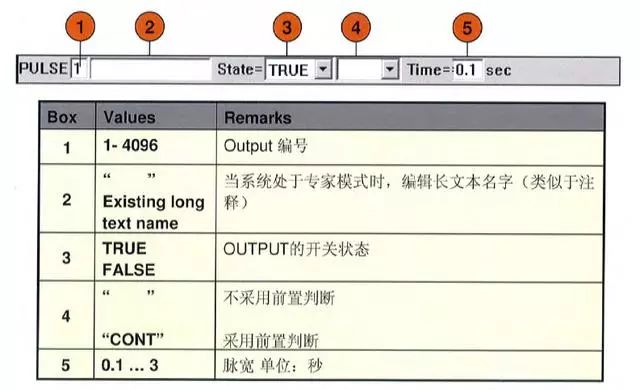
(6)简单脉冲指令二
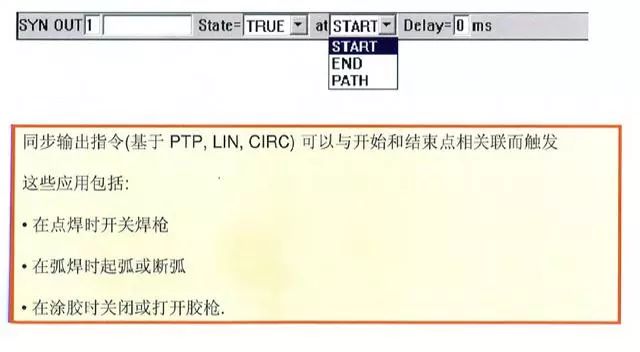
5、同步输出指令
6、信号输出
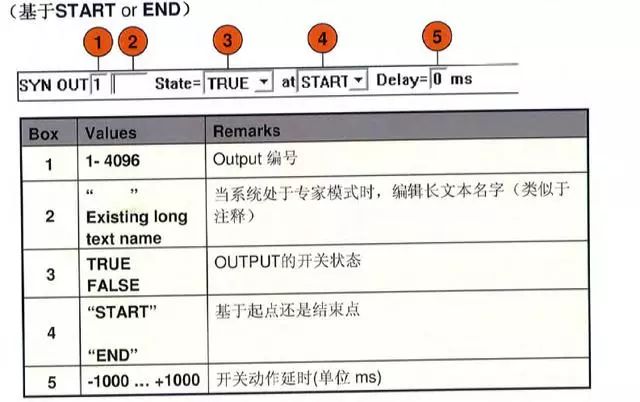
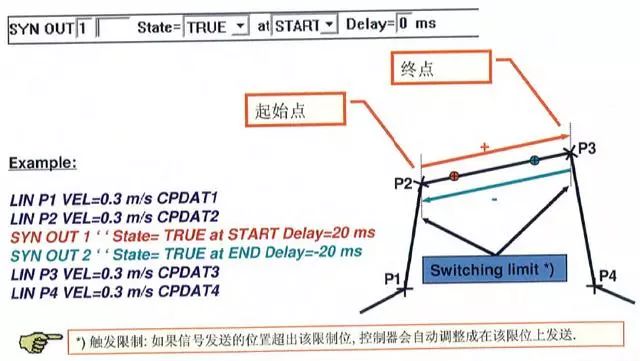
(1)在路径开始或者结束处输出信号一
如果"OUT"指令被选择,那么以下的参数可以设置
(2)起始点和结束点都精确到达
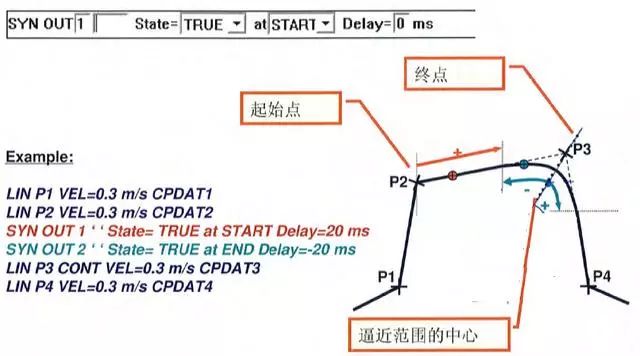
(3)起点精确到达点,终点是逼近点
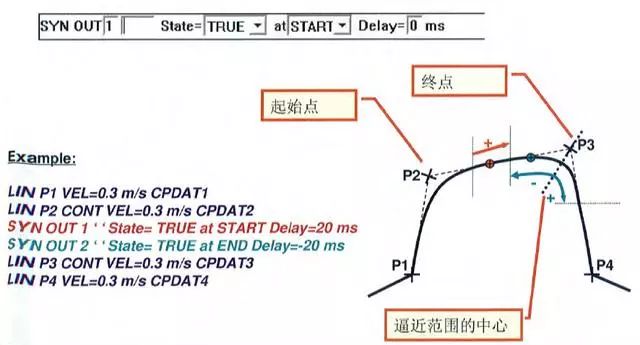
(4)起始点和结束点都逼近点
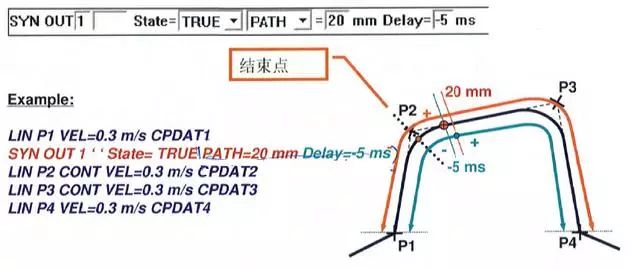
(5)在路径如何位置输出信号
a、如果你使用路径相关的SYNOUT-PATH命令,你可以沿着程序路径上的
知道距离的任意点触发开关量。
b、和起始结束点相关同步指令一样,这种指令也可以提前或者延迟发送
信号。
c、路径相关的开关量控制只是被允许用在连续路径运动中(LIN 或者 C
IRC)。
d、SYNOUT-PATH指令是针对下一个运动指令而言的。
e、如果一个SYNOUT-PATH命令运用于一个PTP运动,那么运动执行时会被
软件拒绝。
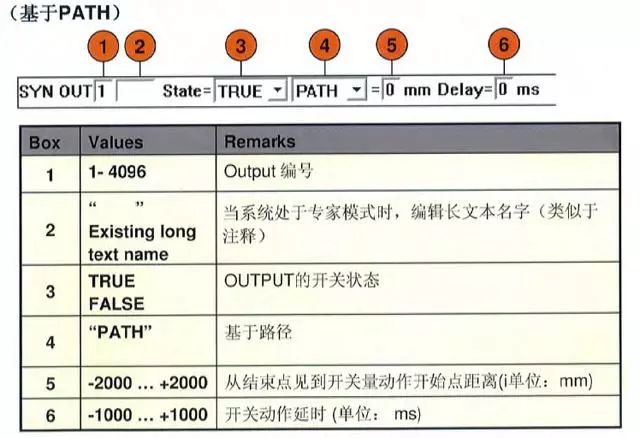
(6)路径相关同步输出指令一
如果“OUT”指令被选择,那么以下参数可以设置
(7)路径相关同步输出指令二
起始点是精确到达点,终点是逼近点
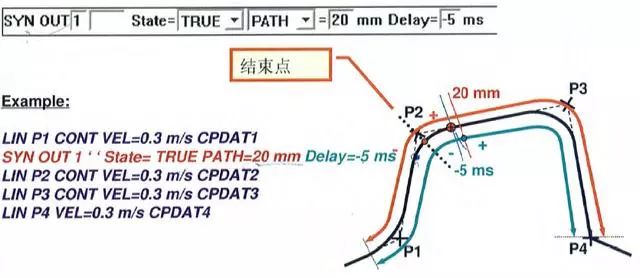
(8)路径相关同步输出指令三
起始的和结束点都是逼近点
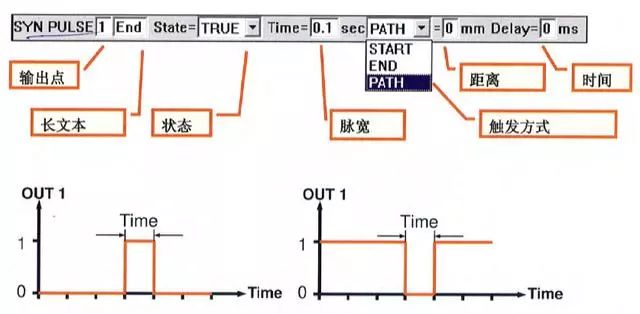
7、同步脉冲指令
如果“SYN PULSE”被选择,那么以下参数可以设置
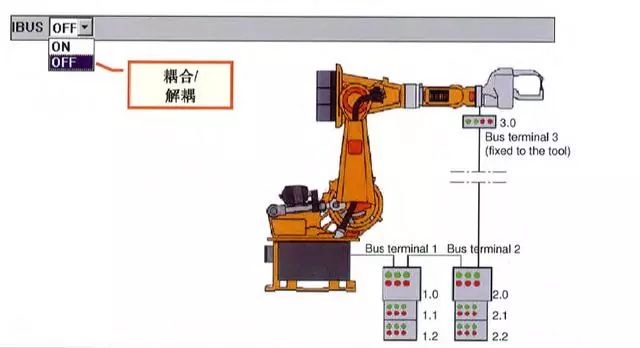
8、Inter bus 部分耦合和解耦
如果“IBUS-seg.on/off ”被选择,那么以下参数可以设置
-
工业机器人的基本结构2015-01-19 0
-
什么是工业机器人2015-01-19 0
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 0
-
六轴工业机器人的主要特点2017-08-08 0
-
工业机器人应用广泛2017-09-07 0
-
零基础玩转工业机器人2018-10-29 0
-
工业机器人的技术原理2018-11-23 0
-
工业机器人应用编程考核设备分享2021-07-01 0
-
工业机器人综合实训平台实验2021-07-01 0
-
SCARA工业机器人相关资料推荐2021-07-01 0
-
FANUC 工业机器人编程与联网相关资料推荐2021-07-02 0
-
工业机器人组成结构相关资料分享2021-07-05 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
工业机器人仿真与编程2021-09-07 0
-
PDF——工业机器人技术及应用2022-10-16 0
全部0条评论

快来发表一下你的评论吧 !
