

车联网大数据:发展、支撑与应用
电子说
描述
智能交通是自动化领域研究的热点方向之一,小编整理了IEEE/CAA Journal of Automatica Sinica和《自动化学报》近期发表的智能交通文章,欢迎阅读~
1.加拿大滑铁卢大学沈学民(Sherman Shen)教授:车联网大数据:发展、支撑与应用(Internet of vehicles in big data era)
随着智能交通向更安全、更高效、自动化、可娱乐的全方位发展,车载环境下的信息技术,包括卫星网络、高空平台、无人机、地面网络、车载社交网络以及车载传感器网络,近年来都得到发展,其平台数据的交互与应用也逐渐受到通信和控制领域学者们的关注。
加拿大滑铁卢大学沈学民 (Xuemin Sherman Shen) 教授等在IEEE/CAA Journal of Automatica Sinica发表的综述“Internet of Vehicles in Big Data Era”中,探索与分析了车联网与大数据之间的关系。一方面,车联网可支持信息平台中的海量数据获取、传输、存储与计算;另一方面,基于车联网大数据的分析与挖掘,有助于进行更加高效智能的新一代车联网架构与设计。
此外,沈学民教授等还探索了无人驾驶环境下的大数据应用,同时 展望了未来车联网大数据的相关研究方向,包括如何有效设计车联网支持日益增长的数据量、如何利用海量的数据进行分析与发掘,设计更智能高效的通信协议以提高驾驶安全与驾驶体验。
文章导读
车联网与大数据的关系为(图1):首先,车联网需要支持大数据的获取、传输、存储与计算;同时,通过对大数据内在价值的有效利用,车联网的架构与设计可以进一步得到优化。
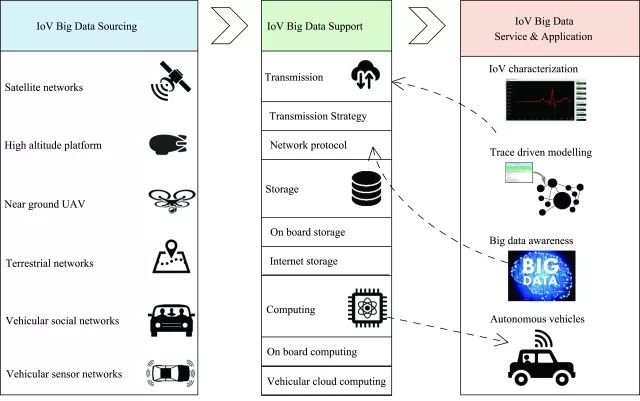
图1 车联网与大数据
综述内容如图2 。在大数据支持部分,首先介绍了大数据的获取,分别包括车内与车外的数据来源。车内数据源包括车载传感器监控的车辆状态信息,如速度、加速度、引擎及刹车状态等;乘客智能终端的GPS、加速度传感器、陀螺仪等感知的运动状态信息。车外数据源包括路侧基础设施、高空平台、无人机等监控的环境信息,如车流、红绿灯、天气等。
大数据传输部分介绍了应用感知的传输策略、媒体访问控制协议、路由协议以及空中扩展信息平台。大数据存储部分介绍了存储类型(车载存储、路边存储、网络存储)、相关存储机制等。大数据计算部分介绍了基于车车通信的在线计算以及车载云计算等。
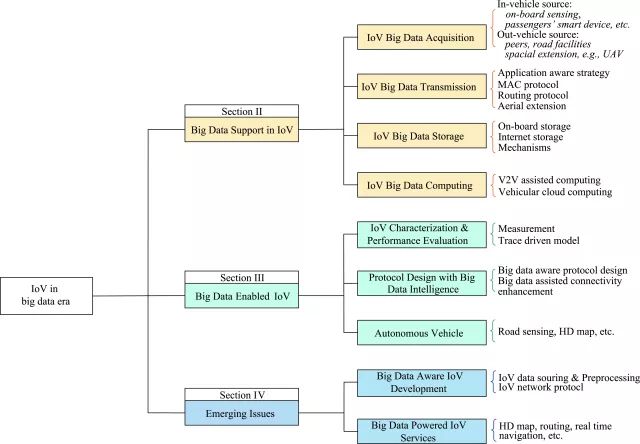
图2 综述内容
支持大数据传输的车联网框架(图3)包括: 1) 基于DSRC和LTE-V通信协议的地面通信,例如,车辆与车辆(V2V)通信、车辆与行人(V2P)通信、车辆与路侧基础设施(V2R)通信等; 2) 卫星、高空平台、无人机等空间平台与地面车辆的空间地面通信; 3) 卫星、高空平台、无人机之间的空间通信等。
在这些通信模式中,基于车载应用,作者综述了应用感知的传输策略、媒体访问控制协议、路由协议以及空间传输协议的设计。例如,在媒体访问控制层 (MAC)中,目前用于车联网的MAC层协议根据访问无线网络资源的方式不同主要有两类 :
1) 基于竞争 (contention-based)的MAC, 即当节点有数据要传输需要访问无线信道时,它首先会监听信道是否空闲,当信道空闲时立即发送数据,在发送数据的同时监听是否有冲突产生,若产生冲突则立即停止数据发送,等待一段随机时间,再重尝试发送;
2) 非竞争 (contention-free) MAC, 即信道按照某种预先规定的机制进行划分比如时分复用 (TDMA: Time Division Multiple Access)、空间复用 (SDMA: Space Division Multiple Access)、码分复用 (CDMA: Code Division Multiple Access),每个节点被分配唯一的无线资源以减少冲突。
作者对两类MAC协议设计的研究现状都进行了综述。此外,支持大数据存储介绍了存储类型(车载存储、路边存储、网络存储)、存储机制等。最后,支持大数据计算介绍了基于车车通信的在线计算以及车载云计算。
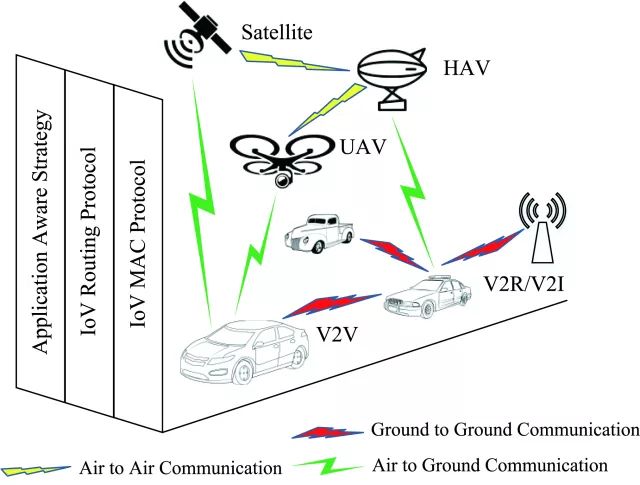
图3 车联网支持大数据传输框架
虽然不断增长的数据量给车联网带来挑战,但是通过分析与挖掘大数据,高效智能的新一代车联网架构与设计也会得到优化与发展。
主要从三方面介绍了车联网大数据的应用方向:
1) 基于大数据的网络特征刻画与验证
节点的高速移动造成车载网络连接的时变性,且变化难以预测。即使为所有节点动态分配好无线带宽资源,节点发送出去的消息也可能因为链路质量问题而不能被邻近节点成功接收。基于真实场景下的大量通信数据,结合车辆的状态和周围环境信息,可进行定量分析,即通信质量与运动速度、距离、高度、环境等因素之间的关系,分析结果将对不同应用需求的通信场景起到指导作用。
2) 情景感知的通信范式设计
由于节点移动速度和路线都在异态变化,导致局部网络拓扑可以发生十分剧烈的改变。此外,宏观车流、人流密度的变化,进一步加剧了网络拓扑的高动态性,基于运动状态,环境监测数据,可设计情景感知的通信协议,可最大化网络性能的同时最小化网络开销。
3) 大数据支撑的无人驾驶
无人驾驶场景下数据来源包括车传感器、GPS、摄像头、激光雷达、用户体验数据(游戏数据)、边缘数据、众包数据等,结合网络传输共享、本地及云平台的计算能力提供基于高精地图的安全应用、导航、无人驾驶、车载社交网络、娱乐休闲等应用。
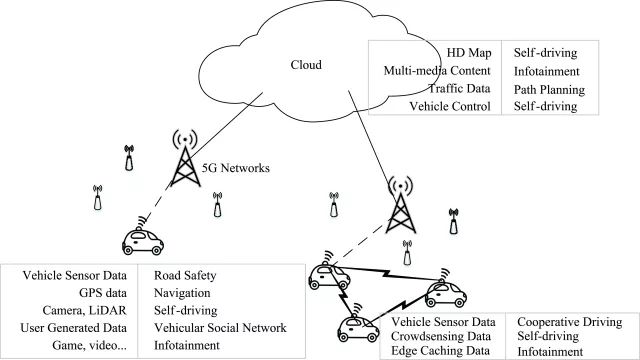
图4 大数据支撑的无人驾驶
2.平行驾驶:基于信息物理社会系统(CPSS)的交通自动化与汽车智能化统一融合框架
Parallel Driving in CPSS:
A Unified Approach for Transport Automation and Vehicle Intelligence
文章导读:
智能网联汽车的迅速发展为当前的车辆控制和交通系统提出严峻的挑战。本文提出智能网联汽车的一种全新的基于云端化的信息物理社会系统(CPSS)解决方案,平行驾驶。
本文首先介绍CPSS定义和基于人工社会(Artificial societies)、计算实验(Computational experiments)和平行执行(Parallel execution)智能机器系统。随后,提出了基于CPSS的平行驾驶框架,融合物理世界、精神世界和人工世界,并详细论述了平行测试、平行学习以及平行增强学习等方法,它们在智能网联汽车的感知、决策与规划和控制等关键模块中都有巨大的应用潜力。
受到平行系统思想的启发,在智能视界及其应用实例的基础上,本文提出了平行视界的概念。平行驾驶旨在为涵盖不同自动化层级的智能网联汽车系统和未来智能交通提供一套智能融合解决方案及框架。
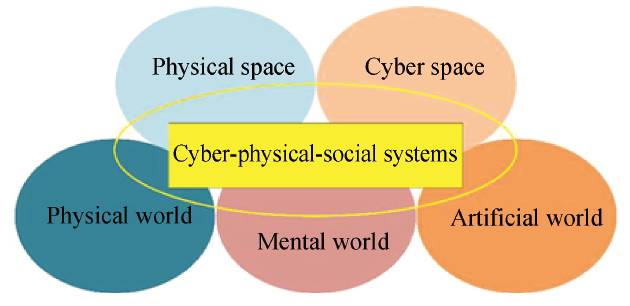
图1 CPSS的定义以及信息、物理和社会系统之间的相互联系
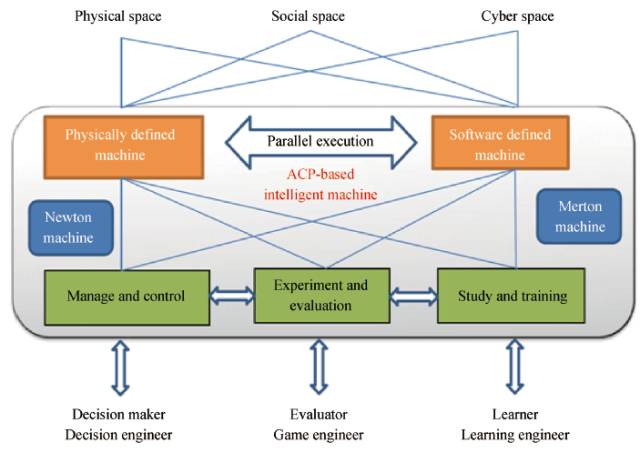
图2 基于ACP方法的智能机器系统框架. A:人工社会,C:计算实验,P:平行执行
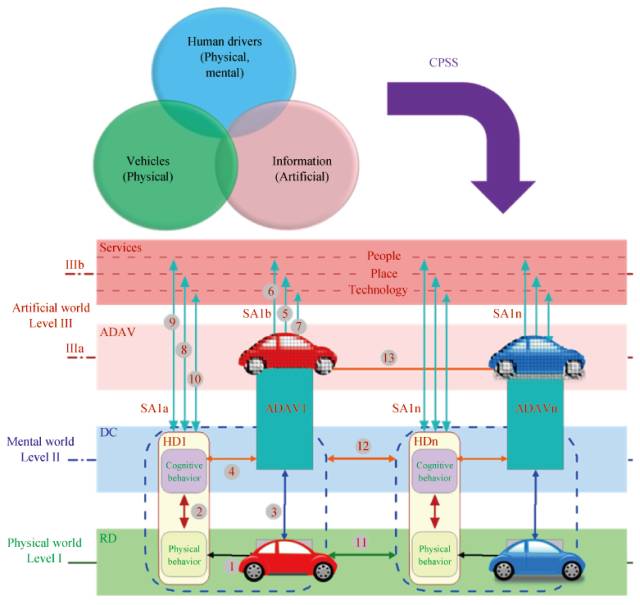
图3 基于CPSS的平行驾驶框架. RD:实际驾驶,DC:驾驶员识别,CPSS包含三大组成部分:人(社会维度),位置信息(地理维度)和技术(传感器、物联网等). HD:人类驾驶员,RV:实际车辆,ADAV:人工驾驶员和人工车辆,SA:态势感知
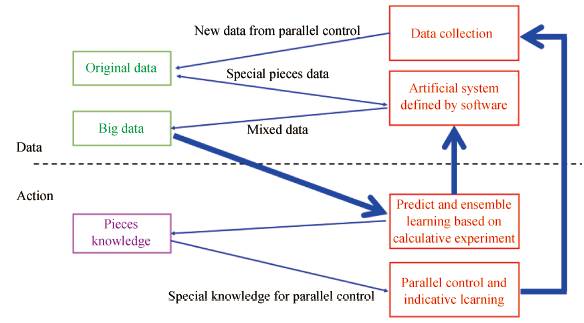
图4 平行学习框架,主要包含数据处理和行动学习两大阶段
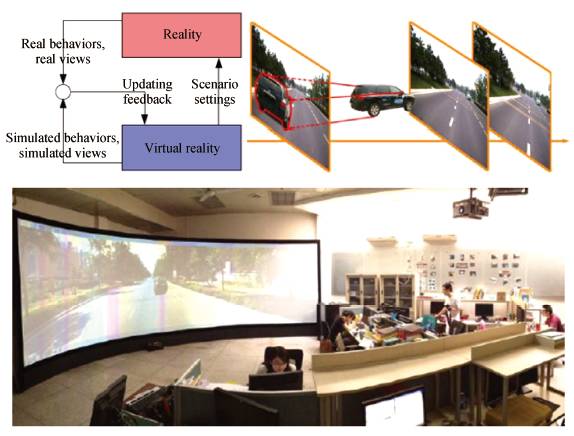
图5 平行测试的实现过程和一个实例
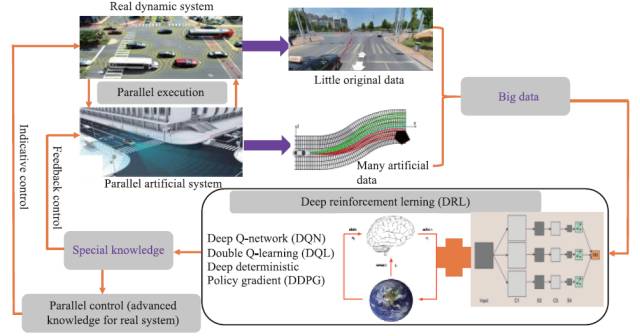
图6 平行增强学习理论框架. 主要包括数据收集及生成过程、数据处理及最优策略的计算过程、特定知识的应用过程
图7 平行视界框架,主要包括三大模块:1)驾驶风格识别模块,2)短期速度预测模块,3)基于周期视界的长期速度预测模块
3.
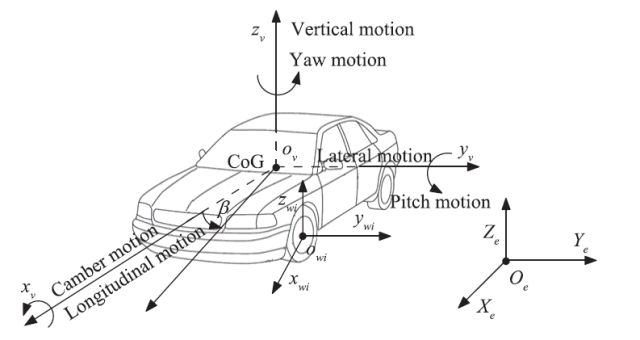
郭洪艳,曹东璞,陈虹等:车辆行驶状态研究现状及展望
来自吉林大学、加拿大滑铁卢大学、英国克兰菲尔德大学的郭洪艳、曹东璞、陈虹教授等发表在IEEE/CAA Journal of Automatica Sinica 2018年第2期的综述“Vehicle Dynamic State Estimation: State of the Art Schemes and Perspectives”中,针对下一代汽车控制及未来自动驾驶汽车需要的车辆行驶状态信息,系统地回顾了研究进展并对未来车辆行驶状态估计亟待解决问题进行展望。首先给出车辆行驶状态的分类并总结了车辆行驶状态估计所采用的结构。其次,系统地介绍了车辆速度、质心侧偏角、横摆角速度及侧倾角估计的传感器配置方案;再次,总结了车辆行驶状态估计中所使用的典型方法及车辆模型;最后,讨论了未来车辆行驶状态估计中亟待解决的问题。
文章导读
随着自动驾驶、平行无人系统、控制与计算机科学、智能交通系统(ITS)、驾驶辅助系统(ADAS)等的快速发展,消费者对车辆操纵稳定性和主动安全性要求日益提高。各种ADAS和车辆稳定性控制系统也应运而生,如基于车辆纵向控制的防抱死制动系统(ABS)、自适应巡航系统和牵引控制系统;涉及侧向稳定性的电子稳定程序(ESP)和主动前转向(AFS); 强调车辆垂向控制主动悬架控制(ASC)等。在这些系统的帮助下,车辆的操纵稳定性和主动安全性得到了有效的改善,因此,车辆的行驶变得更加安全,致命事故的数量也减少了。
然而,这些汽车稳定控制系统的实现,特别是智能网联车辆和自动驾驶车辆,依赖于精确的车辆动态状态信息。传统上,车辆动态状态信息是由车载传感器直接测量的。然而,由于运行条件极其复杂,这些传感器的精度相对较低,不满足车辆主动安全控制系统的要求。若加装高精度传感器,其成本又过于昂贵,不适于在量产车辆上使用。因此,现有车载传感器的低精度问题和一些传感器的高昂价格已经成为获取精确、完整的车辆动态状态信息的瓶颈,并极大地限制了ADAS和车辆主动安全系统的发展。基于此,车辆行驶状态估计应运而生,并可以为ADAS、主动稳定控制和车辆故障诊断系统获得更准确、更可靠的车辆行驶状态信息。因此,对于车辆动态状态估计的研究很有必要并且国内外相关的文献越来越多。
因此,本文回顾了车辆行驶状态估计的最新研究进展,并给出了车辆行驶状态估计问题的分类。然后,总结了车辆行驶状态估计中所使用的典型方法及车辆模型。最后,讨论了未来研究中车辆动态状态估计亟待解决的问题,以及在智能驾驶以及大数据、云计算的大背景下车辆行驶状态估计的研究展望。
4.训练数据,激发潜能:利用虚拟图像训练和测试目标检测器
针对目标检测模型建立过程中,真实数据可控性差和多样性不足的问题,王飞跃教授团队提出了通过创建虚拟数据来对模型进行训练和测试的思路。在公开数据集PASCAL VOC、MS COCO和KITTI上进行了实验,证明了虚拟数据在提升目标检测模型性能和对模型进行有针对性测试方面的有效性。
文章导读
目标检测技术是计算机视觉领域的研究热点之一,在安防、智能交通等领域有着广泛应用。随着机器学习的兴起,基于传统机器学习算法和深度神经网络模型来构建目标检测器获得了诸多进展,也对训练和测试数据提出了更多要求。尤其是在像智能交通这样的复杂场景中,依靠单一样本训练的模型往往难以在实际中取得成功,同时,没有经过多样化测试数据充分测试的模型,在应用中也存在着巨大的安全隐患。
由于真实世界的不可控性,收集大规模、多样化的真实数据存在着较多困难,数据收集工作处于较为被动的地位,在很多时候,无法得到令人满意的结果。此外,数据标注也是一件费时费力的工作,尤其是对海量数据进行多种信息的标注,在耗费巨大人力物力的情况下,也时常无法保证标注的精确性。
近些年,伴随着计算机图形学、虚拟现实等技术的发展,通过游戏开发引擎等工具来搭建逼真的虚拟场景,进而展开各种科学研究逐渐引起人们的重视。相比于真实世界,虚拟场景在可控性方面有着巨大优势。我们可以借助计算机图形学软件提供的指令和接口对场景参数进行改变,来满足个性化的需求。此外,由于虚拟场景的生成建立在数学模型的基础上,因此可以利用图形学机理来对感兴趣信息进行获取,从而解决像数据标注这样的棘手问题。
本文对虚拟数据集创建方法进行了研究,面向目标检测任务,对虚拟数据在训练和测试中的有效性进行了验证。首先借助OpenStreetMap、CityEngine和Unity3D等软件,搭建了虚拟城市交通场景,并通过改变场景参数,收集了不同天气、不同光照条件下,具有不同遮挡程度和目标大小等特点的多样化数据集;然后,通过结合虚拟数据和真实数据对目标检测模型进行了训练,提升了目标检测模型的性能;最后,利用定制的虚拟数据,对训练好的模型进行了测试,探索了虚拟数据在对模型进行精细化测试方面的潜能。

虚拟数据集建立及模型训练和测试流程
-
2018年车联网的发展现状和发展机遇解读2018-01-23 0
-
车联网现阶段的组成部分2020-10-22 0
-
大数据与物联网如何相互协作2020-10-22 0
-
工业大数据和互联网大数据区别2019-03-28 10817
-
电梯物联网大数据平台怎样让救援更有效2019-07-20 1010
-
物联网大数据平台具备的特点2019-08-26 3879
-
互联网大数据和物联网大数据到底有什么不同之处2019-12-07 5807
-
互联网大数据有哪些应用价值2020-02-12 5153
-
工业互联网大数据有什么新的机遇2020-03-17 621
-
加强工业互联网大数据软件建设2020-04-15 3162
-
浅谈打造泛在电力物联网大数据平台2023-06-01 404
-
【节能学院】浅谈打造泛在电力物联网大数据平台2022-10-25 351
-
电梯物联网大数据平台是什么意思?2023-11-23 375
-
诚邀报名|黄向东邀您共话开源工业物联网大数据2023-12-05 356
-
开源工业物联网大数据分论坛圆满举办2023-12-20 352
全部0条评论

快来发表一下你的评论吧 !
