

波士顿动力机器人十年进化史
电子说
描述
波士顿动力发布最新视频十条SpotMini机器狗在公路上拖动了一辆卡车,其是波士顿动力研发的四足机器人,计划于2019年开始量产及销售。
奔跑,跳跃,后空翻。
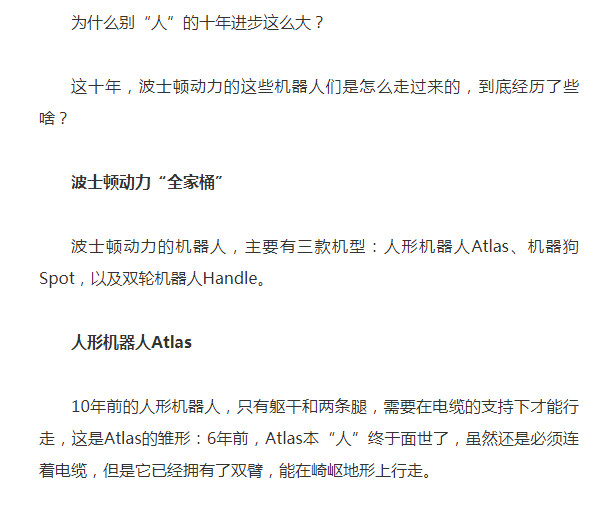
看多了波士顿动力机器人的特技演出,我们已经很难想象它十年前的样子。
2017年11月,Atlas学会了跳房子。
还能后空翻。
去年5月,Atlas在一片大草地上自由自在的奔跑。
还练习了一下立定跳远,稳稳地跳过了一根木头。
五个月之后,Atlas的运动能力巨幅提升,秀了一波跑酷。一步步小跑,顺势跳过了地上的圆木。
还像人类一样很淡定的跳上了三层高台,左脚右脚交替,非常娴熟的驾驭自己的身体。
四条腿的机器狗Spot
“十年”,对四条腿的机器狗系列来说更为意义重大。
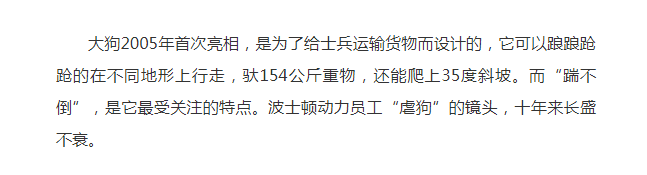
波士顿动力的四足“大狗”BigDog引爆网络,就是在2009年1月。
一个月后,“小狗”出现了,能稳稳地行走在石滩上。它看起来其实更像昆虫,不过官方设定是“Little Dog”。
接下来,狗系列向着外形越来越精致,技能也越来越丰富的方向发展。
大狗三年后适应了更加复杂的地形:
再过一年,它又学会了伸长脖子来搬东西,不过官方说,那其实是一条“胳膊”:
我们现在熟悉的Spot系列,正式面世则要等到2015年了。当时的Spot样子有点丑,体重73公斤,可以淡定的在办公室里走来走去,爬山遛弯。
2016年,小型版来了:SpotMini,体重大约是Spot的1/3。
又过了一年多,SpotMini换了一身黄色的新衣服,还缩短了脖子。变身后的机器狗不再工业风,似乎已经准备好进入人类的世界。
去年2月,Spot学会了用“嘴”开门。去年5月,Spot学会了认路,自动规划路线,自动“驾驶”。
这个版本,去掉了开门的“脑袋”。去年10月,Spot就去工地“实习”了,去东京当起了工地检查员,通过自主导航在工地里爬上爬下:
另外,Spot不只会工作,还学会了跳舞,舞姿风骚,还十分有韵律感。旋转,跳跃,太空步不停歇:蓦然回首,那人却在看我扭屁股:
双轮机器人Handle
2017年,波士顿动力发布双轮机器人Handle,它被设计成物流仓库里的“搬砖”工。可以自由的“滑旱冰”
旋转姿势非常优雅拥有强劲的跳跃能力
当然,还必须会搬东西。
就在上个月,Handle更新了,现在,它可以用“脑袋”上的吸盘抓起快递箱,用两个轮子形状的“脚”前后移动、转弯,以此配合来将物流仓货物箱子们按需求搬运。
波士顿动力透露,新Handle可以搬运13.6公斤的箱子,动图里用的是5.4公斤的箱子。堆叠箱子的深度可达1.2米、高度可达1.6米。
-
 祝瑞祥
2019-04-26
0 回复 举报当时我们自动化概论课就是这个,从追求速度、探索地表到多方面应用,感触良多,谢谢博主 收起回复
祝瑞祥
2019-04-26
0 回复 举报当时我们自动化概论课就是这个,从追求速度、探索地表到多方面应用,感触良多,谢谢博主 收起回复
-
波士顿动力公司机器人的进化硬创客 2021-09-10
-
波士顿动力全新轮式机器人 #波士顿动力#机器人#科技 #奔跑的小鑫 2022-09-23
-
波士顿动力公司最新军用机器人力作——斑点2015-03-04 0
-
机器人的关节结构是怎样设计的?2015-03-09 0
-
倒下后能自立的行走机器人:可避障导航搬货物2016-02-25 0
-
足式机器人经典资料2017-12-11 0
-
无法想象,波士顿动力“机械狗”将被量产2018-11-21 0
-
波士顿动力机器狗大跳韩团舞2021-11-10 0
-
波士顿动力机器人又进化了!2018-10-13 3531
-
浙大的机器狗“绝影”成功逆袭波士顿动力机器人2020-01-11 3063
-
最早的波士顿动力机器狗ASV介绍2020-09-15 3761
-
波士顿动力机器狗学会跳舞2020-12-30 1919
-
波士顿动力机器人组团跳舞:跳舞背后的原理是什么呢2020-12-30 12995
-
波士顿动力机器狗可以帮助整理房间2021-02-02 1505
-
波士顿动力机器狗又新增功能:跳绳2021-02-02 1784
全部0条评论

快来发表一下你的评论吧 !
