

L车改装浅析及性能测试
电子说
描述
明天就五一了,祝各位辛勤劳动调车的车友们节日快乐,也要给自己放个假,主要是给不断被你折腾的小车放个假,然后去看个电影“复仇者联盟4—终局之战”,快哉!
放假之前呢,还是和大家聊聊上期预告过的L车改造。之前的帖子里提到过关于室外越野组车模选择,根据该组别的比赛任务,我们推荐使用L车。由于需要适应比较复杂的路况,包括草地、≤2CM硬质路坎、沙坑、≤2CM水坑等,车模的减悬挂和底盘高度尤为重要;同时由于车模变长,轴距变长,比传统车模需要的转弯半径更大,需要满足高速通过80CM最小转弯半径;另外呢最基本的编码器安装也带来了改进方案;所以今天讨论的三个重点来了,编码器安装、减震悬挂改造及转向改造。
测试平台搭建
为了动态性能测试的方便,我们用LPC54606搭建了一个遥控L车来进行测试。使用逐飞的LPC普通组主板+LPC核心板+MOS单驱搭建的测试平台对车模进行控制。通过采集接收机的PWM占空比信号,解析出遥控器的动作。并使用LPC控制电机以及舵机动作。如下图:
由于L车采用了四轮驱动的方式,中间有传动轴作为传动装置,直接导致了底板空间被一分为二,并且竖向安装的电机、舵机和电池,占用了几乎全部底板空间。
所以如果参赛选手想要将PCB固定在车体上,可能需要借助于传动轴上方的保护架,同时还起到抬高防止电路板泡水的作用。我们的L车测试平台采用了二楼板+铜柱的方式将LPC主板以及单电机驱动固定在车体上,二楼板用薄密度板按照固定架孔位钻孔并用电工胶带缠绕包裹。
不过考虑到室外越野组的环境可能存在有水的情况,建议用其他材质(如玻纤板,亚克力板)代替不防水的材料。(如下图所示):
L车编码器安装
由于L车并未提供编码器固定位,所以为了实现测速及闭环控制,逐飞原创了一种编码器固定架+联轴器的方式实现测速。(之前的帖子里有提到,友商们很快也复制了这种方案,友商的复制说明这种方案得到了友商的认可,感谢认可!)。
但是在测试过程中,我们发现旧款铜制硬连接联轴器由于安装精度的问题,很容易造成不同心的问题,导致编码器要承受非常大的抖动。容易造成轴承松脱及损坏,为了解决这个问题,我们推荐使用新款万向节联轴器,由于万向节联轴器可以允许很大程度上的安装误差,非常显著的改善了编码器抖动的问题,同时我们也主动为已经购买了旧款铜制硬连接联轴器的车友们提供了免费更换为万向节联轴器的服务(更换前后对比如下图)。
L车减悬挂改造
由于越野组的赛道环境复杂,如果出现坡道,或小台阶等可能导致车体跳起的路段,如果车辆的悬挂调教不当,可能会导致车体弹跳,如果在速度很快的情况下,弹跳可能导致车辆姿态异常,导致难以寻迹或降低车速。
可能是由于个例,刚开始我们拿到的这台L车车模的时候,4个轮子的悬挂非常紧,不但难以被压缩,卸力后回弹速度也非常之慢。几乎完全丧失了独立悬挂的特性,所以必须加以改造。经排查,基本确定两个因素导致悬挂过于僵硬。
1、悬挂下摆臂转轴的部分被固定的过于紧密(见下图)。由于弧形的盖子直接压住下摆臂转动部分,没有足够的间隙转动,导致下摆臂阻力过大。
2、液压避震器的阻尼过大。一只良好工作的避震器应该可以被快速压缩并以一定的阻尼缓速回弹。但原厂未经调教的避震器在使用时无论压缩还是回弹都过于迟缓。解决的办法是调整下图中标注的部分。将此处的固定环拧松,可以很大程度上解决避震器阻尼过大的问题。
也可以将避震筒内的避震油更换为流动性更好的避震油(比如逐飞小店里的),以更大程度上减小回弹阻尼。(见下图,注意在拆开避震筒顶盖时,可能会有油液流出)。避震器的完全拆解图如下。
转向改造
由于L车轴距长,转弯半径大,但其本身原装的转向幅度较小,同时原装连接球头也有些不牢靠,我们在测试的时候曾因为撞击直接将前转向连杆蹦出。所以前轮转向最大化基本是必需做如下改动。
原车模前转向球头用的是活扣,如果拉杆受力形变比较大,就容易蹦出来,这也是为什么原车会把靠近车轮的球头放在下边,放在上边会很容易蹦出来,但放下面连接造成拉杆的角度太大,改装成下图所示,改用逐飞的塑料球头连接,用螺帽固定,拉杆角度更合适,同时没有蹦出的风险。需要把原来球头取掉,孔扩成3mm的,用3*16的螺钉来连接固定,换两个新的球头,原来的拉杆可以继续使用。
同理,舵机的摆臂拉杆也需要做同样的球头更换,中间的金属拉杆可以用原来的,两头换成逐飞的球头,同样用螺钉固定连接,如下图:
如果想尽量大的增加前轮转向角度,就需要去削除一些阻碍转向臂转动的位置,保证转向大且顺畅,同时不能削得太多导致车模塑料连接件强度够,这个度就需要根据自己的控制需求把握了,削除位置如下图:
当然,说到转向改造,就不能不提前段时间在卓老师公众号上出现过的前后轮联动改造方案,我们也做了类似的改造并进行了飙车测试,整体效果如下图:
改造过程详解
第一步:舵机摆臂这里需要两边各固定一个球头,右边这个球头连接长拉杆,带动后边的转向系统,所以需要将原来的球头换成长螺丝,用螺帽将两边的球头锁死。
第二步:固定后轮的拉杆需要拆掉,更换成可以左右活动的结构,但是该拉杆靠近齿轮那端,拆起来比较复杂,一定要特别注意结构和顺序,以免拆了无法还原。
第三步:如下图所示,将用于固定转动装置的固定板先固定在车身上,需要先打好对应的孔位。装上两边联动的旋转结构。
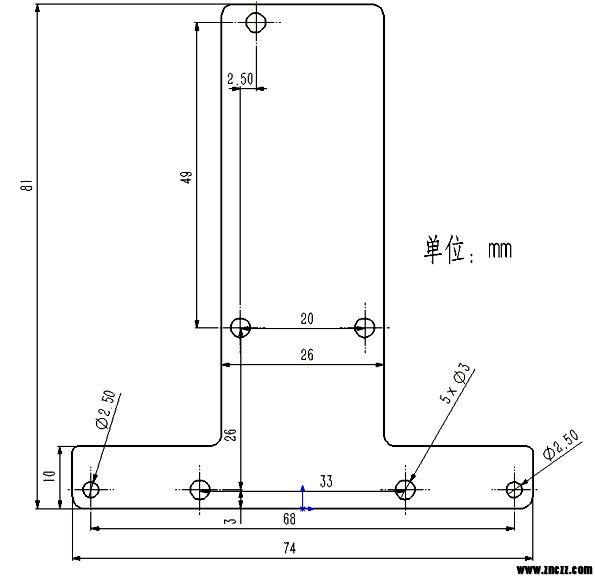
固定板的低成本解决方案是用PCB做,选择2MM的厚度,两面敷铜,增加固定板强度,固定板的尺寸和孔位可参考下图:
第四步:后轮摆臂上安装铜柱抬高固定球头,便于连接联动装置,如下图所示,从左到右,箭头1处所用铜柱为28mm高,这个高度比较合适,太矮的话,会增大拉杆的角度,太高就会撞到上边的长拉杆,铜柱的螺纹是M3标准的,后轮的摆臂孔需要用M3的钻头扩一下;
同理,箭头2处的螺钉是上了一个螺帽(此处的螺钉需要用到20mm长的),将此处的球头高度降低,来减小拉杆的角度,这样,如果车受力往下沉,此处拉杆基本可以呈现一个水平状态,同时还保证了球头的活动空间,不会和上面的摆臂摩擦;箭头3处的拉杆的长度是决定箭头4处立柱的距离,这个距离会决定长拉杆的角度,图上的距离大概是37mm;箭头4处的转向立柱,这个是需要购买,淘宝上是有卖的,立柱里边有螺纹孔,2.5mm大小,立柱是通过2.5mm的螺钉与底板固定住的,立柱是套在轴承里的,旋转比较灵活。
第五步:舵机摆臂到后轮联动装置的连接需要一根长连杆,我们使用的150mm长连杆,两端依旧使用的逐飞的球头固定,前面的整体图也可以清晰的看明白这个结构。
下图为长连杆和转向柱的局部示意图,转向柱的孔位也需要自行扩成3MM的。
总 结
后轮联动转向的改装方法就是这样,也不是太复杂,我们对比测试了两种结构的性能,改为前后轮联动转向后,转弯半径的确很小了,非常灵活,但也正是这种灵活增加了控制难度,真车也有采用这种结构辅助转向的设计,但后轮的随动幅度很小,不然在高速情况下会大大降低车辆的稳定性。
对于这种相较于真车而言精度低且需要速度快的车模竞速比赛来说,这种异常灵活的状态比较难控制,测试视频中可以发现前后轮联动转向的结构在高速状态下跑不了直线,各种虚位带来的晃动都会导致其走蛇形,当然正式比赛倒也没有那么快的速度,但是联动结构越复杂,出问题的概率越高,个人认为对大多数选手来说这种改装并不占多大优势,只改前面比较稳妥。
当然如果愿意挑战这种控制难度,可以参照这种方式进行改装,自己找材料改造的话成本也增加不了多少(当然也可以选择购买整套,貌似淘宝上也有卖,PS:逐飞没有整套改装方案,因为做这个测试不是为了卖点东西抢谁的生意,纯分析方案),只是平时检修维护比较麻烦。
另外还可以在这个基础上再给两根旋转柱上端加一片PCB进行固定,这样可以提高结构的稳定性,我们只是做个测试,便没再做过多的改造,也许还有更好的方法,需要车友们自己多开脑洞,加油!
-
在高空作业车改装时二极管的作用非常大2010-06-30 0
-
光电循迹小车改装的无线遥控小车2013-07-21 0
-
2016上海汽车改装展览会2016-01-29 0
-
汽车改装开关控制盒方案——打造个性化驾驶体验2023-09-08 0
-
电动车改装提速资料48V改60V的方法及注意事项2016-03-18 5958
-
RFID智能制造叉车改装具备什么功能2019-11-18 768
-
Voltabox和e-troFit合作把柴油客车改装成电动汽车2020-03-10 2885
-
中国汽车改装市场蓬勃发展,未来自律是行业向前发展的必然2020-07-08 2193
-
汽车后市场发展推动汽车改装行业发展,二手汽车翻新改装活跃2020-09-27 3378
-
九号平衡车改装套件众筹 年轻人第一辆机甲战车2020-11-03 2397
-
中国汽车后市场发展推动汽车改装行业发展,市场规模突破千亿元2020-12-04 1993
-
政策有望进一步解脱汽车改装行业限制,汽车保有量增长将起到保量作用2020-12-11 1505
-
汽车尾翼改装三维扫描3D建模3D打印综合技术服务2023-06-02 419
-
汽车改装开关控制盒方案2023-09-13 301
-
聊聊国内的汽车改装现状以及SUV车型中的CAN数据改装应用2023-12-12 240
全部0条评论

快来发表一下你的评论吧 !
