

微软推出开源跨平台的机器学习框架 ML.NET
电子说
描述
端到端的AutoML在Kaggle Days上处理表格数据
谷歌研究人员最近将一种基于学习的方法应用于表格数据,创建了一种可扩展的端到端AutoML技术。AutoML符合三个关键标准,包括:
完全自动化:不需要人工干预。输入包括数据和计算资源,输出是一个可服务的TensorFlow模型
广泛的覆盖范围:适用于许多表格数据域的任意任务
高质量:模型由AutoML生成,质量堪比由ML专家创建的人工模型
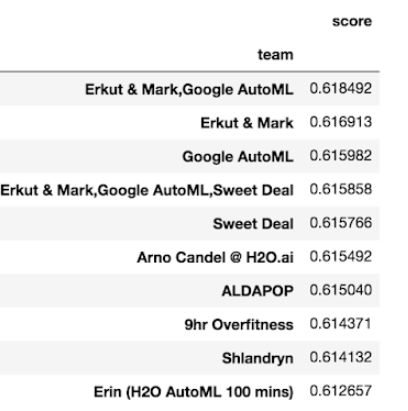
AutoML首次参与由74个团队组成的KaggleDays SF Hackathon。该挑战主要关于预测制造缺陷,目标是提供有关材料性能的信息和批量汽车零部件的测试结果。尽管他们必须与Kaggle master级别的参与者竞争,但谷歌AutoML团队最后仍名列第二。
AutoML在表格数据问题中的应用是非常令人兴奋的。AutoML可以实现能够解决表格数据问题的最先进模型。它可以帮助ML社区解决大量的问题——欺诈检测、库存预测,在商业零售、供应链管理、金融、制造、铅转换等等等。谷歌的目标是使ML更具可伸缩性,并加快研究和行业应用程序。
实现鲁棒的Winograd模式挑战结果的诀窍
研究人员最近证明,对WSCR上现有的LMs进行调参有助于提高LM处理WSC273和WNLI的能力。他们介绍了一种生成大规模WSC样本的方法,并用它从英文维基百科创建了一个1100万的数据集。该方法还与WSCR一起用于对预先训练的BERT LM进行调参。对WSC273和WNLI的准确率分别达到72.2%和71.9%,较之前的最优水平分别提高了8.5%和6.8%。
由于WSC示例是为了展现像人一样的常识和推理而开发的,因此该任务非常具有挑战性。在WSC比赛中,两轮取得90%准确率的参赛者可获25,000元大奖。此前最著名的解决方案使用了深度学习,准确率为63.7%。
本研究工作是第一个突破WNLI多数基线的模型。通过对WSCR数据集上的BERT语言模型进行微调,实现了对WSC和WNLI数据集的改进。它具有帮助未来Winograd模式挑战参与者提高WSC和WNLI准确性的潜力。
通过仿真,探索和总结建立自动方程式SAE赛车的经验教训
上周晚些时候,一组研究人员公布了他们在开发模拟自动驾驶算法时的所有探索和经验教训,然后将其部署到一辆真实的汽车上。他们的工作特别集中在方程式赛车的学生无人驾驶竞赛上。在这项比赛中,方程式赛车是由学生设计并制造的,然后它们要穿过由交通标记的看不见的赛道。
论文主要贡献:
端到端设计和部署一个自治堆栈,可以基于AirSim驾驶一个自定义方程式SAE。
独特的扩增,显著改善记录过程和训练模型
模拟训练系统如何在真实的环境中部署的详细介绍。
对真实应用中的人工智能,仿真是一项关键技术。在自动驾驶汽车上路之前,对其进行虚拟验证尤为必要。对于该领域的研究人员来说,安全性非常重要。本文在各种模拟场景中发挥了巨大的作用,以帮助未来的自动化软件达到更高的标准。
微软推出开源跨平台的机器学习框架
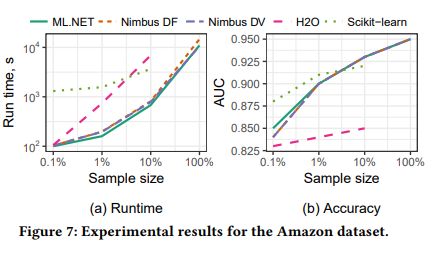
微软最近推出了ML.NET,这是一个用于构建自定义机器学习库解决方案的框架。开发ML.NET是为了让开发人员能够使用ML框架编写、测试和部署ML。它当前的实现包括2773K行c#代码和大约74K行c++代码,这些代码能够支持高性能的机器学习应用。ML.NET还支持80多个特征设定器和40个机器学习模型。
开发人员可以训练ML模型或使用第三方现有模型,并在任何脱机环境中运行,这意味着他们不需要有数据科学背景(知识)就可以使用该框架。
ML.NET是为了响应微软数据科学家的众多需求和见解而开发的,这些数据科学家将使用它来开发全球数百万人使用的服务和产品。
作为一个免费的库,ML.NET将大型软件应用程序中的ML模型应用变得更加容易。该框架以一种易于使用的方式实现,即在大型数据集上提供可拓展性的同时,还有较高的性能和在单个API数据转换下进行统一的能力。
随着ML快速发展成为现代应用程序开发的核心元素,ML.NET将帮助开发人员将ML引入相同的技术堆栈,以便更有效地编写和共享ML机制。
利用主动不确定性降低(AUR)增强机器人和控制RL
对于机器人与控制,控制器的性能和稳定性与模拟器的仿真度有关。在此背景下,一组研究人员介绍了一种利用系统动力学的仿真和不确定性量化的方法,能够以一种有效的方式来学习控制器。
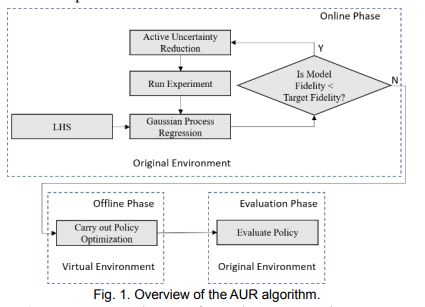
他们的方法是从一个在线阶段开始的,该阶段会评估一些用数据生成的仿真。利用训练数据和高斯过程(GPs)估计了系统的转变动力学和奖励函数。
然后,通过自适应采样,该方法使用一种有原则的方式对低保真度模型进行增强。在离线模式下,该方法则利用强化学习、近端策略优化(PPO)等无模型方法,提高了模型保真度以及优化了控制器策略。
本文结合了基于模型和无模型方法的优点,实现了稳定控制器的开发,提高了机器人以及控制器的有效数据。现实世界中的机器人制造成本高昂。这种研究工作有助于简化过程,并为复杂的系统动力学提供了更好的建模能力。
-
.NET Micro Framework简介2014-05-27 0
-
JAVA语言为什么能跨平台?2014-11-27 0
-
开源技术平台介绍2021-08-20 0
-
Visual Basic.NET学习范本2009-01-08 621
-
怎样在iOS机器学习框架Core ML2017-09-25 462
-
微软要让ML.NET框架也能用于开发深度学习应用2018-09-27 3582
-
微软新的机器学习框架核心产品机器学习引擎infer.NET的概述2018-10-14 3915
-
全年开源项目的盘点和总结2019-01-17 3042
-
微软MF微型Net框架的详细资料简介2019-04-24 968
-
微软推出基于FPGA的深度学习加速平台2019-09-03 1799
-
微软推出基于开源的机器学习框架2020-10-28 1079
-
微软发布开源开发平台.NET新版本 性能提升和开发者工具改进2020-11-12 1418
-
物联网结合机器学习(ML)的应用场景2022-06-13 1394
-
如何部署ML模型到Google云平台2023-07-05 416
-
机器学习构建ML模型实践2023-07-05 446
全部0条评论

快来发表一下你的评论吧 !
