

科普 | 跟自动驾驶领域有关的企业,你知道哪些?
电子说
描述
现阶段,都有哪些企业正在涉足自动驾驶领域,我们可以从感知层、控制层和执行层三个层面了解一下。
资料显示,以一台车的自动驾驶产品价值量在 10000 元(L3 水平)进行测算,全世界一年销量一台车,即自动驾驶产品在 L3 阶段(有条件的自动驾驶阶段)即可实现万亿级别的市场容量,预计这一阶段的全面普及会在 2025 年前实现,随后行业进入 L4 高度自动驾驶。
感知层
传感器是智能驾驶认知、决策和执行环节的基础,智能驾驶传感器主要包括摄像头、毫米波雷达、激光雷达,通常位于车辆的前后保险杠、侧视镜、驾驶仓内部或者挡风玻璃上。
与一般车载传感器相比,智能驾驶传感器对性能、精度都有更高要求,因而价格也更为昂贵,在一百元至几十万元不等,预计至2020年车载传感器市场空间可达200亿/年。
摄像头传感器
摄像头传感器通过视觉算法,可对车道、路边、障碍物、行人进行有效识别,不足在于识别范围受限、稳定性差。但单一视觉方案易受到光照、极端天气影响,且测距精度有限,因而当下主要采用“摄像头+多传感器共同探测”的解决方案。
摄像头传感器一般由摄像头、CMOS 相机和图像处理电路板组成,是当前使用最广泛的传感器。摄像头可描绘物体的外观和形状、读取标志,同时获取足够多的道路环境细节,建立完整环境模型,帮助车辆进行环境认知。
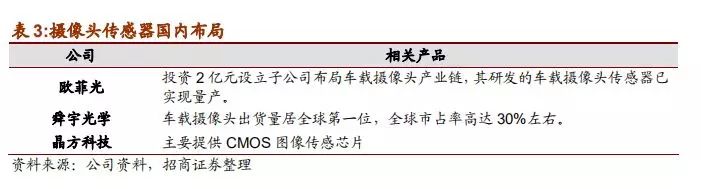
当前摄像头传感器造价成本在 30-50 美元量级,供应商国内外平分秋色。国外厂商以日立、博世、大陆、奥托立夫为主,国内亦不乏优秀的全球供应商,欧菲光、舜宇光学、晶方科技加速车载摄像头布局。
其中欧菲光投资 2 亿元设立子公司布局车载摄像头产业链,其研发的车载摄像头传感器已实现量产;舜宇光学车载摄像头出货量居全球第一位,市占率高达 30%左右;晶方科技主要提供 CMOS 图像传感芯片。
毫米波雷达
毫米波是指 30-300GHz频域(波长为 1-10mm)的电磁波,波长介于厘米波和光波之间。毫米波穿透雾、烟、灰尘的能力强,在恶劣天气下仍有较好的表现,具有全天候全时段的特点。主要应用于自适应巡航(ACC)、紧急刹车辅助(AEB)、盲点检测(BSD)、行人检测(PD)等。
车用毫米波雷达频段在 22-29GHz 和 77-81GHz 范围,分窄带(NB)、超宽带(UWB)两种形式。全球汽车毫米波雷达主要供应商包括博世、大陆、海拉、富士通、电装、天合、德尔福、奥托立夫和法雷奥等传统优势企业。
在细分领域中,不同厂商各自称王,德国海拉是 24GHz 雷达领域的巨头;博世凭借具有 250m 最长探测范围的 LRR4 在77GHz 领域位居第一;在日本市场,富士通份额排名第一,电装位居其后。毫米波雷达价格大概在 120-150 美元,国内价格在 1000 元左右。

受益于智能驾驶概念推广,毫米波雷达正逐渐成为汽车电子领域新的增长点,国内越来越多的汽车一级供应商和一些军工及安防背景的公司开始准备毫米波雷达的系统研发工作。
目前 24GHz 毫米波雷达是国内主流,其研发成本、周期及难度比 77GHz 低。77GHz 雷达由于国外对我国技术封锁、元器件依赖进口等原因,研发推广仍然有压力。
当前国外毫米波雷达公司在积极研发下一代79GHz雷达,其探测精确度是当前 77GHz 雷达的 2-4 倍。日本 77GHz 带宽限制为 0.5GHz,而 79GHz带宽可达 4GHz,发展空间巨大。并且 79GHz 雷达能够探测行人和自行车,其最优探测范围为 70m,将成为中距雷达中的主流,未来可能会挤占 24GHz 的市场份额。

激光雷达
激光雷达通过发射激光光束测量视场中物体轮廓与相对距离信息,形成点云并绘制出 3D 环境地图,激光雷达的精度为厘米级,是真正具备空间三维分辨能力的“机械之眼”。
当前已研制出可用于无人驾驶技术激光雷达产品的公司主要有美国老牌激光巨头 Velodyne,硅谷新锐 Quanergy 和德国品牌 Ibeo。国内的北科天绘也推出了首款导航型 LiDAR低成本雷达解决方案趋待量产,国内后发先至成为降成本主力。
国内外绝大多数车载激光雷达厂商仍处于研发、测试阶段,多为创业公司。国外厂商如 Innoviz,LeddarTech,Phantom Intelligence, TriLumina,MIT 团队等一大批强劲的初创公司加入激光雷达行业。
国内激光雷达起步晚,目前拥有激光雷达测量应用技术的国内公司有禾赛科技、北科天绘、镭神智能、思岚科技、巨星科技、大族激光、天鼎微波等,进军智能驾驶用激光雷达后,大多提出了金额比较低的产品。
控制层
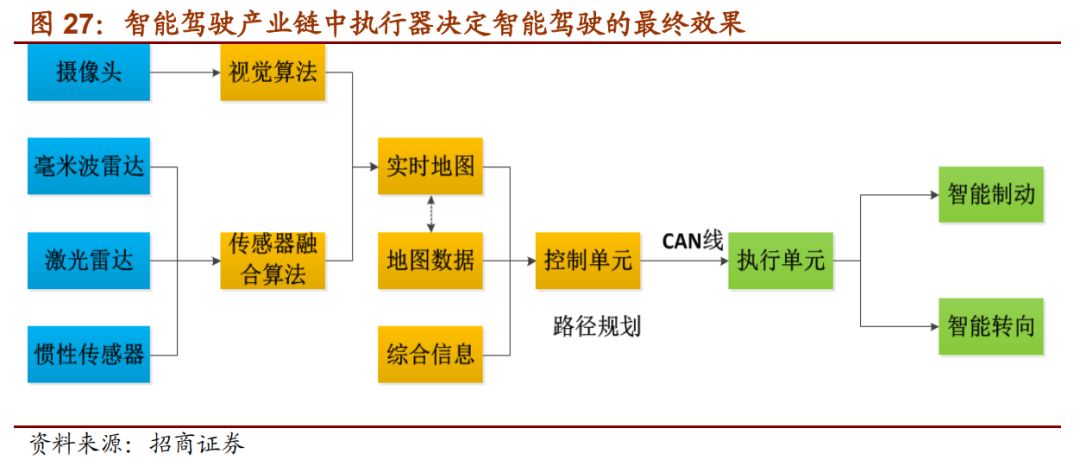
传感层识别外界物体、收集信息后输入到控制层,控制层利用视觉算法、传感器融合算法、路径规划算法进行物体识别、轨迹预测。传统算法识别精度已接近阈值,难以完全胜任对复杂的驾驶场景进行信息识别。
通过人工智能、深度学习可以极大优化算法架构提升识别能力。基于人工智能技术对行人等难度较大的物体识别率稳步突破 90%,接近可应用水平。国外巨头已逐步应用于产业化,国内的优势在于丰富的算法资源与近年来大量 AI 人才往这个方向转移,弱势在于缺乏汽车实测经验和数据。
全球市场推演人工智能,以 mobileye 和 google 为主。Mobileye 专注于视觉识别和算提升,为主机厂和一级供应商提供视觉识别模块化产品,同时加快转向传感融合、深度学习和高精度地图领域;Google 希望以人工智能切入智能驾驶,利用激光雷达获取高解析度数据,依靠 AI 匹配原有地图数据,经过数次测试逐步提升可靠性。国内算法公司识别精度有限,集中视觉领域。
智能驾驶算法的痛点是精度提升,主要的提升途径有三种,第一,视觉算法本身的优化。在前处理和前景分离阶段提取明确目标值,分类和学习系统的算法不断优化。这需要技术研发的不断投入,产生极高的进入壁垒。
第二,通过传感融合算法冗余信息判断,提高精度。视觉识别以摄像头数据为主,同时辅以雷达、激光雷达的边界、距离信息。数据显示,在相同误判率下雷达的决策辅助能降低约 10%的漏检率。
第三,人工智能、深度学习对传统视觉算法进行彻底革新。由于传统算法识别精度已接近阈值,难以完全胜任对复杂的驾驶场景进行信息识别。通过人工智能、深度学习优化算法架构,深度学习基于多层卷积神经网络,能从根本上提升算法识别能力。已有多个研究试验表明,基于人工智能技术对行人等难度较大的物体识别率稳步突破 90%,接近可应用水平。
在视觉算法自身优化方面,Mobileye 从 2004 年开始专注于视觉算法开发,自2007 年推出 EyeQ1 芯片开始,已开发四代 EyeQ 系列芯片和配套算法。十多年技术积累,EyeQ 芯片图像识别帧速率由 10fps 达到最新的 48fps(已知信息),处理速度为EyeQ1 的 512 倍。最新测试数据显示,Mobileye 系统车道线、车辆识别率均为 99.99%,拉大与市场上同类产品差距。
在传感器融合技术方面,恩智浦近期推出基于 Linux 系统的Blue-Box 计算机平台,其性能能够满足单台车同时安装 4 台摄像头、四架激光雷达、一架毫米波雷达以及 V2X 系统的要求,对传感器进行模块化管理,可将多种传感器回传信息进行融合加工。据悉 Mobileye、Valeo、Velodyne 均有支持传感器融合平台的研发计划,传感器融合将是未来主要趋势。
在深度学习对传统视觉算法进行革新方面,Mobileye、Ceva、恩智浦、高通、德州仪器等正加紧研发带有神经网路软体架构的智能驾驶芯片;NVIDIA 则更进一步,已推出 DrivePX2、Tesla P100 GPU 和 DGX-1相结合的完整深度学习技术方案。
Drive PX2:单精度浮点运算性能达到 8TFLOPS,深度学习计算能力接近 24 DL TOPS;而其体积已明显缩小,可放置在车辆上使用。它可以融合来自多个摄像头以及激光雷达、雷达和超声波传感器的数据,可准确了解汽车周围 360 度方位的环境,使用深度神经网络 (DNN) 进行物体检测和分类可大幅提高传感器数据的融合度,并且在地图和车辆状况数据基础上运用深度学习算法即时计算最安全的路径。同时它能够将外部传感器获取的图像数据加工制成单个的高精度点云,上传至云端服务器。
Tesla 最新芯片:新芯片专为特斯拉的自动驾驶功能设计,包含 60 亿个晶体管,每秒可处理 25 亿个像素,每一张图像生成后都立刻会被 GPU 处理。特斯拉声称,新的 SOC是“全球最先进的自动驾驶计算机”。与特斯拉目前的硬件相比,它的性能显著提升,最多可以每秒进行超过 144 万亿次运算。该芯片的设计还减少了能耗。Bannon 说,芯片使用不到 100 瓦的电力。它的功耗为 72 瓦,其中 15 瓦为特斯拉的神经网络供电。这款新芯片将由三星公司生产,体积非常小,甚至可以安装在汽车手套箱后面。为了增强安全性能,SOC 采用两个独立的操作系统,每个系统都有自己的 DRAM 内存、闪存芯片和电源。即使其中任何一个系统失灵,汽车都能继续行驶。
另外,值得一提的是,无人驾驶芯片涉及到视觉处理、传感器融合、路径规划等多项算法,对运算能力要求较高,较一般汽车用芯片价格更为高昂。以 Mobileye560 系列后装整套售价为例,其零售价格为$849,芯片价值在$300 左右。目前针对智能驾驶 L1 阶段的 EyeQ 芯片平均售价(ASP)已进入下降通道,未来有望降至$35 以下;针对 L2、L3&L4 的 EyeQ 芯片价格预计也将在未来下调。随着晶圆代工新技术和全新架构(如 NVIDIA 的 Pascal 架构)大量采用,无人驾驶芯片可延续摩尔定律发展趋势。
在自动驾驶领域,百度也投入了很多精力,现阶段百度与智能座舱 Tier 1 供应商主要共同合作研发 BCU,BCU (Baidu Computing Unit) 即百度自动驾驶的专用计算平台,可以理解为将百度 Apollo 平台的高精定位、环境感知、决策规划三大核心 AI 软件模块产品化为硬件的形态。
截至目前百度共推出了 BCU-MLOC(高精定位)、BCU-MLOP(高精定位+环境感知)、BCU-MLOP2(高精定位+环境感知+决策规划)共 3 款 BCU 产品。其中德赛西威参与了全部 3 款 BCU 的研发过程;除此之外,百度还与博世、大陆等巨头进行雷达等传感器方面的合作。BCU 的目标客户是整车厂,首批样件经 Tier 1 及整车厂上车测试之后,两年以后将量产。
在 BCU 的研发过程中百度与合作伙伴的分工十分明确:(1)百度主要负责人工智能、云以及高精度地图业务,百度所关注的领域汽车零部件企业不会去涉及;(2)NVIDIA 提供人工智能所需要的计算芯片;(3)德赛西威、采埃孚、联合电子等 Tier1 则提供具体汽车零部件的整合与生产落地(百度等互联网公司并不擅长车规级标准,阿波罗计划的主要思想是通过开放软件能力的方式使高精度定位产品化,汽车零部件企业的参与恰好补足了百度将高精度定位的模块做成硬件产品的短板)。
执行层
不同于传统汽车制动和转向的动力源都是来自于人力,智能汽车由于需要车辆主动转向和制动,因而动力源是来自于电机液压等新结构,因而就带来了匹配、效率、稳定性等各方面的要求。
感知层负责采集多传感器融合信息,交由控制层算法处理并作出驾驶策略,算法指令的最终效果将取决于执行层运作。执行器是执行层中的机械部件,从驾驶运动方向角度,执行器可以分为制动系统(纵向)和转向系统(横向)。
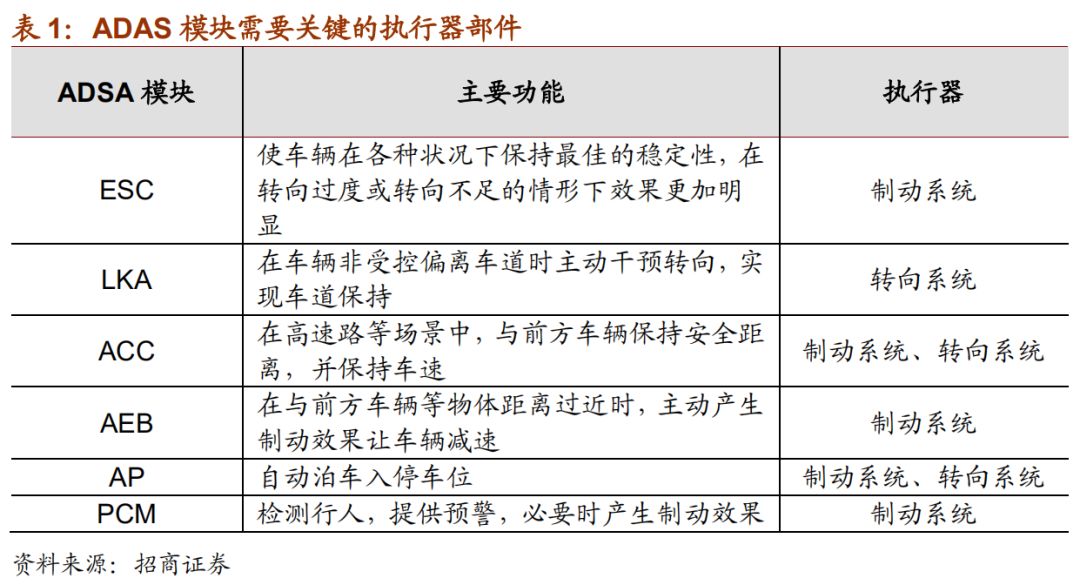
在智能驾驶的 L1/L2 阶段,ADAS 驾驶模块作为初级产品迎来商业化应用。原来 ADAS模块仅部分应用在欧美日及合资车的中高端车型,主要普及功能有 BSD(盲区监测系统)、AEB(自动紧急制动)、ACC(自适应巡航)、APS(自动泊车)、LKA(车道保持辅助系统)、LDW(车道偏离警示系统)、FCW(前向碰撞预警系统)、PCM(行人预警)等。
据了解,目前装配率最高的是 BSD,装配率为 7.53%,其次是 LDW 和FCW,装配率分别为 7.4%和 6.83%。目前我们看到的变化是部分 ADAS 功能已经应用在中端的自主车型上,系统推进速度在加快。ADAS 模块执行驾驶任务时,依赖制动系统和转向系统运作;执行器可独立完成单向运动或相互组合完成复杂运动,成为 ADAS模块的关键部件。
主动转向目前的市场格局在于:博世,采埃孚,电装等公司采用合资的方式对中国市场进行逐步渗透,当前从行业集中度分析,电子助力转向系统(EPS)前五总份额占比61%,市场集中度高,分品牌来看,EPS 市场合资+外资品牌占比为 81%,博世华域(博世持股 51%,华域 49%)市场份额最高(23%),其余依次是捷太格特、上海天合采埃孚。
但是国内公司也还占有约 20%的市场,并且完整掌握主动转向的硬件技术,国内比如 AT 市场,国内本质上没有市场占比。而主动转向技术的自主化公司,一方面能随着行业增长获得更大的收入份额,另一方面低价优势保证公司竞争力,随着功能的最终实现,国内外的技术差距也逐步缩减。
主动制动竞争格局:国内目前处于第二代技术(ABS+ESC)渗透末期阶段,分厂商来看,博世、大陆两家巨头在中国市占率 50%以上,市场集中度非常高。但是,未来制动是第三代技术的天下,目前装车的仅有博世 IBS 和大陆 MKC1 等几家厂商,主要配套高端豪华车型,量都比较小。
但是实际上国内公司的产品已经开始下线,上汽、拓普等的样机已经装车,天津英创汇智利用清华技术已经开始实现量产。当前硬件的生产实现国内至少有 6-7 家自主企业掌握,难点在于 ESC 的自主开发。当前一些做 ABS的企业已经开始转型 ESC 系统,可以预见 ESC 也会类似于 ABS 的发展路径最终国产化,不再成为国外垄断线控制动的因素。执行层国外厂商格局还未形成,国内厂商仍可在逐步掌握核心技术后,依托产品升级和成本优势寻求一级供应商的机会。
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
[科普] 谷歌自动驾驶汽车发展简史,都来了解下吧!2016-10-25 0
-
自动驾驶的到来2017-06-08 0
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶2018-11-13 0
-
LG电子布局机器人和自动驾驶领域2018-12-03 0
-
车联网对自动驾驶的影响2019-03-19 0
-
中国自动驾驶行业前景看好,国产技术迅速发展2019-04-03 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
传感器成自动驾驶“硬实力” 有哪些2020-07-29 0
-
智驾科技MAXIEYE获评自动驾驶领域新锐企业奖2022-04-15 2120
全部0条评论

快来发表一下你的评论吧 !
