

旋转变压器应用
变压器
描述
60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。随着电子技术和数字计算技术的发展,数字式计算机代替了模拟式计算机。
这些年来,随着工业自动化水平的提高,随着节能减排的要求越来越高,效率高、节能显著的永磁交流电动机的应用,越来越广泛。而永磁交流电动机的位置传感器,原来是以光学编码器居多,但这些年来,却迅速地被旋转变压器代替。可以举几个明显的例子,在家电中,不论是冰箱、空调、还是洗衣机,目前都是向变频变速发展,采用的是正弦波控制的永磁交流电动机。目前各国都在非常重视的电动汽车中,电动汽车中所用的位置、速度传感器都是旋转变压器。例如,驱动用电动机和发电机的位置传感、电动助力方向盘电机的位置速度传感、燃气阀角度测量、真空室传送器角度位置测量等等,都是采用旋转变压器。
在应用于塑压系统、纺织系统、冶金系统以及其他领域里,所应用的伺服系统中关键部件伺服电动机上,也是用旋转变压器作为位置速度传感器。
旋转变压器的应用已经成为一种趋势。
旋转变压器又称分解器,是一种控制用的微电机,它将机械转角变换成与该转角呈某一函数关系的电信号的一种间接测量装置。 在结构上与二相线绕式异步电动机相似,由定子和转子组成。定子绕组为变压器的原边,转子绕组为变压器的副边。激磁电压接到转子绕组上,感应电动势由定子绕组输出。常用的激磁频率为400Hz,500Hz,1000Hz和5000Hz。
旋转变压器结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅度大,抗干扰性强,工作可靠。因此,在数控机床上广泛应用。
通常应用的旋转变压器为二极旋转变压器,其定子和转子绕组中各有互相垂直的两个绕组。另外,还有一种多极旋转变压器。也可以把一个极对数少的和一个极对数多的两种旋转变压器做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于高精度检测系统和同步系统。
目前,旋转变压器主要是用于角度位置伺服控制系统中。由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。
旋转变压器的应用,发展很快。除了传统的、要求可靠性高的军用、航空航天领域之外,在工业、交通以及民用领域也得到了广泛的应用。
特别应该提出的是,这些年来,随着工业自动化水平的提高,随着节能减排的要求越来越高,效率高、节能显著的永磁交流电动机的应用,越来越广泛。
而永磁交流电动机的位置传感器,原来是以光学编码器居多,但这些年来,却迅速地被旋转变压器代替。
目前各国都在非常重视的电动汽车中,电动汽车中所用的位置、速度传感器都是旋转变压器。在应用于塑压系统、纺织系统、冶金系统以及其他领域里,所应用的伺服系统中关键部件伺服电动机上,也是用旋转变压器作为位置速度传感器。
旋转变压器传感器的工业应用
一些绝对旋转传感技术(如光编码器)被多次选用于工业应用。然而, 当应付恶劣环境或出于低成本考虑时,旋转变压器是理想的选择。
伺服电机常用于工业领域,与旋转变压器以及其他类型的位置传感器相连接。通常使用伺服电机和伺服驱动器与旋转变压器配合来实现角速度与位置测量的应用包括:
·数控(CNC)和注塑机
·升降机
·机械手臂
·电动交通工具(电动自行车、电动滑板车、电动轮椅等)
·铁路运输
·农业和建筑设备
·公共汽车和重型卡车
·高尔夫球车和低速电动车
主要的旋转变压器传感系统要求
精确和及时的旋转变压器角度输出
在找到利用旋转变压器来减轻电磁干扰对工业系统的影响的方法之前,重要的是要先理解为什么精确的位置控制是必不可少的。
旋转变压器提供一个理论上与无限解析度一样的模拟输出。模拟到数字的转换技术,通过将输出分割成块或步骤的程度来限制解析度。对持续角进行有限分割将导致定量错误。
例如,您可以使用一个12位分辨率的转换器来提供角输出。转换器轴旋转一圈被分为4096步(2^12对应一个12位分辨率)。由于一度等于60分,所以旋转一圈(360度)等于21600角分(60x360)。则每步的间隔为5.27角分(21600/4096)。系统不可能提供比5.27角分更好的信息。
决定正确角位置的两个关键点是系统精度和系统稳定时间。后者主要指的是角输出要花多久才能显示出精确位置。需要对系统的每个部件进行评价,以确定限制因素。系统中,典型的误差精度是旋转变压器误差和旋转变压器模拟数字转换(RDC’s)误差的总和。
最常见的是,3-10角分就会出现一个旋转变压器误差。再加上5.27角分会出现旋转变压器模拟数字转换误差,则我们可以得出精确的误差出现范围是8.27-15.27角分。因此,选择正确的RDC很重要。
以下因素在典型的旋转变压器应用中会对系统精度和稳定时间产生影响 :
一、机械因素
·传感器的结构(零位电压、变压比等)
·传感器规格随温度的变化
·线圈不平衡:正弦和余弦线圈输出电压可能会不平衡,从而导致误差
·旋转变压器传感器未对准:旋转变压器也许安装错误,导致系统静态误差
·旋转变压器传感器的极的数量:由于每增加一对极就会多检测360度,因此增加的极数会降低角误差
二、电气因素
·旋转变压器模拟-数字转换结构
·旋转变压器信号输入到角输出的时间延迟,反应快速的角变化稳定时间
·模拟前端(AFE)部件的不平衡
·系统具备处理环境因素的能力(例如,外部磁场或共模噪音)
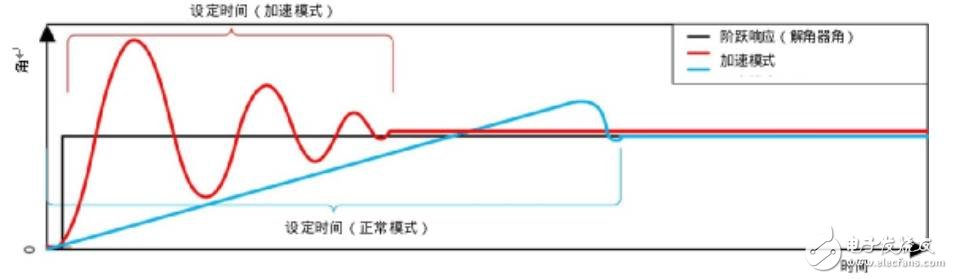
三、稳定时间
当旋转变压器的电机位置或输出信号变化迅速时,稳定时间是RDC控制系统的快速性能指标。图1显示的一个是有阶跃输入变化(黑线)的RDC反馈控制系统的稳定时间的例子。蓝色信号显示的是对电路的正常模式响应,红色信号显示的是加速模式过程中响应(角快速变化)。为了在快速变化的条件下追踪到旋转角,加速模式帮助控制回路很容易跟踪到一个快速的旋转角。
四、EMC/EMI影响旋转变压器系统
电磁兼容性(EMC)指的是:电子系统要怎样在电磁环境中运行而不产生问题(免疫力)。同样地,系统发射脉冲一定不能干扰到范围中的任何产品。在工业设备应用中,变速驱动器和控制电路是主要干扰源。功率元件的快速切换,例如绝缘栅双极型晶体管(IGBT)和微控制器,是高频发射或干扰的主要来源。IGBT切换时间可长达100nS。
电气设备应该不受高频现象影响,例如:
1.静电放电(ESD)
2.快速瞬变(也称为EFT)
3.辐射电磁场
4.传导射频干扰
5.浪涌脉冲
旋转变压器在混合动力汽车中的应用
世界各国环境保护措施越来越严格,用环保型汽车替代普通燃油发动机汽车将成为今后汽车发展的主流,目前已经出现的环保汽车有:太阳能汽车、氢能源汽车、燃料电池汽车、混合动力汽车等等。但是在这些车型中, 目前只有混合动力汽车真正具有实用推广价值。
混合动力汽车的动力系统以动力传输路线分类,可分为串联式、并联式和混联式等三种。
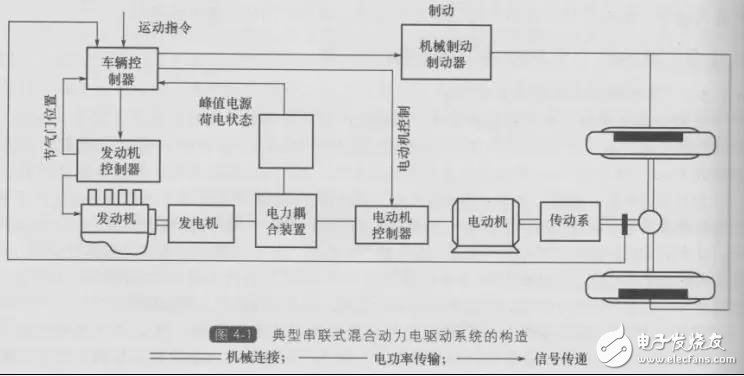
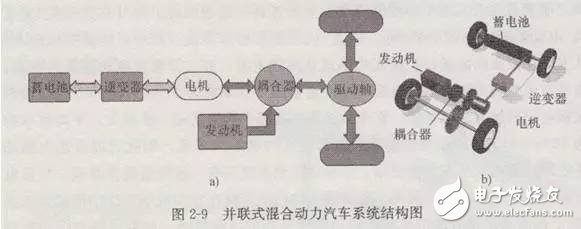
不管采用何种方式,在电动机参与传动时都需要速度反馈,控制器接收到速度反馈信号后控制电动机驱动机构将车速稳定在目标速度, 也可以根据速度选择传动方式。
常用的速度反馈元件有旋转编码器,霍尔速度传感器、旋转变压器(简称旋变)。从功能上来讲,三者都能完成速度反馈的功能,但是编码器由于码盘防护等级不高,容易震坏,虽然有较高的分辨率,但是维修频率高,从而影响整台车质量可靠性;霍尔速度传感器价格便宜、 但是分辨率低,使得控制精度受到限制, 而且霍尔元件长时间受热后磁性会减弱,所以使用寿命不长;
旋转变压器由于转子和定子分离,无接触,而且采用无刷设计,所以有很高的防护等级,能耐高强度的震动,不怕水和油污,使用寿命可以长达数十年,另外采用专用的转换芯片解码,可以将旋变输出的模拟信号转换为数字信号,有和旋转编码器相当的解码精度。因此,做为混合动力汽车的速度反馈元件,旋变可以说一种比较理想的选择。
混合动力汽车由电动机驱动时必须检测电动机的转速,应用旋变时需要将其转子安装在马达轴上检测其速度,当然也可以通过其他耦合方式检测。
安装在电机内部时,由于马达内部的磁场会影响旋变本身的磁通量变化率,从而影响其解码精度,因此必须加装屏蔽罩。并且在旋变的输出线上套上屏蔽线,降低空间电磁干扰。
采用这种安装方法将使旋变得到很好的保护,不会受到灰尘、油污等的影响, 因此旋变使用寿命长,故障率低, 是一种理想的使用方法。
旋变的输出信号是连续变化的模拟信号,用户一般不能直接使用,需转换为方波信号方可。
针对自己生产的旋变,我司已经推出了完整的解码板,可以支持多款旋变。解析度为1024C/T。
电动汽车用旋转变压器特征
1、超薄尺寸:作为内置型结构,实现了超薄设计和装配。
2、允许工作温度范围:-55℃~+155℃
3、防护等级高:耐震动和冲击
4、高旋转速度:最高可以达到60000 RPM
5、高可靠性:由于采用了和马达相似的结构,但是由于转子无绕线,因此具有很高的可靠性。
6、低成本:通过减少元件数目大幅度的降低了旋变的成本
旋转变压器与伺服电机电角度相位的对齐方法
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出;
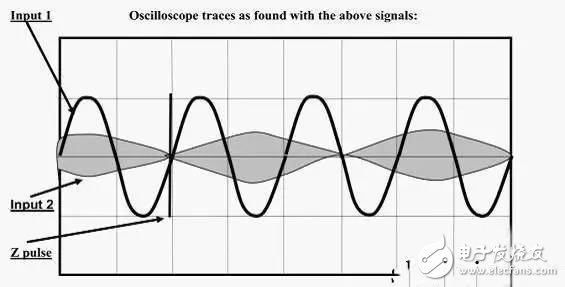
2.然后用示波器观察旋变的SIN线圈的信号引线输出;
3.依据操作的方便程度,调整电机轴上的旋变转子与电机轴的相对位置,或者旋变定子与电机外壳的相对位置;
4.一边调整,一边观察旋变SIN信号的包络,一直调整到信号包络的幅值完全归零,锁定旋变;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,信号包络的幅值过零点都能准确复现,则对齐有效 。
撤掉直流电源,进行对齐验证:
1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;
2.转动电机轴,验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合。
这个验证方法,也可以用作对齐方法。
此时SIN信号包络的过零点与电机电角度相位的-30度点对齐。如果想直接和电机电角度的0度点对齐,可以考虑:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;
4.一边调整,一边观察旋变的SIN信号包络的过零点和电机U相反电势波形由低到高的过零点,最终使这2个过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
需要指出的是,在上述操作中需有效区分旋变的SIN包络信号中的正半周和负半周。由于SIN信号是以转定子之间的角度为θ的sinθ值对激励信号的调制结果,因而与sinθ的正半周对应的SIN信号包络中,被调制的激励信号与原始激励信号同相,而与sinθ的负半周对应的SIN信号包络中,被调制的激励信号与原始激励信号反相,据此可以区别判断旋变输出的SIN包络信号波形中的正半周和负半周,对齐时,需要取sinθ由负半周向正半周过渡点对应的SIN包络信号的过零点,如果取反了,或者未加准确判断的话,对齐后的电角度有可能错位180度,从而有可能造成速度外环进入正反馈。
如果可接入旋变的伺服驱动器能够为用户提供从旋变信号中获取的与电机电角度相关的绝对位置信息,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示从旋变信号中获取的与电机电角度相关的绝对位置信息;
3.依据操作的方便程度,调整旋变轴与电机轴的相对位置,或者旋变外壳与电机外壳的相对位置;
4.经过上述调整,使显示的绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算绝对位置点都能准确复现,则对齐有效。
此后可以在撤掉直流电源后,得到与前面基本相同的对齐验证效果:
1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;
2.转动电机轴,验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合。
如果利用驱动器内部的EEPROM等非易失性存储器,也可以存储旋变随机安装在电机轴上后实测的相位,具体方法如下:
1.将旋变随机安装在电机上,即固结旋变转轴与电机轴,以及旋变外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取由旋变解析出来的与电角度相关的绝对位置值,并存入驱动器内部记录电机电角度初始安装相位的EEPROM等非易失性存储器中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的驱动器内部EEPROM等非易失性存储器中的位置检测值就对应电机电角度的-30度相位。此后,驱动器将任意时刻由旋变解析出来的与电角度相关的绝对位置值与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要伺服驱动器的在国内和操作上予以支持和配合方能实现,而且由于记录电机电角度初始相位的EEPROM等非易失性存储器位于伺服驱动器中,因此一旦对齐后,电机就和驱动器事实上绑定了,如果需要更换电机、旋变、或者驱动器,都需要重新进行初始安装相位的对齐操作,并重新绑定电机和驱动器的配套关系。
-
旋转变压器解调原理2015-08-09 0
-
关于旋转变压器输出的差分信号2016-07-28 0
-
带你认识“旋转变压器”2016-10-26 0
-
旋转变压器的基本原理2018-12-04 0
-
旋转变压器是什么2021-07-12 0
-
用于旋转变压器应用的参考设计2022-09-27 0
-
旋转变压器如何工作2022-11-14 0
-
旋转变压器ppt2008-10-23 795
-
什么是旋转变压器?2008-10-23 2500
-
旋转变压器的结构2008-10-23 4760
-
旋转变压器的应用2009-04-30 1273
-
旋转变压器原理与应用知识2009-11-25 2430
-
旋转变压器的结构和原理2009-12-14 4483
-
什么叫旋转变压器、旋转变压器的分类2010-01-11 2503
全部0条评论

快来发表一下你的评论吧 !
