
设计技术


-
导体三极管中参与导电的有两种极性的载流子,所以也称为双极型三极管。本文介绍另一种三极管,这种三极管只有
-

一是为IC电源提供瞬间工作所需的大电流(也有的叫旁路) 二是作为一种去耦的作用,即抑制IC内部的杂讯如振荡器的多次谐波传到电源里而干扰其它电路的,也就是说杂讯不要传递到电源层或地层。
-
在 20 世纪 90 年代末和 21 世纪初,全球定位系统 (GPS) 就已经成为主流。最开始是室外导航,随着导航技术的发展,可用于室内定位人和物的需求与日俱增。导航技术的微型化之路促进了UWB 技术的诞生和发展。
-
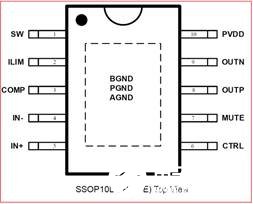
LinkedIn目前,户外蓝牙音箱(包括手提音箱及拉杆音箱等产品类型)深受消费者的喜爱,其便携性既能满足家用,也能满足一定时间内的户外使用,其音质效果优于一般的小蓝牙音箱,适合户外活动广场舞等场合。因其体积重量要求的要求决定了供电是以单节18650锂电池为供电电源。
-
相信不少玩机朋友们都尝试过CPU超频,通常所说的超频简单来说就是人为提高CPU的外频或倍频,使之运行频率得到大幅提升,即CPU超频。如今很多高品质的主板上通常都是采用的纯跳线方式进行超频,如部分华硕超频主板就支持一键超频功能。
-
视频监控行业正在经历一场重要的转变,从传统的主要基于模拟技术的CCD闭路电视(CCTV)系统转向更先进的数字互联网协议(IP)监控解决方案。监控摄像头的一个关键根本趋势是转向720P和1080P两种高清晰度(HD)视频格式。
-
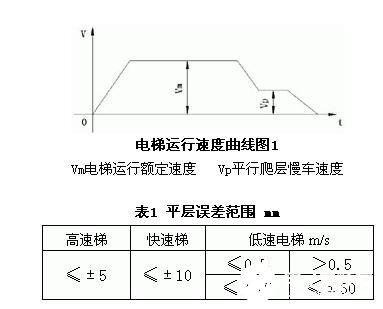
电梯是现代建筑内关系到人民生命财产安全的重要交通工具。如何提高电梯的运行效率、降低电梯能耗以及减少机械磨损、延长电梯的使用寿命,都是非常重要的研究课题。电梯是楼层用以固定提升的成套设备,具有安全可靠、乘坐舒适、停层准确、操作简便、运输效率高等特点。
-
遗传算法(Genetic Algorithm,GA)最早是由美国的 John holland于20世纪70年代提出,该算法是根据大自然中生物体进化规律而设计提出的。是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,是一种通过模拟自然进化过程搜索最优解的方法。
-
USB连接自从首次推出到现在已经有23年,这种技术在全球电子行业中的扩展速度前所未有。USB现在已经拥有超过30亿端口的年出货量,是迄今为止最常用的接口技术,笔记本电脑、平板电脑、智能手机和其他各种设备都依赖于这种技术来进行功率和数据传输。今天USB已经远远超出其最初提供的功能,所支持的数据速率和功率水平都提高了几个数量级。而且,由于这种不断发展的推动,US
-

什么是“快速启动”呐?它是一种混合系统启动方案,可以简单地理解为系统会把关机前的系统状态从内存复制一份镜像保存到系统盘里,下次启动后就直接加载,从而达到快速启动的目的。
