

你对五轴机床的认识,还差一个RTCP
描述
机床是一个国家制造业水平的象征,而代表机床最高境界的是五轴联动数控机床。由于在航空、军事、精密器械等高端制造领域的重要应用,所以对于一个国家而言,五轴联动机床具有战略意义。
军迷界,流传着这样一个故事:
什么是五轴加工?
五轴加工,顾名思义是数控机床加工的一种模式,是x、y、z三个移动轴再加上任意两个旋转轴,被认为是叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等加工的唯一手段。而五轴机床也称作五轴加工中心,可以不改变工件在机床上的位置而对工件的不同侧面进行加工,可大大提高棱柱形零件的加工效率。
五轴机床机械结构形式多种多样,但主要有以下几种形式:

相较于传统的三轴机床,五轴机床具有改善切削条件、避免刀具干涉、一次装夹、提高加工质量和效率、简化生产管理、缩短新产品研发周期等众多优势。
由于五轴机床系统价格昂贵,加之NC程序制作较难,使其难以“平民”化应用,但随着计算机辅助设计(CAD)、计算机辅助制造(CAM)系统取得了突破性发展,国产五轴机床取得了突破性发展。
真假五轴
一台数控机床有五个联动轴并不能就此简单地称之为五轴机床,同样,一套数控系统能控五个轴,也不能就此声称为五轴数控系统。
判断其是否是真正的五轴机床和五轴数控系统,首先必须看其是否具备RTCP功能。
RTCP,即Rotational Tool Center Point的缩写,字面意思是“旋转刀具中心”。RTCP具有以下特点:
1.针对刀具的实际切削点执行进给控制;
2.针对五个轴的前瞻控制;
3.可处理垂直、倾斜和存在偏心的铣头;
4.“虚拟主轴”:将某个轴定向到刀具轴线上执行钻削和回退操作;
5.针对五轴的坐标旋转和(或)坐标变换;
6.参考坐标系(G194)的旋转:应用于加工程序以及那些来自JOG或手轮的运动。
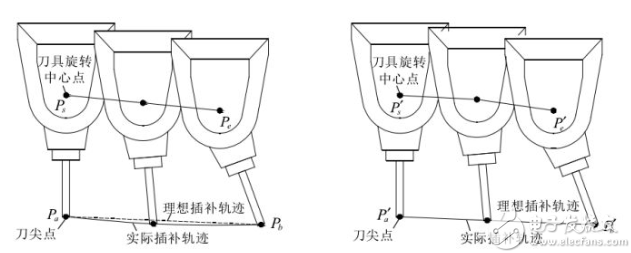
没有RTCP功能的机床,其插补运算对象是刀具旋转中心,即刀轴点,而开启了RTCP功能的机床,则变成了刀尖点,其加工效果区别如下图所示:
RTCP的标定
机械部件加工和装配,使得旋转轴与理论设计存在偏差。例如,理论上,双转台五轴机床的两个旋转轴通常设计成相交且垂直,之间不存在空间距离,但是在实际中,不一定相交,也不一定垂直。
RTCP参数是描述五轴机床两个旋转轴相对位置的结构参数,五轴结构参数测量精度直接决定了 RTCP 功能的好坏,从而影响刀具中心点定位精度,因此五轴机床结构参数精密测量意义重大。
传统手工测量存在如下缺陷及局限性:
(1)难以测量两个旋转轴的轴线方向,默认两轴线与相应坐标轴平行且相互正交,这是手工测量方法的前提。但是在实际中,两轴线不一定与坐标轴平行,也不一定相互正交,此测量前提是无法保证的,这样便会带来测量误差。
(2)双转台RTCP 结构参数测量时,要求主动轴能在正向或者负向旋转 90°,并非所有机床具备这个角度行程。
(3)操作步骤繁琐,自动化程度低,测量结果好坏往往与机床测试人员经验有很大关系。
为解决手工测量精度缺陷和使用局限性,最大限度实现测量的自动化和统一化,实现旋转刀具中心点精确控制,深圳众为兴的高性能轨迹运动控制卡ADT-09系列开发了一种RTCP拟合标定算法,通过测量模块中数据处理,能精确计算旋转轴轴线方向和偏移,改变了手动无法测量回转轴线方向和测量结果精度不足的局限,实现旋转刀具中心点的精确控制。
ADT-09系列的RTCP模型也支持非正交的五轴机床结构,支持旋转轴线任意方向、两旋转轴轴线正交与非正交、相交与异面的各种情况。
△众为兴ADT-8969G1运动控制卡
应用案例分享
那么众为兴ADT-09系列运动控制卡,在具体的应用中,是如何发挥其RTCP功能的优势呢?
一、当RTCP遇上视觉点胶
如何实现手机中框倾斜任意角度的双工位、高精、高效点胶?
通常,点胶工艺出于对胶量等因素的控制,其出胶口须与工件保持固定的高度,平面点胶只需保持Z轴高度的前提下,实现轨迹控制和胶阀控制即可,而遇到类似如下情形,则一筹莫展——
ADT-09系列则经受住了这种考验,巧妙地利用了客户的视觉系统和激光测高系统,得出高精标定数据,配合螺距补偿、AC正交补偿等专门针对五轴设备的标定误差补偿功能,利用RTCP算法实现了手机中框倾斜任意角度的双工位、高精、高效点胶系统。
二、当RTCP遇上Focal
如何控制Focal激光测高仪跟随并等间隔采集手机轮廓?
该项目使用5D RTCP算法控制Focal激光测高仪跟随并等间隔采集手机轮廓,5轴平台A轴分别在0°/45°姿态下,使Focal绕手机正表面轮廓扫描一周,3D模拟软件可以利用Focal采集数据拟合描绘实际采集的3D效果,以观察手机正面、侧面的平整度。
-
RTCP、一次装夹、双转台……这是一份五轴应用说明书2021-09-03 2345
-
RTCP、一次装夹、双转台……这是一份五轴应用说明书 精选资料分享2021-08-31 1115
-
高精度五轴数控机床大大缩短制造工序,提高生产效率2021-08-24 1881
-
五轴联动机床的产品分类是怎样的2021-08-16 2004
-
常见五轴机床的机械结构形式是怎样的2021-07-28 2960
-
打破国外同行的垄断,中国“S试件”五轴机床检测方法成为国际标准2020-03-12 4994
-
一文知道五轴联动机床的种类2020-01-29 15974
-
基于五轴联动数控机床的结构2017-09-29 1304
全部0条评论

快来发表一下你的评论吧 !
