

怎样用Arduino蓝牙控制伺服电机
电子说
描述
简介
我在DIY Arduino& amp;蓝牙机器人手臂,使用ESP8266的网络控制伺服,Arduino操纵杆界面等等。实际上,伺服电机是需要精确定位的项目的重要组成部分之一。
在这个项目中,如前所述,我将向您展示如何控制伺服电机使用蓝牙。但在进一步了解使用Arduino的蓝牙控制伺服电机的细节之前,有一些重要的事情要知道伺服电机的工作原理以及如何控制伺服电机的位置。
关于伺服电机及其控制的简要说明
伺服电机基本上是直流电机,附加电路有助于实现伺服电机的精确定位。为了控制伺服电机轴的旋转,需要一个称为脉冲宽度调制或PWM信号的特殊信号。
根据脉冲宽度,伺服电机的位置会发生变化。有几种方法可以生成PWM信号来控制伺服电机。传统的方法是使用完全模拟电路,如555定时器IC,并使用电位计控制脉冲宽度。
但借助Arduino等微控制器(ATmega328)确切地说,您可以在没有任何外部组件的情况下生成PWM信号。
注意:如果您想测试伺服电机是否工作或不是,你可以实现一个类似于我在如何制造一个简单的伺服电机测试仪电路中使用的简单设计,你不需要任何微控制器和编程来测试伺服电机。
使用Arduino的蓝牙控制伺服电机概念
蓝牙控制的主要概念使用Arduino项目的伺服电机非常简单。使用Arduino生成的PWM信号控制伺服电机。 Arduino的输入是通过蓝牙通信的Android智能手机提供的。
电路图
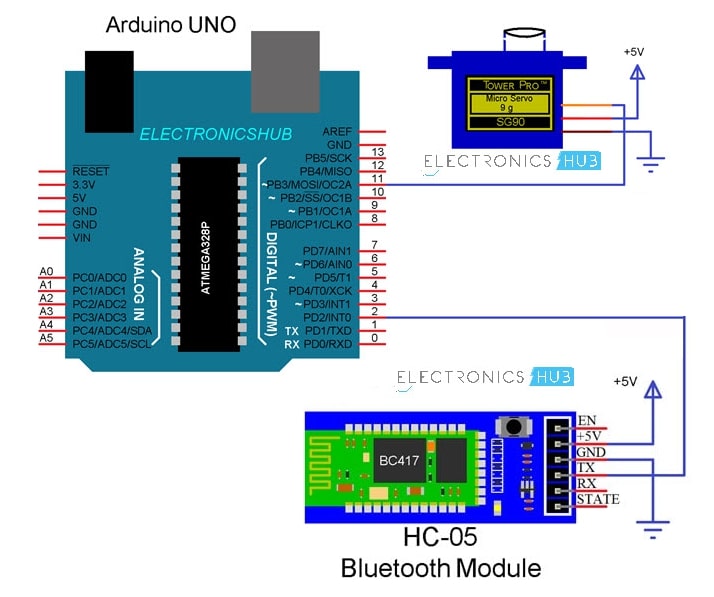
使用Arduino的项目蓝牙控制伺服电机的电路图如下所示。
组件必需
Arduino UNO
HC-05蓝牙模块
TowerPro SG90伺服电机
连接电线
5V电源
面包板
电路设计
使用Arduino和蓝牙控制伺服电机的电路设计非常简单。将伺服电机的控制引脚连接到Arduino的引脚11。将控制引脚连接到Arduino的PWM使能引脚非常重要。
我将使用Arduino的软件串行选项,因此Arduino的引脚2和3是固定为RX和TX。因此,将蓝牙模块的TX连接到Arduino的RX(引脚2)。
由于蓝牙模块的工作是传输从手机接收的数据并将其传输到Arduino,我只使用了其TX Pin。
了解更多信息关于HC-05蓝牙模块以及如何与Arduino接口,请参考“Arduino HC-05蓝牙模块”。
伺服电机控制应用程序
我使用了由“YSRGGS”开发的名为“伺服电机控制”的应用程序。将应用程序连接到蓝牙模块后的应用程序布局如下所示。
如您所见,应用程序提供两种控制伺服电机的方法:使用专用按钮或使用滑块。
要下载此应用程序,请访问此链接:“伺服电机Kontrol“。
代码
项目代码蓝牙控制伺服使用Arduino的电机如下所示。
工作
这个项目的工作非常简单。按照电路图进行连接,并将代码上传到Arduino。然后打开Servo Motor Kontrol应用程序(假设它已安装在您的Android手机中)并连接到蓝牙模块。
连接成功后,您可以通过调整滑块或按任何预设按钮来控制伺服电机。
结论
本项目展示了一种控制伺服电机的简单方法。使用此项目,您可以使用Arduino和蓝牙模块控制任何伺服电机。
如果您是初学者,该项目可以是实施多个复杂机器人项目的开始步骤涉及伺服电机。
-
如何使用Arduino开发板通过蓝牙方式控制伺服电机2021-06-28 1329
-
如何使用Arduino开发板通过蓝牙方式控制伺服电机?2021-09-30 1698
-
怎样用串口通信去控制伺服速度呢2021-10-11 1770
-
请问如何使用Arduino的蓝牙控制伺服电机?2023-03-01 1576
-
请问怎样用一个脉冲使伺服电机旋转呢?2023-03-30 4714
-
怎样用ArduinoUNO和Wekinator控制伺服电机2019-08-03 2986
-
怎样用机器学习和openFrameworks控制伺服电机2019-08-02 3911
-
怎样用Arduino连接电机2019-08-29 18093
-
基于Arduino UNO和HC-05蓝牙模块控制伺服电机2021-04-28 6536
-
如何使用Arduino的蓝牙控制伺服电机2022-11-16 4908
-
Arduino/Android蓝牙伺服电机控制安卓APP2022-12-05 1101
-
用Arduino和电位器控制伺服电机的位置2023-02-06 944
-
Arduino/Android蓝牙多伺服电机控制2023-02-08 904
-
用Arduino控制伺服电机的超级简单方法2023-06-28 2034
-
用Arduino和MPU6050控制伺服电机2023-07-03 926
全部0条评论

快来发表一下你的评论吧 !
