

如何使用智能手机和简单的Android应用程序来控制机器人汽车
电子说
描述
简介
机器人对于学生,业余爱好者来说总是一个奇特的主题和DIYers。如果您是初学者,那么构建机器人(如汽车或手臂)可能是了解基础知识后要做的重要项目之一。
如果您还记得早期的教程,我已经讨论了HC-05蓝牙模块以及如何与Arduino进行接口。此外,我提供了一个简单的蓝牙控制器应用程序,可以安装在您的Android手机上并开始传输数据。
作为该项目的延续,我将使用Arduino和其他一些组件实现蓝牙控制机器人,并构建一个简单的机器人汽车,可通过蓝牙通信使用Android手机(通过应用程序)进行控制。
蓝牙控制器机器人的先决条件
除了Arduino,它是项目的主要控制模块为实现蓝牙控制机器人项目,您还必须熟悉其他两个重要模块。
它们是HC-05蓝牙模块和L298N电机驱动程序模块。
HC-05蓝牙模块
HC-05蓝牙模块负责启用蓝牙通信Arduino和Android手机。
有关HC-05蓝牙模块的更多信息,请参阅HC-05 BLUETOOTH MODULE。
L298N电机驱动器模块
L298N电机驱动器模块负责为机器人汽车的电机提供必要的驱动电流。我在使用L298N的早期项目Arduino DC Motor Control中提供了有关L298N模块的信息。
因此,请参阅使用L298N的ARDUINO直流电机控制有关将L298N与Arduino连接的更多信息。
注意:我强烈建议您在继续进行之前参考上述两个项目。
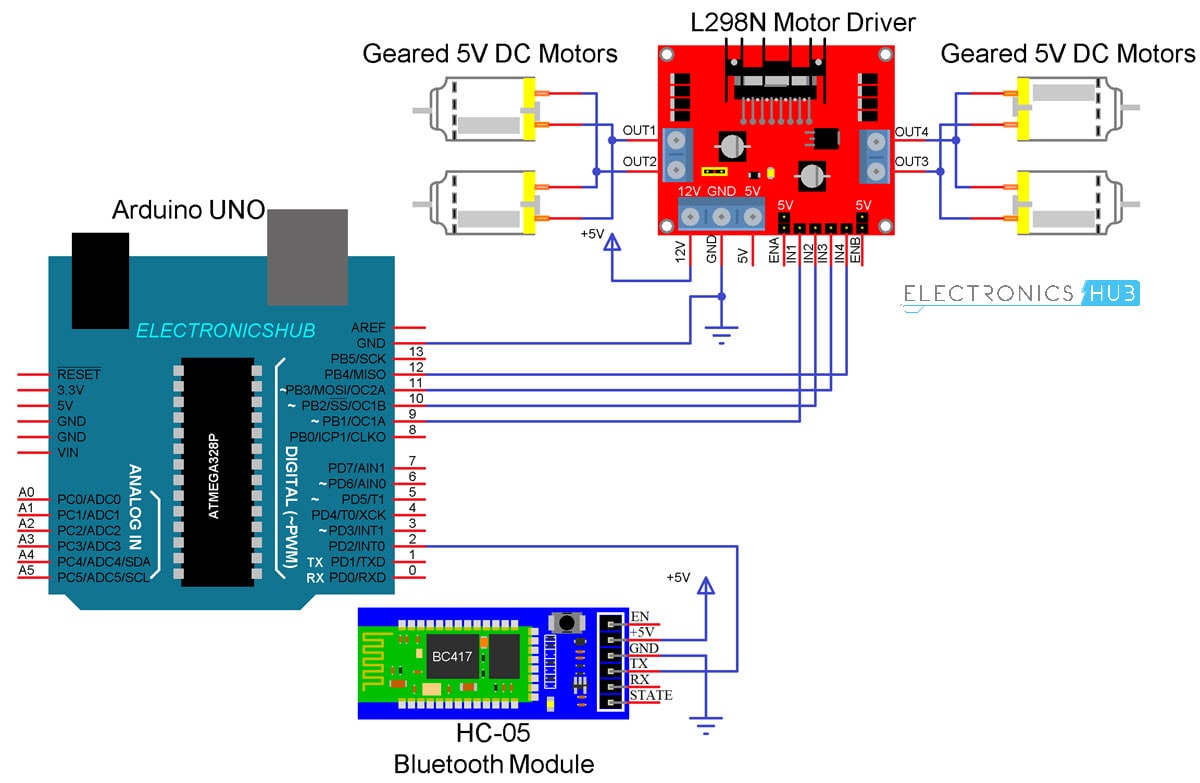
蓝牙控制机器人电路图
以下是使用蓝牙控制机器人的电路图Arduino,L298N和HC-05。
所需组件
Arduino UNO [在此处购买]
L298N电机驱动器模块[在此处购买]
HC-05蓝牙模块[此处购买]
机器人底盘[购买]
4 x 5V Geared电机[在此处购买]
连接线[在此处购买]
电池保持呃[在此购买]
电源
Android手机
蓝牙控制器应用
注意:我使用L298N电机驱动模块来驱动机器人的电机。您可以使用这一个或L293D电机驱动器模块。如果您使用的是L293D,请检查连接。
电路设计
我不会详细介绍机器人的构造,因为您的机器人底盘可能与我的不同,您可以轻松地弄清楚如何从可用部件构建机器人和可能的电缆管理,以使机器人更具吸引力。
进入电路设计,首先是HC-05蓝牙模块。蓝牙模块的+ 5V和GND引脚连接到Arduino的+ 5V和GND。
由于我只会传输与机器人从Android手机到蓝牙模块的移动相关的数据,并且不打算从Arduino接收任何数据,我只会将蓝牙模块的TX引脚连接到RX Pin。 Arduino。
Arduino的这个RX引脚基于SoftwareSerial库(引脚2和引脚3在Arduino上配置为RX和TX)。蓝牙的RX引脚保持打开状态。
现在,L298N电机驱动器模块。 Arduino的数字I/O引脚9至12配置为电机驱动器的输入引脚,并连接到L298N电机驱动器模块的IN1至IN4。两个使能引脚通过提供的跳线连接到5V。
我在蓝牙控制机器人汽车项目中使用的机器人机箱配有4个减速电机。由于L298N只有两个电机的插槽,我将左侧电机作为一组连接,右侧电机作为其他电机连接,并将这两组电机连接到L298N模块的输出。
代码
蓝牙控制机器人项目的Arduino代码如下:
Android应用程序
如果您还记得HC-05蓝牙模块教程,我使用了一个名为蓝牙控制器的简单应用程序,它安装在Android手机与蓝牙模块进行通信。
在这个项目中,我使用了相同的应用程序,修改了要传输的数据。
上面给出的Arduino代码用于与蓝牙控制器应用程序中配置的数据同步。
注意:HC-05蓝牙模块教程中提供了下载蓝牙控制器应用程序的链接。要下载该应用程序,请参阅该教程。
工作
组装机器人,进行必要的连接并将代码上传到Arduino。如果您了解HC-05蓝牙模块教程,那么了解蓝牙控制机器人项目非常简单。
首先,在Android应用程序中,我使用了5个键作为前进,反向,左,右和停止。与每个键关联的相应数据如下:
前进 - 1
反向 - 2
左 - 3
右 - 4
停止 - 5
按下某个键后,相应的数据将通过蓝牙通信从手机传输到蓝牙模块。
在Arduino代码中,Arduino UNO从蓝牙模块接收任何此类数据(按下按键)并执行简单的开关案例操作与电机驱动器输入引脚的相应指令相关联的情况。
例如,如果在Android电话中按下“转发”键,则发送“1”。然后,Arduino将IN1和IN3设为HIGH,IN2和IN4设为LOW,以实现正向运动。
同样,其他键对应IN1 - IN4引脚的正确设置。
限制
由于蓝牙通信的范围有限(最大值)例如,对于2级设备为10米)蓝牙控制机器人的控制范围也是有限的。
确保为所有模块提供足够的电力,尤其是蓝牙模块。如果电量不足,即使蓝牙模块开机,它也无法传输数据或无法与其他蓝牙设备配对。
应用程序
低范围移动监控设备
军事应用(无人为干预)
辅助设备(如轮椅)
家庭自动化
-
使用智能手机控制手臂机器人的开源项目2023-02-03 826
-
控制引脚的智能手机应用程序2023-01-04 631
-
使用智能手机制作手势控制机器人2022-12-28 2060
-
由安卓智能手机控制的DIY Arduino机器人2022-11-24 794
-
使用G Sensor智能手机控制的机器人车2022-11-22 650
-
智能手机四驱机器人车的图像传输与控制2022-11-17 730
-
Android应用程序控制的机器人车2022-11-08 919
-
一款智能手机通过蓝牙控制的水上机器人2022-10-28 637
-
怎么实现基于Android平台的双手臂机器人控制系统?2021-08-30 949
-
如何通过Android应用程序来控制LED灯2019-04-10 12977
-
【分享】DIY android版手机机器人2015-08-14 19799
-
【深联华杯】基于SLH89F5162单片机的智能清洁机器人2014-01-04 6077
-
智能清洁机器人2013-11-08 9
-
Enea最新智能手机应用程序2011-05-30 1120
全部0条评论

快来发表一下你的评论吧 !
