

怎样使用Android手机的蓝牙控制机器人手臂
电子说
描述
在这个项目中,我将向您展示如何构建Arduino& amp;使用Android手机的蓝牙控制机器人手臂。该机器人手臂可以在手动模式下操作,也可以在全自动模式下进行编程。
您已经看过一个来自Electronics Hub的机器人手臂项目,我们从废料(除了电机和Arduino)做了一切。我们得到了你们对该项目的非常好的回应,基于此我们决定制作一个更好的版本2.0版,如果我必须说的话。
在进一步阅读之前试试这个使用ARDUINO的简单机器人武器。
这个DIY Arduino&蓝牙机器人手臂项目使用Android手机通过蓝牙通信进行操作。我们开发了Android手机应用程序,您可以使用它来控制机械臂进行手动操作或对其进行编程以实现全自动操作。我将在后面的章节中解释它们。
想要购买 这个项目? MAIL US
Arduino电路图&蓝牙控制机械臂
让我们从Arduino&的电路图开始。蓝牙控制机器人手臂项目。下图显示了具有所有必要连接的电路图。
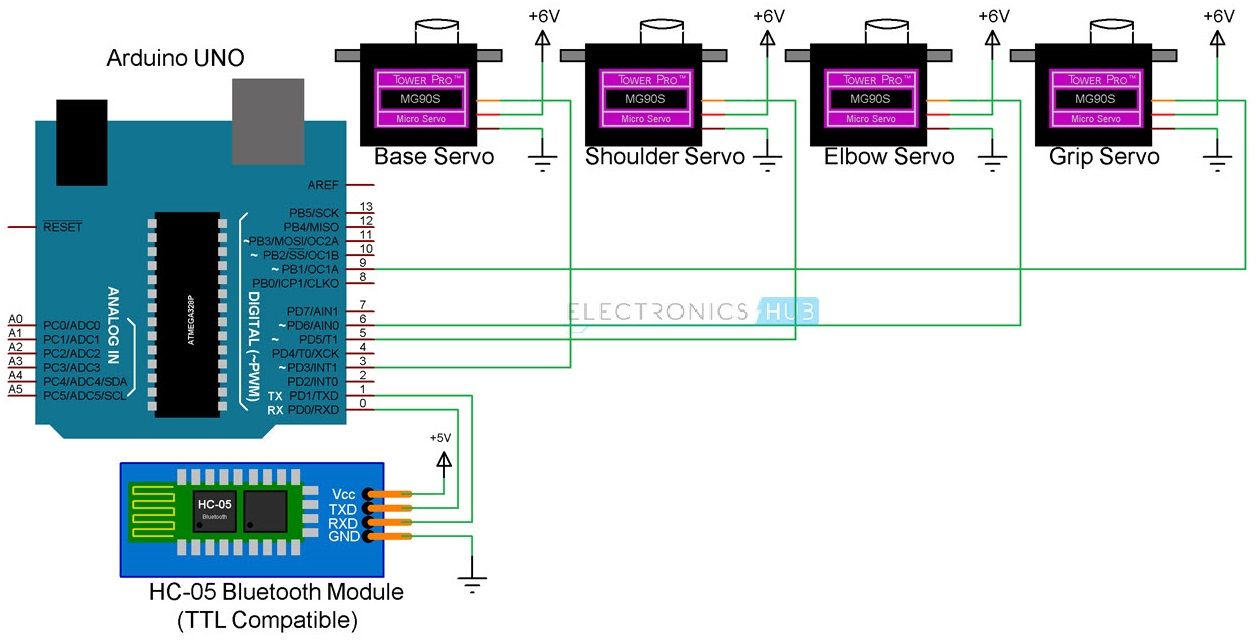
电路图看起来非常简单但构造部分机器人手臂有点复杂。
机械臂项目所需的组件
Arduino UNO [在此处购买]
4 x Tower Pro MG90S合金齿轮伺服电机[在此处购买]
HC-05蓝牙模块[此处购买]
3D打印机器人手臂部件及必要的螺钉,螺母和螺栓[购买]
Arduino和4伺服电机的正确电源[在此处购买]
连接线[在此处购买]
安装了自定义应用程序的Android手机
组件说明
Arduino UNO和蓝牙模块在组件列表中非常简单,但有趣的组件是Metal齿轮伺服系统和3D打印机器人手臂部件。
合金齿轮伺服MG90S
机械臂结构中使用的伺服系统是TowerPro MG90S合金齿轮微型伺服系统。我们选择了这种特殊的伺服系统,因为普通的塑料齿轮伺服系统不稳定,失速扭矩也较小。
在6.6V电源下,这款金属齿轮伺服系统提供2.2Kg/CM的失速扭矩(远远超过常规SG90伺服系统)。
3D印刷机械臂
任何机器人手臂项目的重要特征之一就是美学。因此,我们决定选择机器人手臂的3D打印部件。 daGHIZmo设计了一个名为EEZYbotARM的3D机器人手臂,并将文件上传到Thingiverse网站。
对于机械臂的3D模型文件,请访问链接。
基于在这些3D模型文件上,我们使用本地3D打印机插座制作了这些部件。质量非常好,尺寸也非常接近真实物体(不准确)。
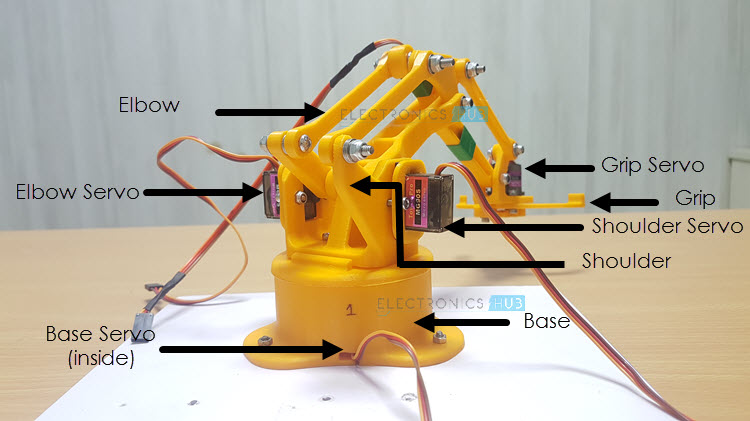
如果你观察上面的图像,我已经将机器人手臂的部分指定为基部,肩部,肘部和握把。随后,伺服电机也被称为基本伺服,肩部伺服,弯头伺服和手柄伺服。
电路设计
如前所述,电路的设计非常简单。 4个伺服电机的控制信号连接到Arduino UNO的4个PWM引脚,如下所示:基本伺服 - 引脚3,肩部伺服 - 引脚5,弯头伺服 - 引脚6和手柄伺服 - 分别是Arduino引脚9。
所有伺服电机均为6V电源,而Arduino UNO则为9V电源。 HC-05蓝牙模块的TX和RX连接到Arduino的RX0和TX0引脚,即引脚0和1。
注意:编程Arduino时请勿连接蓝牙模块。
组装3D打印机械臂部件
如果我解释机器人手臂3D部件的逐步装配程序,那将是一个非常冗长乏味的阅读。因此,我将发布已完成机器人的一些照片,并将制作关于如何组装机器人手臂的单独视频。在此期间,请看一下这些图像。
Arduino的Android应用程序&蓝牙控制机械臂
我们决定更进一步,设计一个简单的Android手机应用程序,而不是通过计算机使用电位计或串行通信控制机器人手臂。
下图显示了运行Android 6.0版的智能手机中的应用程序布局。但该应用程序已针对Android版本8.0进行了测试,并且运行正常。
每对箭头控制键有四对分别用于肩部,肘部,基部和握把舵。有一个程序按钮,使用它可以启用程序模式。有关项目工作的更多信息。
注意:
此应用程序使用Android手机的蓝牙功能。此应用目前无法在Google Play商店中使用,因为它仍在测试中。
截至目前,我们尚未开发适用于iOS的应用。
想要购买 这个项目? MAIL US
Arduino&的工作蓝牙控制机器人手臂
简单的3D打印,基于Android手机,Arduino&蓝牙控制机器人手臂是在这个项目中设计和开发的。我们现在将看到此机械臂的操作和工作。
在Android手机中安装应用程序并提供访问设备蓝牙所需的权限。如果蓝牙模块(HC-05)未与手机配对,请使用手机的蓝牙设置进行配对。
设备配对后,打开应用程序,它将自动列出配对的蓝牙设备。选择正确的蓝牙模块,如果一切顺利,您将进入主控制面板。
在这里,您可以看到机器人手臂的四个伺服电机的控制,即基地,肩膀,肘部和握把。使用相应伺服电机的箭头键并控制机械臂。这部分工作是机器人手臂的手动操作,每个动作必须手动调整。

下一步有趣的部分来了。您可以在中心看到一个名为“程序”的按钮。在操作的任何时候,如果按此按钮,机械臂将重置(移动到默认位置)并激活编程模式。
在此模式下,您可以对机械臂进行编程,以自动方式执行一系列任务。例如,如果您想从一个地方选择小物件并将其放在另一个地方,则无需一直手动调整值。
所有您需要的要做的是进入编程模式并教导机器人手臂按照一系列步骤来完成任务。编程机械臂后,您可以运行程序,它将循环这些已编程的步骤直到停止。
您也可以随时暂停自动操作并从同一点继续。此外,如果您希望退出编程模式并手动操作机械臂,您可以简单地“关闭”编程模式。
将很难清楚地解释机械臂的操作(手动和自动模式)在这里。所以,我会制作同样的视频。
Arduino& amp;蓝牙控制机械臂项目
此机器人手臂可以使用任何基于Android的蓝牙智能手机进行控制。
用于Android手机的专用应用程序,用于控制机械臂。
有两种操作模式:手动模式和自动模式。
对于常规或手动操作,您可以通过操纵机械臂的各个伺服电机的值来控制机械臂。
当编程模式为启用后,您可以对机械臂进行编程以实现全自动操作。
机械臂包含四个金属齿轮伺服系统和3D打印零件。
-
如何创建FPGA控制的机器人手臂2023-10-24 2748
-
用于Arduino Due的DIY Braccio机器人手臂护罩2023-06-14 1271
-
Arduino机器人手臂2022-12-30 837
-
机器人手臂使用哪种型号的泰和承比较合适2022-03-17 1112
-
怎么实现基于Android平台的双手臂机器人控制系统?2021-08-30 952
-
Arduino与树莓派打造Chatbot语音控制机器人手臂2021-03-16 1392
-
Hibot机器人手臂Float Arm可用于哪些应用环境2020-04-20 7755
-
在未来机器人手臂将可以替代人类的双手2019-09-17 2497
-
机器人手臂的典型机构有哪些2019-07-08 83091
-
STM32的医疗康复机器人手臂控制系统2018-08-22 4543
-
关于蓝牙控制Atmel制造的机器人手臂的介绍2018-07-09 4189
-
机器人手臂5种不同的运动组合2018-04-18 19888
-
蓝牙控制机器人端2013-07-20 4814
-
用意念控制的植入式机器人手臂2012-11-30 5239
全部0条评论

快来发表一下你的评论吧 !
