

STM32单片机以NEC协议实现红外遥控设计
控制/MCU
描述
红外的介绍、优点、缺点就不给大家说了,进入正题
一、红外遥控协议的的讲解
红外遥控的编码目前广泛使用的是:NEC Protocol的PWM(脉冲宽度调制)和Philips RC-5 Protocol的PPM(脉冲位置调制)
本文将以NEC协议实现红外遥控。
NEC协议的特征:
1、8位地址和8位指令长度;
2、地址和命令两次传输;(确保可靠性)
3、PWM脉冲宽度调制,以发射红外载波的占空比代表“0”和“1”;
4、载波频率为38KHz
5、位时间为1.125ms和2.25ms
NEC码位的定义:一个脉冲对应560us的连续载波,一个逻辑1传输需要2.25ms(560us脉冲+1680us低电平),一个逻辑0的传输需要1.125ms(560us脉冲+560us低电平)。而遥控接收头在收到脉冲时为低电平,在没有收到脉冲时为高电平,因此,我们在接收头端收到的信号为:逻辑1应该是560us低+1680us高,逻辑0应该是560us低+560us高。如下图:
NEC遥控指令的数据格式为:同步码头(引导码)+地址码+地址反码+控制码+控制反码。同步码是由一个9ms的低电平和一个4.5ms的高电平组成,地址码、地址反码、控制码、控制反码均为8位数据格式。按照高位在前低位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。下图是我们按下按键2时,从红外接收头端测到的波形:
在图中可以看到,在100ms之后,我们还收到了几个脉冲,这是NEC码规定的连发码(由9ms低电平+2.5ms高电平+0.56ms低电平和97.94ms高电平组成),如果在一帧数据发送完后,按键仍没有松开,则发送重复码(连发码),可以通过统计连发码的次数来标记按键按下的长短/次数。
二、解码程序解析(参考正点原子的代码)
在正点原子的代码中是利用定时器的输入捕获功能来实现遥控解码的,下面解析一下关键代码:
在该实验remote.h文件中,定义了3个函数:Remote_Init();、TIM4_IRQHandler();、Remote_Scan();。
1、Remote_Init();

这里要注意中断优先级,定时器4的两个中断,溢出(更新)中断,捕获事件中断的优先级是一样的。意思就是,他两谁也不能打断谁,例如A在执行时,B就不会产生中断。这里很重要,很重要,很重要!
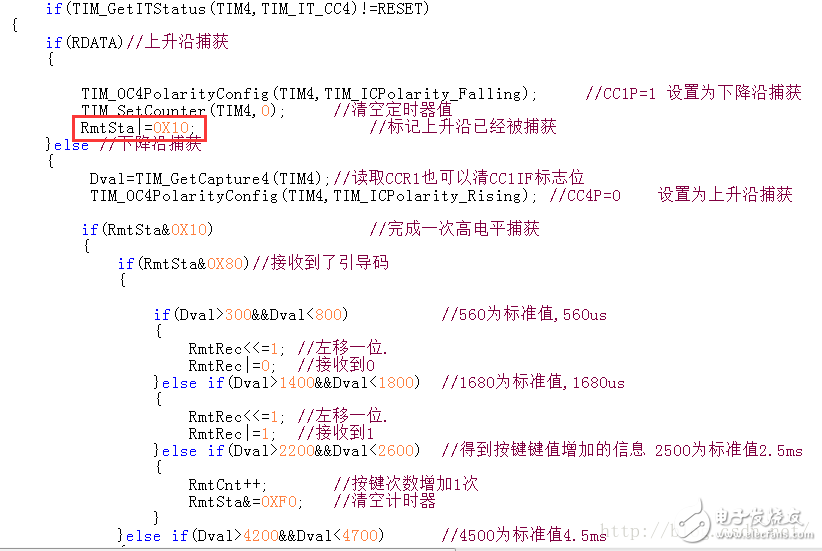
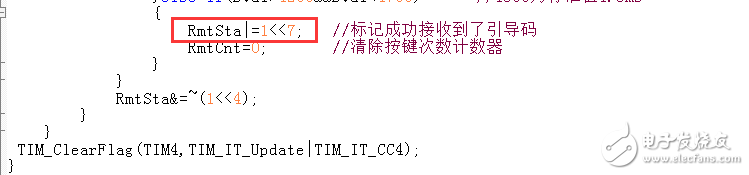
2、TIM4_IRQHandler();
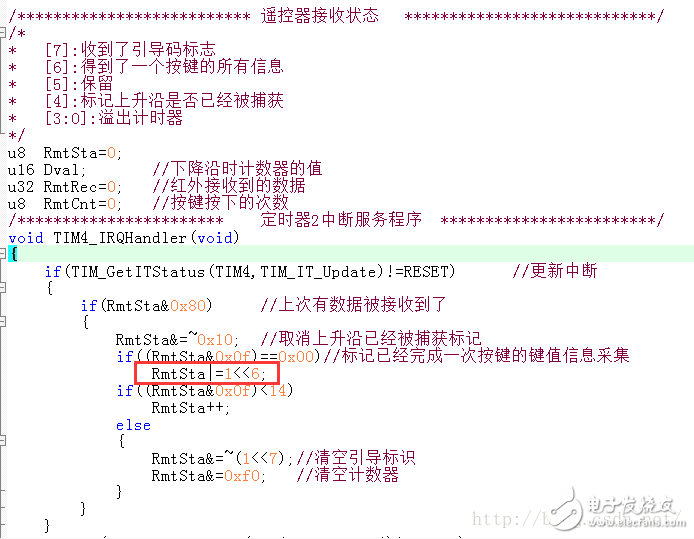
注意:遥控器发过来的码都是编好的,比如想破解遥控器编码,可以拿示波器去测接收端的码。
整个程序思路不难,就是对遥控器发过来的码进行解码,这里主要是两个中断的理解。
-
基于STM32单片机红外遥控实验使用库文件设计源代码2023-04-26 817
-
STM32 NEC红外遥控器解码的相关资料推荐2022-01-25 1733
-
红外NEC协议理解与可移植代码编写(适用于各种STM32单片机)2021-12-17 967
-
NEC协议红外遥控器的相关资料推荐2021-12-06 2103
-
STM32 NEC红外遥控器解码2021-11-30 1652
-
单片机:NEC 协议红外遥控器2021-11-23 1433
-
如何利用NEC协议实现红外遥控?2021-04-19 2499
-
红外遥控NEC协议介绍2020-12-21 1282
-
蓝牙学习型红外线遥控器(NEC协议编解码)2020-02-26 3853
-
单片机红外遥控系统2016-04-28 759
-
红外遥控单片机C程序2016-03-14 914
-
基于单片机红外遥控窗帘设计资料2016-01-14 784
-
单片机红外解码的问题2014-09-17 5210
-
基于单片机的红外遥控密码锁的设计与实现2008-11-26 937
全部0条评论

快来发表一下你的评论吧 !
