

新能源汽车传动系扭转振动抑制策略
描述
为什么要施加主动防抖控制?原因很简单:新能源汽车的电机到车轮之间没有传统内燃机车上的扭转阻尼减振器,所以传动系上的抖动无法被阻断和吸收,同时抖动通过壳体、悬置等耦合到车身,于是整车弥漫着农业重金属气息。With这种车,你无法步入新时代,因为你所有撩的套路都见光死,甚至连只想当个安静的美男子的愿望也灰飞烟灭,因此,才有主动防抖控制来抑制抖动。
那么没人车震,车里也没有内心住着缝纫机的抖腿一族,为啥车会抖呢?工程师说电机经减速器过半轴最后到车轮,这样一个传动系可以等效为二阶系统,见下图,大小惯量、刚度和阻尼等是它的参量,在阶跃扭矩输入条件下或者运行在固有频率区间,就会发生振动。
这么说有点抽象有点费脑细胞,举个例子:60千克的小明,虎虎生风的推了一把动他最后一根辣条的熊孩子,啪,熊孩子倒在了两米外;改天,他又去推了一把动他最后一根辣条的体重180千克隔壁老王,老王纹丝未动,而小明被弹了出去,踉踉跄跄几乎摔倒。嗯,大概就是这个意思……
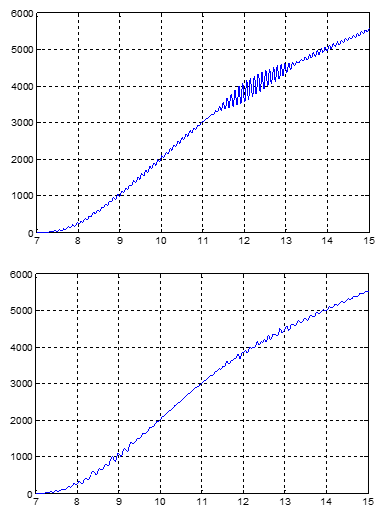
既然有抖动,那就想方法抑制它。抖动,其本质是传动系中存在弹性势能与机械能的交变,如上图所示为二阶系统上施加阶跃扭矩后,小惯量端轴系存在最大约±30牛米的交变力,其波动周期在100ms左右,而E-Drive系统的扭矩响应周期为数十毫秒量级,快于波动速度数倍,因此,通过主动补偿与转速波动反相位的扭矩来抵消交变弹性势能,进而抑制转速波动就是可行的。
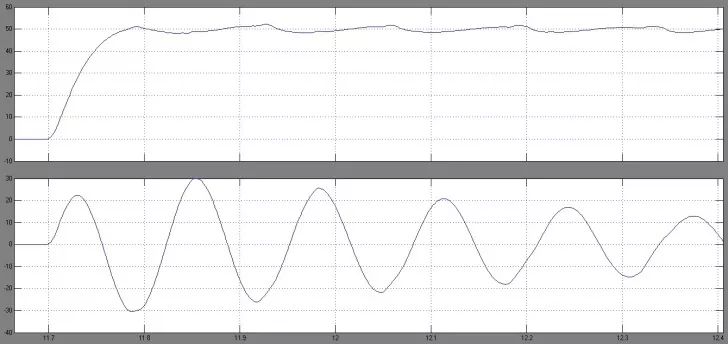
下图是实践后得到的进行主动防抖控制前后的结果对比图(图中为电机转速曲线),可见,主动防抖是有效的,对得起工程师身体被掏空的付出。
会吃的小伙伴可能会有疑问:你告诉我这东西好吃,但是没说怎么吃……这个就各家有各家的吃法了,依客官口味,是香煎、是糖醋,还是酸辣,都来噻。
在补偿扭矩前,需要先获得转速波动量。可以采用模型法,类似于对照现实世界,建立虚拟的平行世界。现实世界中难以窥探的信号,在平行世界中可以观测并输出,这其中就包含转速波动量。
也可以采用特定的频率检出法,下图,为经过特定频率检出法后得到的波动转速。
甚至可以采用传感器实测波动的方法,但是这种方法涉及较大的硬件成本投入(硬线信号或高速CAN信号),故市场上几无应用,不做深究。
基于上述方法得到转速波动量之后,再经过一定的策略获得补偿扭矩,最终传动系的抖动被抑制,抖动的无限可能坍塌为一种:平顺输出,新老司机尽开颜(享受丝滑的驾乘体验)。
当然,以上控制套路可以搞定很多问题,但绝不是万能的,实际车辆发生抖动的原因非常复杂,例如混动车上的发动机、多档变速器等因素,需要具体情况具体分析。定位抖动源头后,协调相关工程师,撸起袖子加油解决。如果解决不了,那就请大家吃一顿火锅,一顿不行,那就两顿……
-
干货分享--新能源汽车三电系统详解2022-04-04 6426
-
回收新能源汽车,回收电动汽车,回收新能源汽车电池模组,回收新能源汽车电机, 回收新能源汽车软包电池组2021-12-13 2104
-
回收新能源汽车电池包,回收新能源汽车电池 , 回收新能源汽车,18650电池组回收2021-12-02 1666
-
回收新能源汽车,回收电动汽车,回收库存新能源车,回收库存电动汽车,回收新能源汽车电池2021-11-04 1664
-
各种电动汽车回收,各种新能源汽车回收,各种新能源汽车回收,各种新能源汽车电池模组回收2021-10-02 2258
-
回收新能源汽车电池包,回收新能源汽车电池 回收新能源汽车18650电池组 回收新能源汽车软包电池组2021-09-24 1561
-
新能源汽车回收业务|新能源汽车电池包回收|新能源汽车电池模组回收|库存新能源汽车回收|新能源汽车高价回收2021-09-14 9155
-
氮化硅基板应用——新能源汽车核心IGBT2021-01-27 1753
-
混合动力汽车双模式多级齿轮动力传动机构扭转振动的原因2020-12-24 1730
-
新能源汽车的路试问题怎么解决?2019-08-13 4815
-
新能源汽车的电池如何养护2019-05-10 3129
-
电池安全保障新能源汽车的发展2016-01-11 4627
-
汽车传动系,汽车底传动系是什么意思2010-03-11 3098
全部0条评论

快来发表一下你的评论吧 !
