

PAM4信号的一些测试和测量方面的挑战
描述
PAM4编码提供了串行加倍比特率的优势数据通道,通过将电压电平从2增加到4来实现。这是一个相当复杂的调制方案,所以毫无疑问它会带来一些测试和测量方面的挑战。
想象一下,如果你愿意的话,可以使用普通的NRZ眼图,这是一个理想的调整方案。它没有抖动,只有有限的上升和下降时间。
PAM4信号讨论中经常出现的第一件事是:如何恢复时钟?在NRZ信号的情况下,时钟恢复的目的是精确定位交叉点或信号超过阈值的位置(参见图1中左侧的绿色圆圈) 。
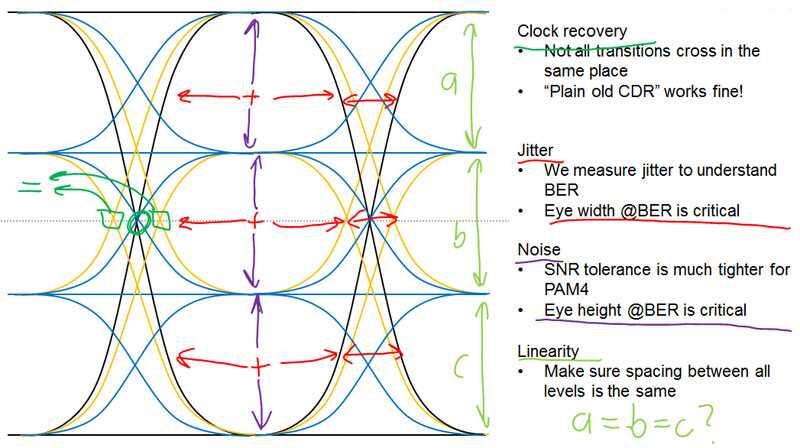
图1PAM4信号带来的主要测试挑战
使用PAM4信号时,它是一个类似的情况除了有四个电压电平而不是两个电压电平的事实。两个中间级别意味着更多的信号转换:从底层到下一层更高,从第三层到第三层,从第三层到顶部(蓝色轨迹c,b和a分别) ,在图)中。
蓝色迹线b与覆盖整个幅度范围的黑色迹线(在绿色圆圈处)相交。有些转换根本不会超过任何阈值(顶部和底部三分之一处的蓝色迹线),但可能没有那些转换超过阈值的转换数量。因此,考虑到这些转换,可以假设传统的时钟恢复是足够的。但是然后有从底层到第二层的转换,从顶层到第二层的转换(黄色迹线)。即使在完美的世界中,这些过渡也不会在与其他过渡相同的地方(绿色圆圈)超过阈值。因此,问题是这些转变是否会影响时钟恢复?它们会导致时钟抖动吗?
答案是“不是真的”。如果我们假设绿色圆圈的左右两侧的过渡数量大致相等,并且比绿色圆圈中的任何一个过渡更多,那么左右两个黄色交叉点相互抵消。传统的时钟恢复工作正常。
说到抖动,那些黄色交叉口与绿色圆圈的理想交叉位置的接近确实引发了问题。参考图右侧的小红色箭头,如果习惯于分析NRZ信号,那些时间间隙确实看起来像抖动。
如何分析抖动PAM4信号?首先,让我们不要忘记分析抖动的最终目的,即确定我们预测的误码率。我们想知道我们需要对信号进行采样以最大限度地减少误码(理想情况下,在三只眼睛中心的红色十字处)。因此,我们真正关心的是眼睛宽度和接收器中采样器的位置。构建眼睛的轨迹数量不是问题,而是在给定误码率下的眼睛宽度,而不是对交叉口正在发生的情况进行深入分析。另一个挑战是PAM4领域是噪音容限。我们拥有33%的幅度,而不是具有完整的幅度范围。因此,噪声分析变得更加重要。正如我们想要了解给定BER下的眼宽以了解水平采样器的最佳位置,我们还需要知道垂直放置它的位置。给定BER下的眼高是另一个关键参数。最后,与NRZ相比,PAM4的某些新特性是线性概念。在NRZ中,只有两个振幅水平需要担心,而PAM4给出了这两个中间振幅水平。距离a,b和c是否相同,以便水平均匀分布,我们所有三只眼睛都有最大开口? a = b = c吗?这就是PAM4背景下“线性”的含义。
- 相关推荐
- 热点推荐
- PCB打样
- 华强PCB
- pam4
- 华强pcb线路板打样
-
最完美的PAM4标准通信数据测试方案大全2017-03-29 14233
-
泰克53GBd PAM4电测试方案亮相OFC20222022-04-01 3490
-
泰克将推最全面的400G PAM4成套测试解决方案2018-03-13 1945
-
PAM4 PRBS测试简介2025-01-15 3679
-
PAM4设计挑战及其对测试的启示2018-09-30 3381
-
一分钟了解下一代数据中心高速信号互联技术 PAM42019-02-26 5854
-
400G AOC产品的核心技术PAM4和DSP2019-03-19 4467
-
基于PAM4调制的400G光模块解析2021-02-20 5934
-
PAM4和NRZ信号的区别是什么2021-03-11 15990
-
本周推荐:关于200G PAM4光模块(推荐分享)2021-06-24 2458
-
问答专栏丨PAM4常见问题解答2021-06-28 3333
-
泰克助力实现400G PAM4电接口自动化测试2017-07-26 2109
-
如何测试PAM4信号2018-03-14 8854
-
PAM4找到应用程序的一些方式及PAM4测试设置因应用程序而异2019-08-08 4815
-
关于NRZ与PAM4信号差异2020-07-02 37188
全部0条评论

快来发表一下你的评论吧 !
