

关于利用MATLAB 和 Simulink 制作机器人的设想和分析
描述
机器人技术研究人员和工程师可以使用 MATLAB 和 Simulink 设计和优化算法,为真实系统建立模型,并自动生成代码——所有过程均在一个软件环境下完成。
MATLAB 和 Simulink 可以实现:
用您开发的算法连接并控制您的机器人
开发与硬件无关的算法并连接到机器人操作系统(ROS)
连接一系列传感器和执行机构,以便发送控制信号或分析多种类型的数据
为嵌入式目标(如微控制器、FPGA、PLC 和 GPU)自动生成 C/C++、VHDL/Verilog、ST 语言和 CUDA 等语言的代码,无需手动编码
使用预建硬件支持包连接Arduino 和 Raspberry Pi 等低成本硬件
创建可共享的代码和应用程序,简化设计评审过程
使用已有代码对接现有机器人系统
设计硬件平台

设计与分析三维刚体机械(如车辆平台和机械臂)和执行机构动力组件(如机电或流体系统)。您可以将 URDF 导入 Simulink,也可以从 SolidWorks 和 Onshape 等 CAD 软件中导入三维模型到 Simulink,从而直接使用现有的 CAD 文件。。运用电气、液压、气动以及其他组件建立多领域系统模型 ,并在模型中添加约束(比如摩擦)。
采集传感器数据
您可以通过 ROS 连接传感器。特定传感器(如摄像机、激光雷达和 IMU)的 ROS 信息可以转换为 MATLAB 数据类型,用于分析和可视化处理。
您可以让常见的传感器处理流程实现自动化处理,例如导入和批处理大型数据集、校准传感器、降噪、几何变换、分割和注册。
感知环境
您可以通过内置的 MATLAB 应用程序交互式执行目标检测和跟踪、运动估计、3D 点云处理和传感器融合等操作。运用深度学习进行图像分类、回归以及特征学习(使用卷积神经网络 CNN)。
自动将您的算法转换为 C/C++、定点、HDL 或 CUDA 代码。
规划和决策
通过同步定位与地图构建(SLAM),使用激光雷达传感器数据创建环境地图。
通过设计路径和运动规划算法约束环境导航。使用路径规划器,根据任意给定地图,计算避障路径。
设计算法,让您的机器人在面对不确定性时做出决策,并在协作环境中进行安全操作。使用状态机,确定决策所需的条件和行动。
设计控制系统
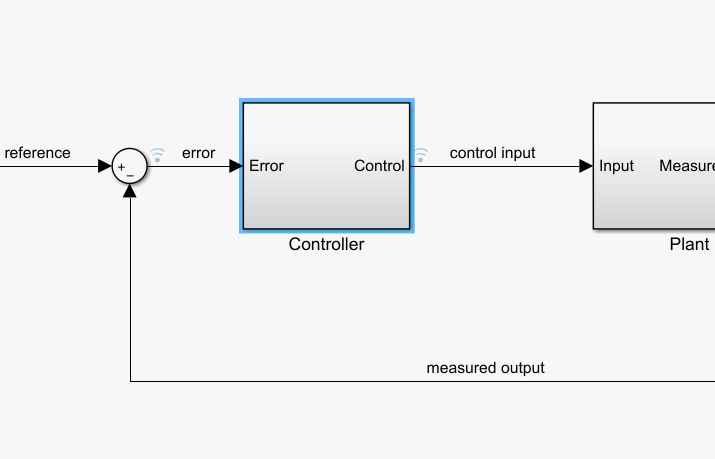
您可以使用算法和应用程序,系统地分析、设计和可视化复杂系统在时域和频域内的行为。
使用交互式技术(如波德图和根轨迹法)自动调整控制器参数。优化增益调度控制器并指定多个优化目标,例如参考信号跟踪、干扰抑制和稳定性裕度。
代码生成和需求追溯可帮助您验证系统及其合规性。
与其他平台和目标通信
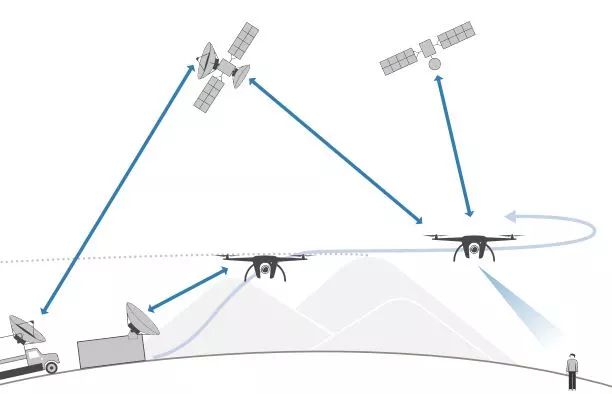
使用 CAN、EtherCAT 和 802.11 等协议与嵌入式目标通信。使用数字、射频和其他无线技术 ,连接到支持 TCP/IP、UDP、I2C、SPI、MODBUS 以及 Bluetooth(蓝牙)等串行协议的硬件。
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 806
-
将Simulink模型与Lego机器人结合使用2021-12-20 1917
-
刚柔软机器人设计与仿真分析实例解析2021-09-02 4562
-
基于Matlab的机构与机器人分析资料下载2021-05-25 1923
-
机器人未来设想2020-11-22 5787
-
机器人基础书籍2019-05-22 3659
-
智能小车机器人制作大全2019-05-05 9955
-
自律型机器人制作入门.基于Arduino2016-06-23 5585
-
请教利用树莓派制作六足机器人的问题2015-11-10 7903
-
matlab与机器人2014-05-30 4758
-
分享 《机器人制作天空宝典》,OHM 自律型机器人制作2013-05-06 12210
-
制作语音机器人,求助。2012-08-24 4604
-
机器人竞技系列之机器人制作宝典2012-08-15 4663
-
机器人制作宝典2012-06-09 11006
全部0条评论

快来发表一下你的评论吧 !
