

关于设计永磁同步电机控制器的性能分析和介绍
描述
永磁同步电机的设计中,有两大主要的设计难题:
电机驱动
电机驱动部分的Simulink模型搭建、仿真与验证以及代码生成。由于国内新能源车的发展迅猛,很多电车类客户在 AUTOSAR 和 ISO26262 方面有刚性需求。
被控对象模型
长久以来,基于模型的设计(MBD)已经在电机驱动开发人员的标准配置。但被控对象层面的模型化,相对控制层面的建模来说,一直是一个难题。
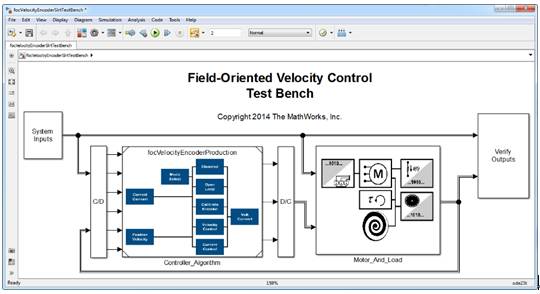
有了被控对象模型和电机驱动器模型,将两者形成闭环,这才能形成一个真正意义上的MBD。无论在早期的模型在环测试(MIL)、软件在环测试(SIL),还是在后期的处理器在环测试(PIL)、硬件在环测试(HIL),闭环仿真将在极大程度上减少设计错误,增加开发效率,降低开发成本。
永磁同步电机设计
永磁同步电机被控对象建模
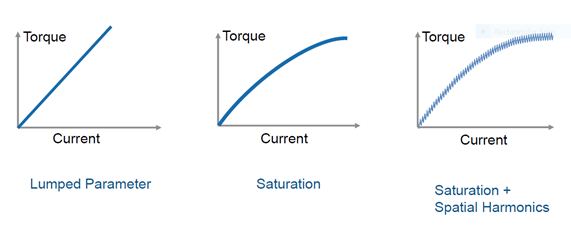
MathWorks能提供三种不同精度的永磁同步电机被控对象模型:
线性模型—转矩和电流为线性方程
非线性饱和模型—转矩和电流的关系为非线性饱和型
饱和加空间谐波模型—转矩和电流的关系为饱和加空间谐波型
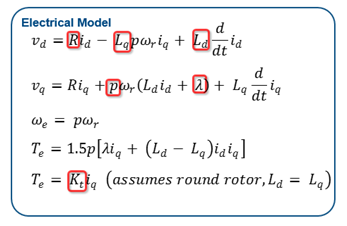
线性模型的建立
Simulink 中的 Simscape Power Systems 以及 Powertrain Blockset 都提供了线性模型供设计参考。
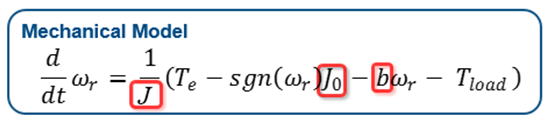
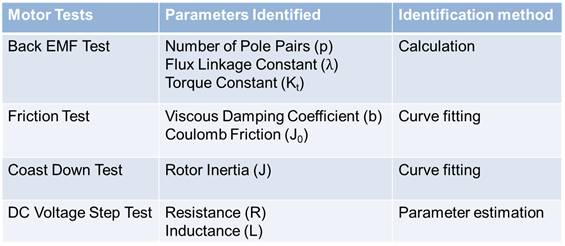
线性模型所需参数:
如何获取这些参数:
非线性饱和模型的建立
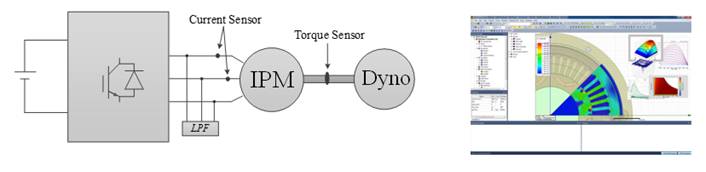
Simulink 中的 Powertrain Blockset 提供了非线性饱和模型供设计参考。用户可通过两种方式获取数据后填充这些模型(即填充 Nonlinear Flux 和 Current 表格)
这两种获取数据方式为电机台架测试(Dyno Testing)和有限元分析(FEA)。
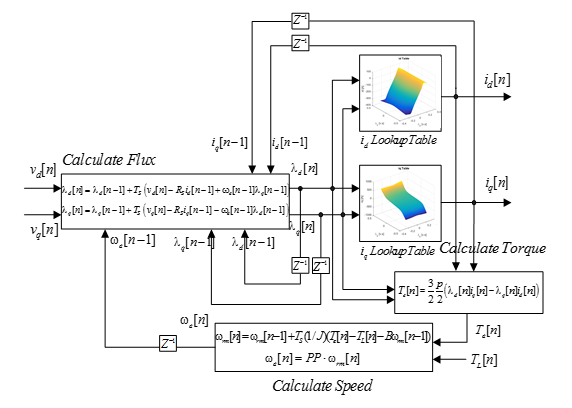
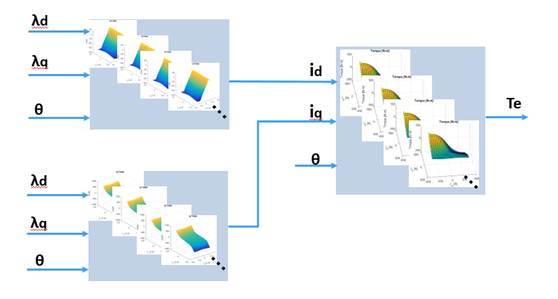
饱和加空间谐波模型的建立
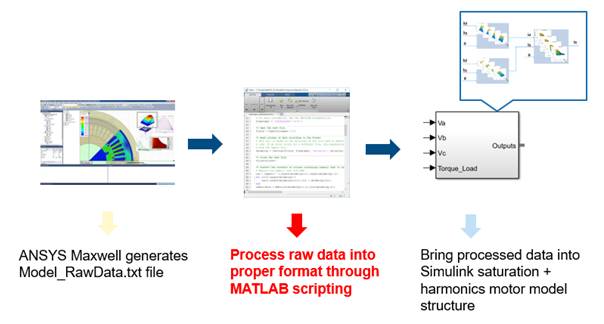
饱和加空间谐波模型的建立只有通过 FEA 的方式获得,MathWorks 工程师为用户提供了:
基本的饱和加空间谐波模型的Simulink模型框架
通过不同FEA(ANSYS,JMAG 等)工具获取数据后的处理脚本(处理导入数据至模型框架)
电机驱动的基于模型的开发
电机驱动的基于模型的开发可以从如下几点来考虑:
驱动器建模、仿真和代码生成
符合 AUTOSAR 标准的驱动器开发
ISO26262 标准的合规
电机驱动的建模、仿真、测试和代码生成
电机驱动的建模、仿真和测试一般是通过Simulink和Stateflow来完成。在建模和仿真的过程中可注意如下几点:
可通过 Simulink Check 进行模型的静态检测,例如 MAAB、ISO26262、MISRA 等检查规则
可通过 Simulink Test 进行模块级别单元测试,同时可通过 Simulink Coverage 检测模型的覆盖率
可通过 Simulink Design Verifier 进行模型死区检测和自动生成一些测试用例(用来补足模型的测试覆盖率)
以上活动如果有驱动器和电机模型形成闭环,一般称之为 MIL(Model-In-the-Loop),MIL 主要考察模型的逻辑正确性。
在 MIL 通过之后,可考虑进行:
SIL(Software-In-the-Loop)
将驱动器的部分通过 Embedded Coder 生成 C 代码,然后将 C 代码编译后和电机模型联合测试。SIL 主要考察 C 代码生成的正确性。
PIL(Processor-In-the-Loop)
将驱动器的部分生成代码加载到处理器上,通过外围接口和电机模型联合测试。PIL 主要考察 C 代码到汇编语言的编译链接以及在处理器上执行的正确性。
HIL(Hardware-In-the-Loop)
将成品电机驱动器和在高速实时工控机上运行的电机模型,通过实时总线进行联合测试。HIL 主要考察在实时环境下电机驱动器的逻辑和性能。
MathWorks 提供了基于 TI C2000 的永磁同步电机驱动器的开发示例,用户可在模型仿真的基础上,产生应用层 C 代码。应用层代码通过调用底层驱动模块,在 TI CCS 环境下编译链接,并可直接运行在 TI C2000 平台上。
机
符合AUTOSAR标准的驱动器开发
AUTOSAR 是一种汽车电子的标准架构,由 ASW、RTE、BSW 等层次组成。Simulink 可通过 Embedder Coder 产生符合 AUTOSAR 架构的代码,该代码直接调用 RTE 接口。
一般来说,Simulink 支持两种开发模式:
自上而下模式
Simulink 可以导入如 Davinci Developer 等基于标准 AUTOSAR 的架构工具的 ARXML 文件,然后在此基础上进行 ASW 内部的 runnable 的设计,在设计完成后可生成可调用 RTE 的代码。
自下而上模式
Simulink 可以已经做好的控制模型,将原有的非 AUTOSAR 输入输出接口配置成 AUTOSAR 的输入输出接口,形成标准的 ASW。此后,可生成可调用 RTE 的代码。
Simulink 对 AUTOSAR 的支持可通过从网上下载 AUTOSAR 支持包来完成,无需额外的许可证支持。
ISO26262 标准的合规
ISO26262 为车用电机企业目前比较关注的一部关于功能安全的标准。MathWorks 产品对于 ISO26262 标准的合规主要体现在第六章软件部分和第八章工具和支持过程。
在第六章中,ISO26262 提出了 15 个表格。每个表格中针对不同的 ASIL 等级,对一些软件开发过程中的技术做了不同层次的要求。用户需要证明其软件开发过程符合这些要求。MathWorks 在 IEC Certification Kit 中的 Model-Based Designfor ISO26262 文档中对于每一个表格都有相应的技术应对。
第八章中,ISO26262 对开发过程中使用到的软件做了一些规定。MathWorks 的
Embedded Coder,Simulink Design Verifier,Simulink Check,Simulink Coverage,Simulink Test,PolySpace Bug Finder,PolySpace Code Prover 都被 TUV 严格做了以下审核和认证:
SUV 出具了对这些产品的工具认证报告
MathWorks 推荐了这些产品的使用流程
TUV 针对以上使用流程的若干使用场景做了 TCL(工具置信度)的事先划分
在实际认证过程中,如果为 TCL1 则无需做额外的工具资格认定(tool qualification),例如:Embedded Coder 如果严格按照 MathWorks 推荐的流程来使用,则为 TCL1。
如果为 TCL2 或者 TCL3,则用户需要做工具资格认定,MathWorks 提供了工具资格认定所需的测试用例,用户只需要运行即可。
用户须为以上被预认证过的产品提供一份 TQP(Tool QualificationPackage) 和 CDT (Conformance Demonstration Template),用来说明该产品是如何被资格认定的。MathWorks 提供了文档模板。
以上的证书、模板和测试用例都可在 IEC Certification Kit 中找到。
针对电机企业的设计需求,MathWorks 提供专业咨询服务,包括:电机控制MBD咨询、电机高精度模型建立咨询、流程改进咨询(以ISO26262为例)等。
-
FOC算法的永磁同步电机控制器的设计与验证2025-03-07 3578
-
改进粒子群算法的永磁同步电机PID控制器2025-05-28 286
-
怎么设计永磁同步电机控制器?2019-08-14 3033
-
太实用!永磁同步电机控制方案及MATLAB仿真模型大全2020-06-30 10280
-
现代永磁同步电机控制原理及MATLAB仿真精选资料分享2021-07-09 2695
-
永磁同步电机控制原理分析及MATLAB仿真应用2021-08-27 2540
-
由浅入深的介绍永磁同步电机转动的控制方法2022-10-12 3208
-
基于混沌同步的永磁同步电机控制2010-11-22 636
-
利用FPGA的永磁同步电机控制器原理及设计2010-03-17 3932
-
QEP控制的永磁同步电机2015-10-30 1210
-
永磁同步电机负载扰动控制器设计2016-05-04 658
-
交流永磁同步电机介绍及其控制系统设计2017-01-21 1212
-
单片机的永磁同步电机控制2018-01-30 1553
-
基于微控制器的永磁同步电机磁场定向控制2021-06-30 1718
-
1.0电机的分类及永磁同步电机的控制技术介绍2021-11-08 1634
全部0条评论

快来发表一下你的评论吧 !
