

关于Simscape的建模和仿真多域物理系统的分析和介绍
描述
Simscape提供了多物理域系统的建模仿真平台,包括机械、电气、液压和其他物理域。您可以使用它提供的各物理域基础模块来组装各种物理模型,如电机、反向运算放大器、液压阀和棘轮机构。因为 Simscape 组件之间使用物理连接,所以模型与开发的系统结构是匹配的。
Simscape 模型可用于开发控制系统和测试系统级性能。您可以使用基于 MATLAB 的 Simscape 语言来扩展库;使用 MATLAB 变量和表达式来参数化模型;以及为 Simulink 中的物理系统设计控制系统。Simscape 可支持 C 代码生成,可以将模型部署到其他仿真环境,如硬件在环 (HIL) 系统。
主要特性
提供单一建模环境,可用于对机械、电气和液压、热场以及其他多域物理系统进行建模和仿真
用于开发自定义组件的物理模块库以及数学运算库
基于 MATLAB 的 Simscape 语言,支持使用文本定义物理建模组件、域和库
提供参数和变量的物理单位,并自动进行单位转换
仿真的模型可以包括相关物理建模工具提供的模块,而无需购买这些建模工具
支持 C 代码的生成
Simscape 可用于优化系统级性能以及被控对象建模。您所创建的模型支持您的整个开发流程,包括硬件在环仿真。
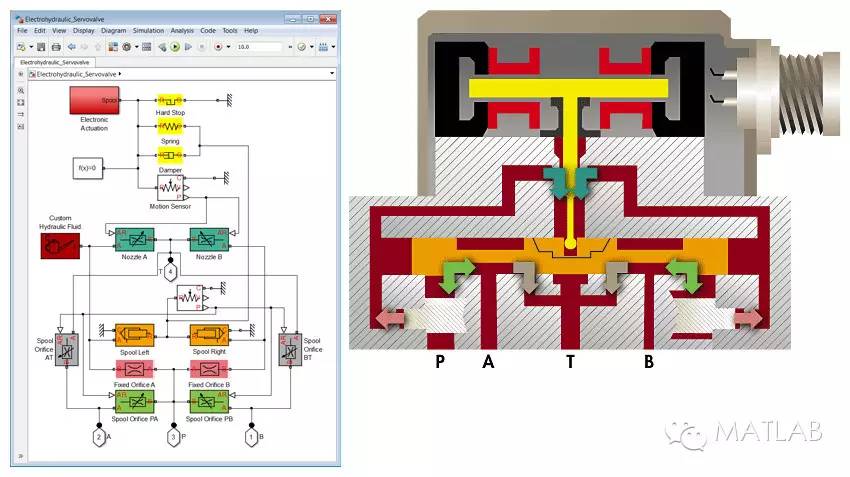
电液伺服阀的截面图(右),使用的喷嘴挡板放大器以黄色高亮显示。Simscape 模型(左)中彩色模块与彩色箭头对应,这些箭头代表典型的液体流动路径。
主要功能
1.物理系统建模
利用 Simscape,建立系统模型就如同装配物理系统一样。Simscape采用物理网络方法(也称为非因果性建模)进行模型构建:模块相当于物理元器件,比如如泵、电机、运算放大器等。模块之间的连线相当于物理连接,用于传递能量。通过这种方法,您描述的是系统的物理结构,而非底层的数学原理。模型与原理图非常相似,Simscape 可以从建立的模型中自动构造微分代数方程(DAE),描述系统动态性能。这些方程与 Simulink 模型的剩余部分集成,直接求解 DAE。同时求解不同物理域组件变量,避免代数环问题。
2.组件库
您可以使用 Simscape 基础库中的基本元件来创建自定义组件模型。
构件机械组件模型
构建电气组件模型
构建液压组件模型
构建热效应模型
使用物理信号
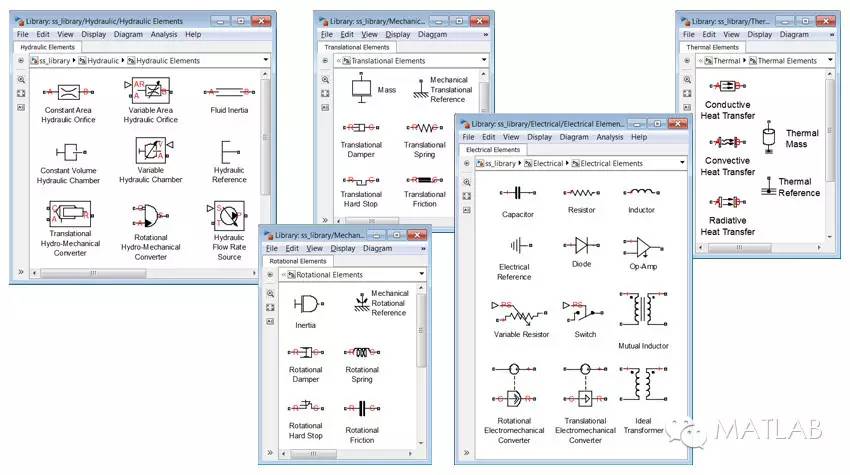
用于创建自定义组件模型的 Simscape 电气、机械、液压和热模块库。
3. Simscape 语言
Simscape 语言可用于定义新的物理域,以及创建自己的物理建模组件和库。它基于工程师们非常熟悉的MATLAB编程语言为基础。通过这种面向对象的建模语言,您可以定义自定义组件,包括参数化、物理连接端口以及非因果隐式 DAE 方程。您也可以使用 MATLAB 来分析参数值,进行一些初等运算以及初始化系统变量。这些 Simulink 模块及其对话框都是从Simscape源文件自动创建而来。
您创建的组件可以重用 Simscape 已定义的物理域,以确保您的组件与标准Simscape组件兼容。您也可以添加自己的物理域。可以自动创建 Simscape 组件和物理域的库,这样就可以在团队之间共享这些模型。也可以为包含自定义组件的 Simulink 模型生成 C 代码。
通过使用 Simscape 语言,您可以精确指定您的物理组件模型中需要考虑哪些影响。因此您可以在模型逼真度和仿真速度之间进行权衡。
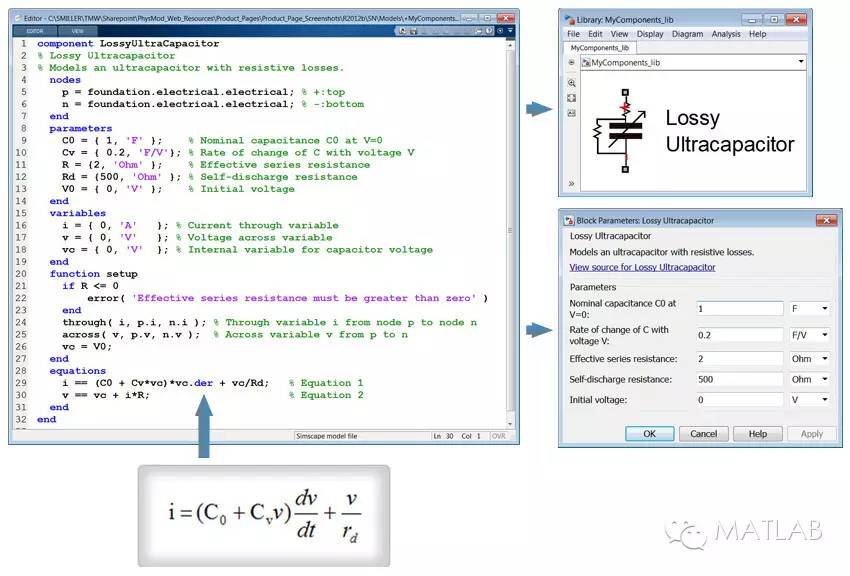
使用 Simscape 语言创建考虑能量损失的超级电容。图示方程(底部)使用 Simscape 语言(左)的实现方式。Simulink 模块图(右上)及其属性对话框(中)都是从 Simscape 源文件自动创建而来。
4.使用 Simscape 编辑模式共享模型
在 Simscape 编辑模式下,您可以使用 Simscape 及其附加工具箱来进行物理建模和仿真: SimDriveline、SimElectronics、SimHydraulics、SimMechanics 和 SimPowerSystems。即使只有 Simscape 许可证,只要您机器上安装了附加工具箱,您也可以打开、仿真、参数调节以及保存含有附加工具箱模块的模型。您不需要购买额外的许可证,就可以在团队之间共享您的模型。
5.将 Simscape 模型转换为 C 代码
Simscape 可以将您的模型转换为 C 代码,以确保可使用 Simulink 加速模式来缩短仿真时间。您也可以使用 Simulink Coder 将 Simscape 模型转换为 C 代码,这样就可以:
实时仿真,进行 HIL 测试
将您的模型集成到其它仿真环境中
将 Simscape 模型编译为独立的可执行文件,这样可加速您的分析过程,比如参数分析和 Monte Carlo 仿真
将 Simscape 模型转换为 C 代码:通过模型创建一个独立可执行文件,对可变参数模型的仿真进行加速。
将模型配置为实时运行,您可以使用硬件在环测试取代昂贵的原型机来进行系统测试。可以在开发流程的早期发现错误,降低成本和缩短设计周期。
以 HIL 测试取代硬件原型对控制算法进行测试合并了 MathWorks 物理建模产品模块的 Simulink 模型转换为 C 代码并下载到 Bachmann electronic M1 硬件控制器上。
6.MATLAB 与 Simulink 集成
Simscape 扩展了对物理系统建模的功能。您可以使用物理连接的方式搭建物理对象模型,还可以将其直接连接到使用信号流的方式搭建的 Simulink 控制模型。Simscape 模型还可以直接连接至 MathWorks 其它行业工具箱或者是其它物理的物理建模工具,这样你就可以模拟出不同物理域之间的复杂耦合关系。
您可以使用 MATLAB 来参数化模型、自动化仿真测试、分析输出数据以及优化系统性能。这样,您便可以在 MATLAB 和 Simulink 环境下测试整个系统(多物理域对象模型和控制器)。
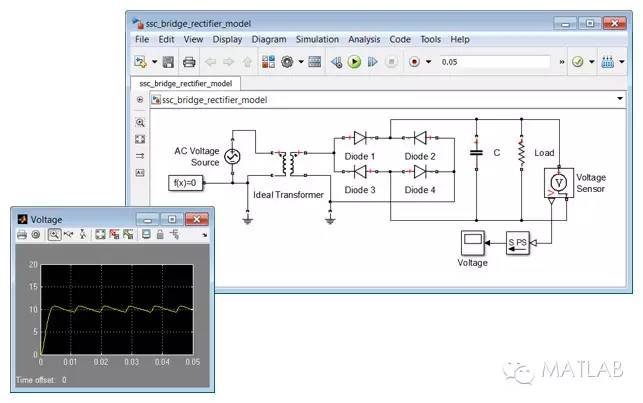
将 120 伏交流电压转换为 12 伏直流电压的全波桥式整流器的 Simscape 模型(顶部)。此模型可用于为特定负载确定电容值。下图(底部)显示了直流电压的波动。
-
VirtualLab Fusion:系统建模分析器2025-01-04 1032
-
仿真分析误差来源及减少建模误差的方法2024-12-24 3599
-
VirtualLab:系统建模分析器2024-12-19 670
-
Simulink与 Simscape的结合使用2024-12-12 3456
-
基于Simscape Battery模型的电池系统建模与仿真2024-09-05 5330
-
如何使用Simscape Multibody的物理建模模块来建立倒立摆模型?2021-07-07 2274
-
MATLAB Simulink中Simscape的使用手册详细说明2020-03-12 7084
-
关于建模和仿真多域物理系统的分析和介绍2019-09-18 7058
-
MathWorks在Simscape中更新的新功能的分析和介绍2019-09-17 3767
-
信息物理系统共性技术测试床案例分析2018-03-23 8120
全部0条评论

快来发表一下你的评论吧 !
