

关于TOF和双目视觉的差异性分析
电子说
1.4w人已加入
描述
那同样是获取场景中物体距离摄像头物理距离的摄像方案,他们之间有什么不同的呢?
今天小编就跟大家来对比一下TOF 与 双目视觉。
TOF Vs 双目视觉
双目视觉
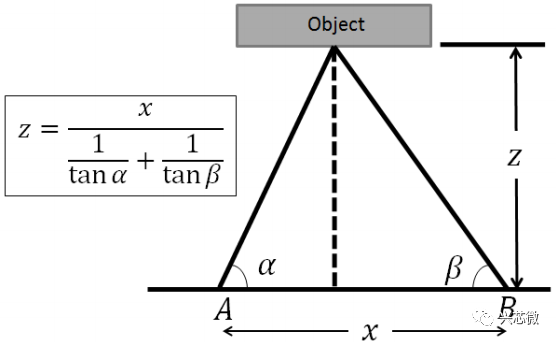
双目立体视觉测距的原理和人眼类似,通过计算空间中同一个物体在两个相机成像的视差就可以根据如下三角关系计算得到物体离相机的距离:
但是说起来容易,算法实现比较困难,双目立体视觉测距算法的核心就是寻找对应关系。可以理解为给定一个相机拍摄的图片中的任意一个像素点,如何在另外一个相机拍摄的图像中找到和它对应的像素点,这个过程需要特征提取、特征匹配等一系列复杂的算法。但是由于光照变化、光线明暗等外在因素的影响,拍摄的两张图片差别可能比较大,这会对特征匹配算法提出很大的挑战。如下图是在不同光照条件下拍摄的图片:
另外,如果拍摄的物体缺乏纹理和细节(比如拍摄一张白纸)的话,也很难进行特征匹配。这些都对算法的鲁棒性提出了很大的挑战。
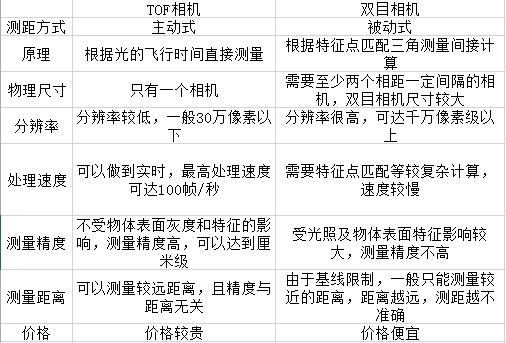
虽然TOF相机和双目立体视觉都能实现测距的功能,但是它们还是有很大不同,在此我做了了简单的表格如下:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
双目视觉在智能驾驶领域的应用2025-07-09 1605
-
双目立体视觉是什么?单目视觉与双目立体视觉的区别?2023-08-17 6423
-
线性稳压器和开关式稳压器的特性有什么差异性?2021-03-08 2985
-
双目视觉简介及算法一般流程2020-10-23 13865
-
电流法的测试结果差异性影响分析2020-09-28 2715
-
LabVIEW双目视觉 【转载】2020-03-02 9288
-
钜芯发布业内首颗智能双目视觉芯片2017-10-26 11470
-
基于SoC的双目视觉ADAS解决方案2016-11-05 3759
-
一种基于图像处理的双目视觉校准方法2015-12-18 938
-
【WRTnode2R申请】双目视觉随动平台2015-09-10 2561
-
双目视觉传感器的现场标定技术2012-03-02 992
-
双目视觉立体匹配算法研究2010-08-14 1473
-
模拟电路设计使HDTV体现出差异性2009-10-29 891
-
基于神经网络的双目视觉传感器建模2009-07-10 435
全部0条评论

快来发表一下你的评论吧 !
