

简述摄像头工作原理工程分析
电子说
1.4w人已加入
描述
|
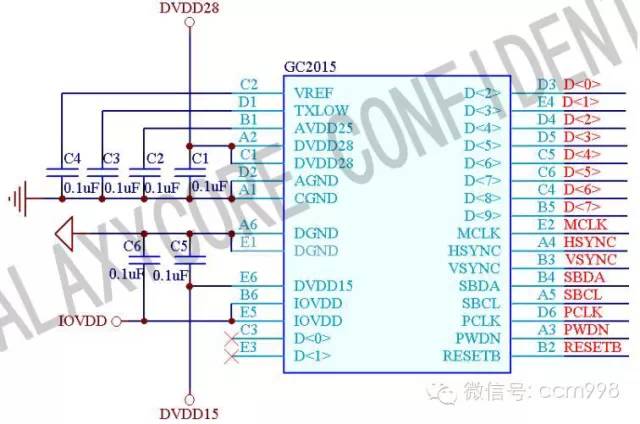
一、摄像头工作原理 摄像头对于模组工程是那么的熟悉,有多少人又真正了解摄像头从硬件到软件的工作流程。我们了解摄像头的工作原理,对于开展工作,辅助的解决遇到的一些问题,很有帮助。下面我们析摄像头从寄存器角度是怎么工作的。如何阅读摄像头规格书(针对驱动调节时用到关键参数,以格科GT2005为例)。 每个摄像头的sensor都有Datasheet规格书,也就是一个器件所有的说明,精确到器件每一个细节,软件关心的寄存器、硬件关心的电气特性、封装等等。单单驱动方面,我们只看对我们有用的方面就可以了,没必要全部看完。主要这样资料全都是鸟语(En),全部看完一方面时间上会用的比较多,找到关键的地方就行了。 1、camera的总体示意图如下:控制部分为摄像头上电、IIC控制接口,数据输出为摄像头拍摄的图传到主控芯片,所有要有data、行场同步和时钟号。GT2005/GT2015是CMOS接口的图像传感器芯片,可以感知外部的视觉信号并将其转换为数字信号并输出。 我们需要通过MCLK给摄像头提供时钟,RESET是复位线,PWDN在摄像头工作时应该始终为低。PCLK是像素时钟,HREF是行参考信号,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,VSYNC和PCLK同步传输数字图像信号。 数据是通过D0~D7这八根数据线并行送出的。  |
|
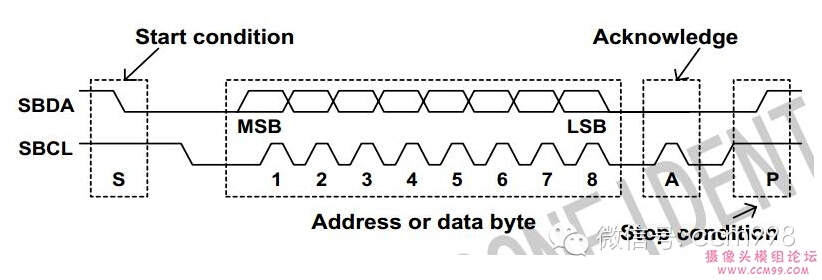
(1)、Pixel Array GT2005阵列大小为 1268 列、1248 行,有效像素为 1616 列, 1216 行。也就是说摄像头为1600X1200的时候,像素点要多于这个,去除边缘一部分,保证图像质量吧。 (2)、IIC 这个不用说了,摄像头寄存器初始化的数据都从这里传输的,所有的IIC器件都一样的工作,来张图吧,后面做详细分析; |
|
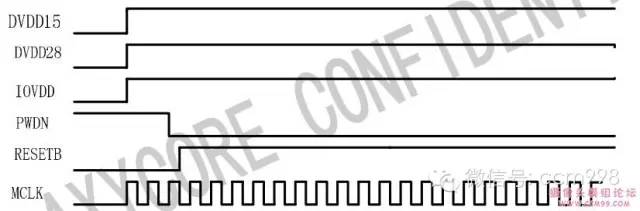
下面这一部分在调试驱动的过程中比较重要了: (3)、MCLK 电子元件工作都得要个时钟吧,摄像头要工作,这个就是我们所要的时钟,在主控制芯片提供,这个时钟一定要有,要不然摄像头不会工作的。 (4)、上下电时序,这个要接规格书上来,注间PWDN、RESETB这两个脚,不同的摄像头不太一样,这个图是上电时序,上电时参考一下,知道在那里看就行; |
|
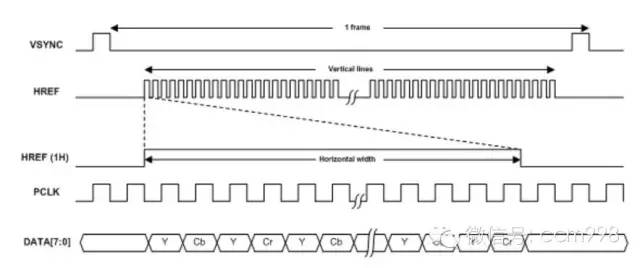
(5)PCLK \D1~D7 摄像头得到的数据要传出来吧,要有数据,当然数据出来要有时钟和同步信号了,看下它的时序,和LCD显示的时序一样,道理是一样的: |
|
(6)、主要的寄存器:分辨率、YUV顺序、X轴、Y轴镜相、翻转 以上工作完成后,也许还有一些问题,分辨率太小; YUV顺序不对图像不对; XY图像方向。这些工作完成后,如果还有什么细节的问题,如果你想花时间,看规格书里面的寄存器可以解决的,如果不想看,找模组厂的FAE,他们专业的,很快会帮你搞定。 (7)、摄像头的硬件接口 |
|
二、S5pv310上Camera主控芯片上的硬件接口 1、CAMIF Camera Interface 先看一下摄像头接口框图:(这个看着有点抽像,我们放这里,先了解一下,其实驱动中一般不会涉及到这里,不过我们这里分析了,就把这个带出来了) |
|
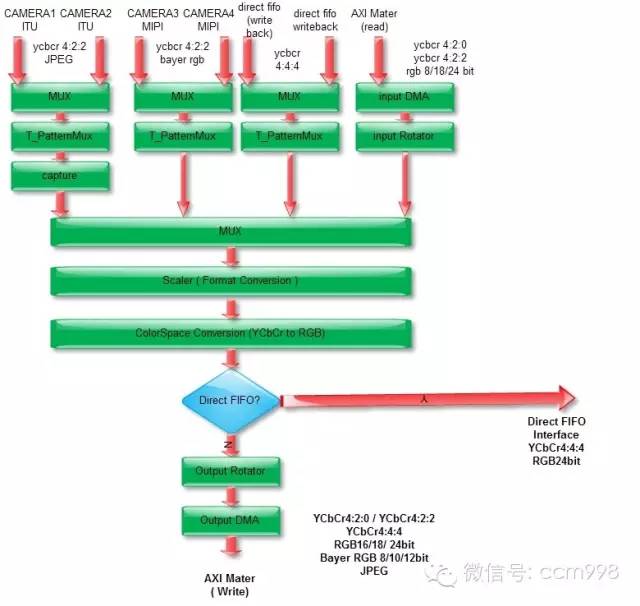
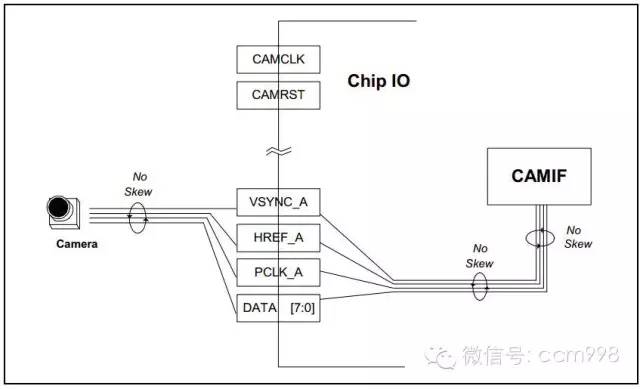
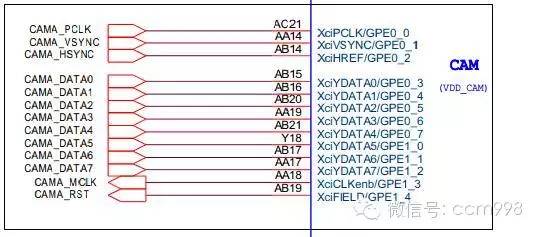
(1)、摄像头接口的主要属性: a、支持多种输入接口:(就是上面我们看到的四模式) DMA (AXI 64-bitinterface) 模式; MIPI (CSI) 模式; ITU-R BT 601/ 656/ 709模式; Direct FIFO (PlayBack)模式; b、支持多种输出模式: DMA (AXI 64-bitinterface) 模式; Direct FIFO 模式; c、支持数码变焦Digital Zoom In (DZI) capability; d、支持多摄像头输入; e、 支持视频同步信号极性可编程控制; f、支持最大输入分辨率为8192X8192; g、支持图像翻转(X轴、Y轴镜相,90、180、270翻转); h、支持多种图片格式; i、支持捕获帧控制; j、支持的图像特效。 2、FIMC Fully InteractiveMobile Camera 摄像头的采集的数据要CPU无法直接处理,主控芯片里面集成了Camera控制器,叫FIMC(FullyInteractive Mobile Camera)。摄像头需要先把图像数据传给控制器,经过控制器处理(裁剪拉升后直接预览或者编码)之后交给CPU处理。实际上摄像头工作需要的时钟(MCLK)也是FIMC给它提供的。 在s5pv310上的摄像头接口是一个FIMC(完全交互式移动相机接口),支持ITUR BT-601-605标准、AMX接口、MIPI接口 MIPI 、ITU、AMX (1)、ITU国际电信联盟无线电通信部门ITU-RRadiocommunication Sector of ITU 简称ITU-RITU-R BT.601 16位数据传输;Y、U、V信号同时传输,是并行数据,行场同步单独输出。 ITU-R BT.6568/10位数据传输;不需要同步信号;串行数据传输;传输速率是601的2倍;先传Y,后传UV。行场同步信号嵌入在数据流中。 (2)、MIPI(移动行业处理器接口)是MobileIndustry Processor Interface的缩写 MIPI 规范:Camera工作组:MIPI Camera Serial Interface 1.0specification .Camera Serial Interface 2 v1.0 (CSI-2) (3)、AMX(Advanced eXtensible Interface)是一种总线协议,该协议是ARM公司提出的AMBA(Advanced Microcontroller BusArchitecture)3.0协议中最重要的部分,是一种面向高性能、高带宽、低延迟的片内总线。 3、接口信息 FIMC信号定义如下所示(YCbCr模式)
通过CAM_MCLK给摄像头提供时钟,RST是复位线,PWDN在摄像头工作时应该始终为低。HREF是行参考信号,PCLK是像素时钟,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,PCLK和VSYNC同步传输数字图像信号。数据是通过DATA0~DATA7这八根数据线并行送出的。 |
|
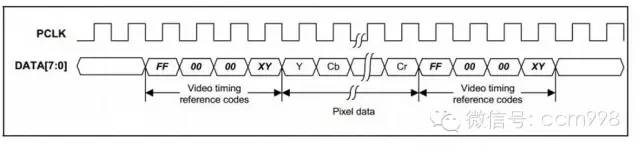
4、不同接口模式的工作时序 ITU-R BT 656输入时序图,这种方式下同步信号已经内嵌到视频数据中了,因此不需要额外的行和帧同步信号。 |
|
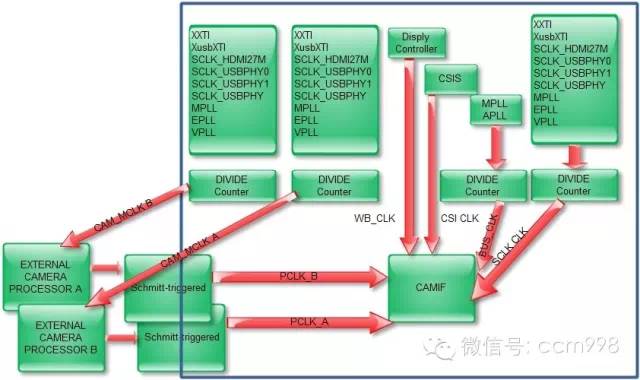
ITU-R BT 601输入时序图,这种方式下行和帧同步信号独立于视频数据,因此需要同步信号。 (ITU-R BT 601: 16位数据传输;21芯;Y、U、V信号同时传输。 ITU-R BT 656: 9芯,不需要同步信号;8位数据传输;串行视频传输;传输速率是601的2倍;先传Y,后传UV。) 同步信号的时延参数 Ø t1:表示VSYNC前、后插入周期 Ø t2:表示HREF前插入周期 Ø t3:表示 HREF宽度 Ø t4:表示HREF后插入周期 5、camera的时钟域,三个时钟:系统时钟、PCLK、MCLK 每个摄像头接口包括三个时钟域,每一个时钟域是系统总线时钟,第二个是摄像头像素时钟PCLK,第三个时钟域为内部时钟MCLK。系统总线时钟必需高于PCLK, CAM_MCLK 必需固定频率分频,如PLL时钟。如果有外部时钟晶振,CAM_MCLK 空掉。不需要同步MMCLK,PCLK应该与schmitt-triggered电平移位器连接。 |
|
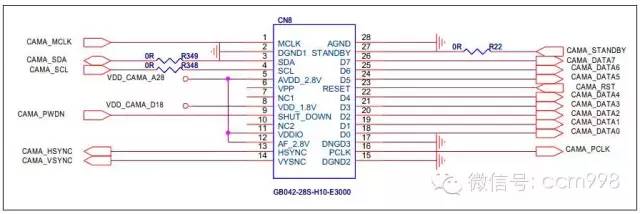
6、硬件接口电路 主控芯片上的接口: |
| camera 接口 |
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
摄像头及红外成像的基本工作原理2024-11-25 4353
-
摄像头工作原理2023-10-20 748
-
学技术 | 摄像头的工作原理2022-11-10 13638
-
Camera摄像头工作原理是什么?2021-09-27 1534
-
车载摄像头的工作原理_车载摄像头怎么使用2020-12-02 16497
-
无线摄像头的工作原理是什么?2019-09-19 3990
-
ISP和摄像头工作原理2019-09-17 11523
-
关于摄像头模组工作原理分析和应用2019-08-26 24222
-
电子设计大赛元器件之摄像头工作原理2016-07-21 7717
-
基于摄像头的目标分析监控系统设计2016-01-04 1916
-
手机camera摄像头工作原理2011-11-30 235871
-
摄像头的工作原理 Product information2009-12-18 26557
-
什么是CCD,ccd摄像头工作原理2009-08-02 7096
全部0条评论

快来发表一下你的评论吧 !
