

关于英飞凌的电机控制方案的分析和介绍
电子说
描述
最近街面上常见平衡车的影子,连小区里的潮大妈都踩上了平衡车去买菜。只靠一两个轮子就能在小巷里闪转腾挪来去自如的平衡车在市场上接受度越来越高,你是否也正在想着进入这一方兴未艾的领域呢?
平衡车原理
平衡车图示
平衡车通过感应身体重心的变化来调整前进方向与速度,身体前倾前进,后倾后退,正常站立则保持不动,倾斜角度越大车速越快,达到使重心保持平衡的效果。
但具体从电路上这种神奇的“不倒翁”装置是如何实现的呢?原来平衡车利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。
平衡车电路由三部分构成
一是陀螺仪或加速度传感器
二是微处理器或控制器
三是电机驱动
这三部分共同协作,形成了一个根据反馈控制电机的闭环系统。
电机控制的重要性
一般平衡车都会看重传感器的作用,不过假如忽视了电机控制系统,犹如瘸子走路,一脚高一脚低,平衡倒是平衡了,但摇摇晃晃不仅跑不快,还容易出安全事故。
安全问题是不可忽视的!上述电路设计的三部分固然重要,而为了安全考虑,控制器和电机驱动的重要性反倒更胜一筹。而英飞凌的平衡车方案,上能Hold住高精度陀螺仪,下有可靠性极高的MOSFET助阵,可说是平衡车的高性价比选择。
本次推荐的方案采用XMC1302作为主控芯片,正弦波驱动,噪音低。配合先进的算法实现自平衡控制。两块控制板的软硬件完全一致,分别控制左右电机,方便生产,性价比高。
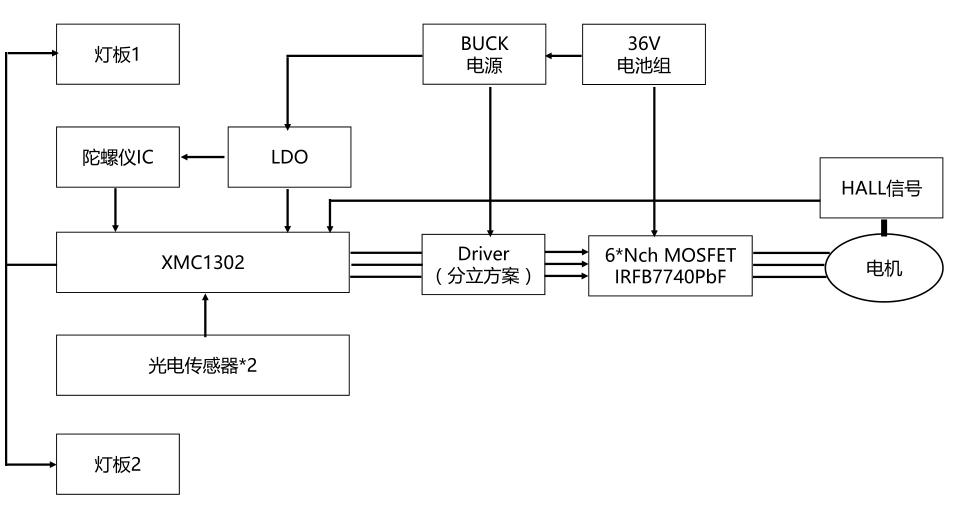
方案框图
方案实物图
性能指标细节奉上:
| 参数 | 指标 |
| 电池组参数 | 36V/4.4AH |
| 电机功率 | 300W+300W |
| 最高速度 | 12公里/小时(限速) |
| 续航里程 | 20-30公里(视骑行者体重及路况而定) |
| 最小转弯半径 | 原地转弯 |
| 最大爬坡角度 | 18度 |
| 车体姿态传感器 | 双陀螺仪 |
| 调制频率 | 16KHz |
| 保护功能 | 过流、欠压、堵转、缺相保护等 |
| 使用温度 | -15℃ - +50 ℃ |
除了主控制器,该方案还采用了IRFB7740PbF与IRFU9024NPbF作为主控功率器件共同实现方案功能。
-
电机控制方案的分析与选择2021-08-27 1226
-
关于新能源汽车电机控制器的性能分析和应用介绍2019-09-24 15718
-
大联大品佳力推英飞凌智能车用电机驱动和电机控制解决方案2018-12-12 3730
-
基于英飞凌Tc1797芯片的电机控制系统设计2018-12-06 5107
-
基于英飞凌产品的汽车EPS方案介绍2018-12-05 4295
-
关于恩智浦的整体电机控制解决方案的介绍(二)2018-06-28 4418
-
Microchip电机控制解决方案介绍2018-06-01 5556
-
英飞凌PMSM电机控制系统的解决方案2017-01-20 17622
-
电机控制方案选集2016-05-19 833
-
英飞凌TLE987x车载电机驱动与控制解决方案2016-02-23 12036
-
大家有人使用过英飞凌的芯片做电机控制的吗2015-04-26 5918
-
英飞凌:汽车电动助力转向系统的解决方案和产品技术2013-01-28 22087
-
英飞凌汽车车体系统座椅控制设计方案2010-04-09 1563
全部0条评论

快来发表一下你的评论吧 !
