

关于GPT12正交编码器输入译码开发案例的分析和介绍
电子说
1.4w人已加入
描述
案例内容概览
1.1 功能开发需求
1.2 高精度编码器输入信号
1.3 GPT12解码原理
1.4 MCU引脚资源分配
1.5 GPT12时钟源
1.6 GPT12的Port配置
1.7 GPT12的增量接口配置
1.8 代码实现
1.9 问题与解决
1.10 附录-增量编码输入示波器波形
(1)正转
(2)正转清零
(3)反转
1.1 功能开发需求
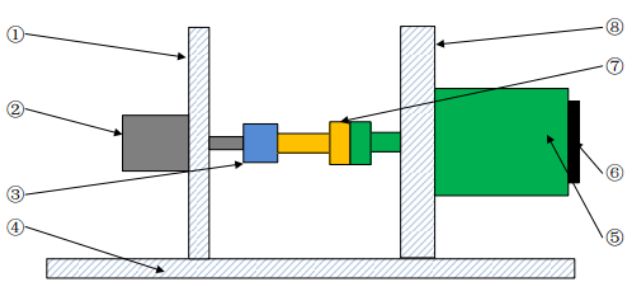
在某款汽车电子产品的电机转子位置RPS传感器的精度性能评价测试中,需采用高精度编码器对电机转子位置进行同轴同步高精度采集,以实现对标电机端RPS传感器是否合格。此图为性能评价测试工装示意图。
工装图注说明:
①编码器工装;②高精度编码器;③刚性联轴器;④工装底座面板;
⑤电机本体;⑥电机位置RPS传感器;⑦爪型联轴器;⑧电机工装侧板。
开发需求:
电机的⑥处位置&角速度传感器的精度需要根据同轴的外部②处的正交编码器进行校准,因此我们需要将ECU捕获到②和⑥的信号进行对比一致性,开发MCU程序实现:由GPT12直接捕获正交编码器A、B、Z三路信号直接结算的模块和功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
GPT EVAL_BDPS_DRIVER可以使用GPT12 IP或GTM IP来实现连续定时器和单次定时器吗?2024-01-22 1196
-
请问TC234芯片中的CCU6 , GTM, GPT12中的pwm区别是什么?2024-02-05 1054
-
RVMCU课堂「17」: 手把手教你玩转RVSTAR—正交编码器接口篇2025-10-31 98
-
正交编码器接口2013-06-04 1778
-
stm32正交编码器2014-03-26 14594
-
STM对正交编码器测速的程序--输入捕获测速2017-08-03 14369
-
STM32正交编码器怎么进行测速?2021-11-16 1791
-
正交编码器原理什么是正交?2022-01-10 2647
-
PIC正交编码器QEI2022-05-23 10993
-
定时器的正交译码器功能介绍2023-08-16 888
-
编码器与译码器2007-12-20 774
-
编码器正交编码工作原理2018-08-02 33545
-
STM32的正交编码器模式读取编码器的角度数据和速度2021-12-08 2923
-
如何使用SPI总线设计正交编码器计数器2022-04-27 5605
-
编码器与正交译码器2022-02-25 1552
全部0条评论

快来发表一下你的评论吧 !
