

怎样用PWM控制步进电机
电子说
描述
步骤1:接线和连接
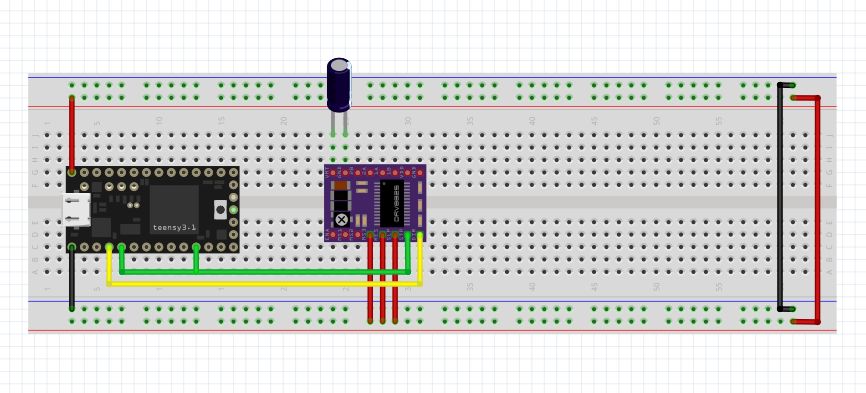
首先将焊头连接到DRV8825板和Teensy,然后将它们放在面包板上。 (实际上最容易焊接这些标题,而电路板已 在面包板上,但按您喜欢的顺序工作!)
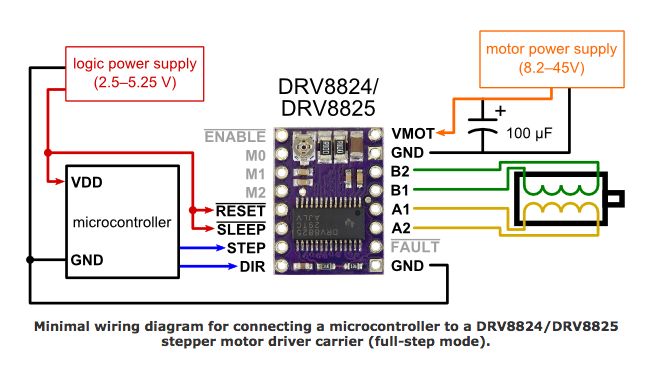
我们将连接步进驱动器,就像Pololu产品页面中的图表一样(也包含在下图中)。
VMOT 和 GND 之间将有一个100uF电容,并连接到能够提供至少2A的12V台式电源。
将 ~RESET 和 ~SLEEP 引脚连接到teensy的5V电压轨保持高电平。
步进器本身将连接到 A1,A2,B1 和 B2。
将步进器设置为1/16步通过将 M2 拉高并允许 M0 和 M1 浮动来实现模式。
驱动程序的 GND 引脚将连接到teensy GND。
teensy的引脚2将连接到驱动程序的 DIR 引脚。
并且teensy的引脚3将连接到驱动程序的 STEP 引脚。
teensy将有一个额外的连接:引脚9将是连接到引脚3.这将允许teensy通过引脚更改中断计数脉冲。
还要确保将DRV8825的限流电阻设置为适当的值,如产品页面所述。
第2步:编码!
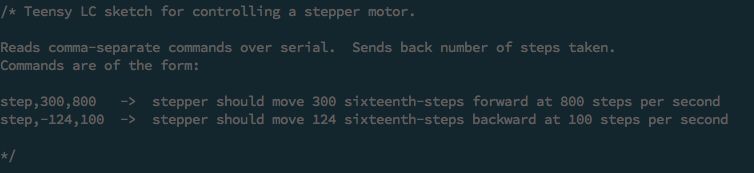
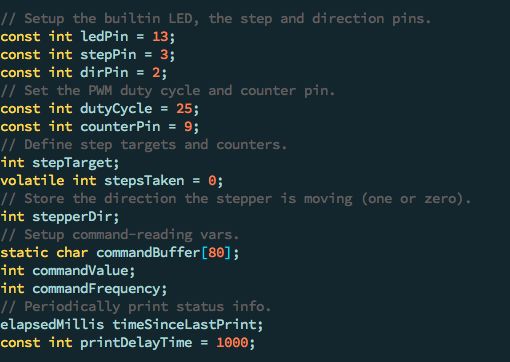
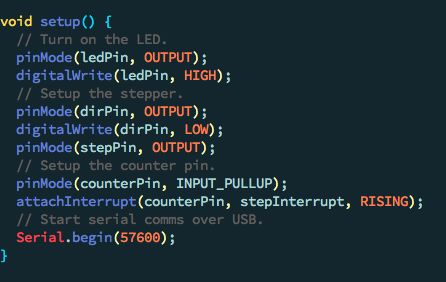
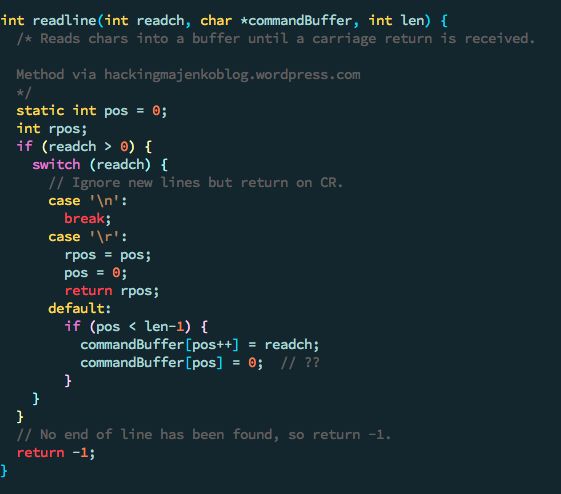

我用teensyduino写了一个类似arduino的草图来控制步进电机。按照此处的teensyduino设置步骤正确设置编码环境。
该代码允许我们从终端发送命令来控制步进器的位置。完整的草图发布在这里。下面的每张图片都会细分代码的一部分。还有一个控制器正在运行的快速演示!
第3步:接下来是什么。.
接下来可以尝试的一些事情:
添加限位开关以控制步进器行程的最大和最小范围
使用加速实验以快速加速步进
尝试不同的微步进值 - DRV8825支持完整步长至1/32微步
-
怎样用好手中的六位半万用表?2023-03-07 4366
-
用PLC实现步进电机的直接控制2022-10-26 9661
-
用PWM实现仪表步进电机的微步细分驱动2021-12-06 1813
-
怎样用STM32F103去输出一路PWM波形呢2021-11-15 1980
-
怎样用MCU来生成PWM2021-11-03 1793
-
怎样用倒顺开关去控制单相电机的正反转呢2021-10-18 6880
-
如何去实现两个步进电机独立控制互不干扰呢2021-10-15 3427
-
怎样用STM32F407VET6单片机去控制无刷电机呢2021-09-18 2668
-
怎样用STM32F103控制步进电机?2021-07-08 942
-
介绍怎样用MCU来生成PWM资料下载2021-04-25 1043
-
怎样用mosfet管设计步进电机的驱动电路呀?大神请看过来2014-11-04 8312
-
怎样用FPGA控制舵机2013-10-20 3997
-
用GPIO做步进电机控制2009-09-19 1287
全部0条评论

快来发表一下你的评论吧 !
