

全3D打印Arduino机器人的制作
电子说
描述
第1步:记下想法
第一步是如何制作这个机器人。构建所需的所有组件是什么?
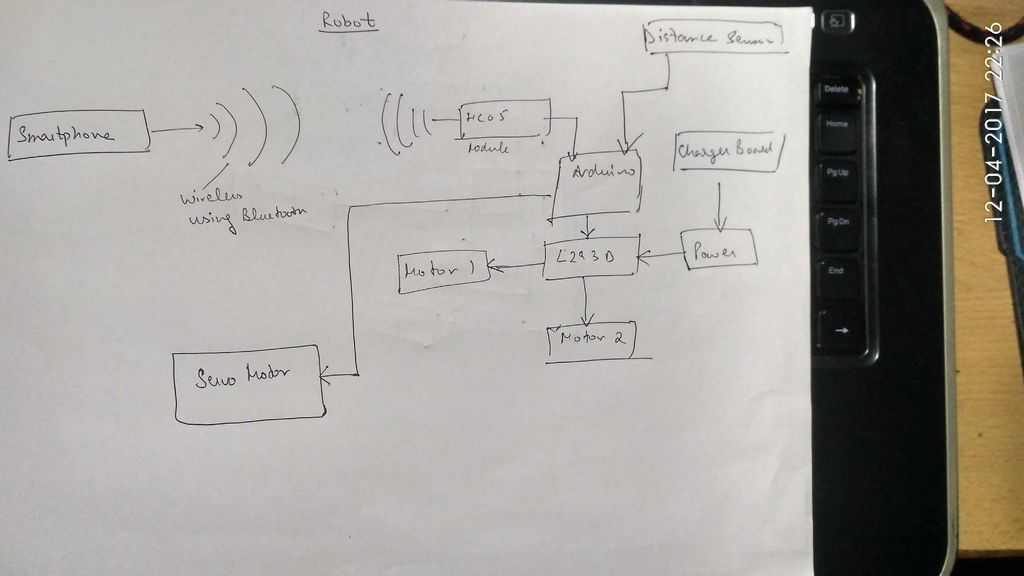
我以流程图的形式在一张纸上设计了粗略的想法。
我决定了我需要的所有功能机器人以及未来可以做些什么改进。
我也希望这个机器人能够即插即用,这样孩子们就可以玩它并享受乐趣并了解它
因为它是用arduino制作的。它非常容易理解。
这个机器人也是完全封闭的,所以非常安全。
所以这一切都记在我脑海里我写了的想法
我已附上图片,以便您更好地了解这个项目。
第2步:收集您的组件
以下是必需组件: -
Arduino Pro mini - 5v/16 MHz - (x1)
HC - 05蓝牙模块 - (x1)
18650锂离子电池 - (x1)
BO直流减速电机300转 - (x2)
2个车轮或轮胎 - (x2)
DPDT翘板开关 - (x1)
SX1308升压模块 - (x1)
TP4056充电模块 - (x1)
6 mm香蕉插座母 - (x2)
接线端子 - (x3)
Berg带公母 - (x1)
Sg90伺服电机 - (x1)
Led - (x5)
1K电阻 - (x3)
10K电阻 - (x5)
L293d电机驱动器IC - (x1)
跳线
带状电线
HC-SR04距离传感器模块 - (x1)
3 X 2 PCB Veroboard - (x1)
第3步:所需工具
以下是构建所需的工具: -
M4内六角螺栓 - (x4)
M3内六角螺栓和螺母 - (x10)
万用表
文件
剪线钳
剥线器
烙铁
焊料
部分螺丝
FTDI模块
Castor Wheel
螺丝刀
Allen Key
3D打印机
3D打印细丝
步骤4:需要软件和应用程序
以下是所需软件: -
Fusion 360
Arduino IDE
Fritzing
蓝牙电子应用程序通过Keuwl soft
Simplify3D或任何其他切片软件
Android应用的链接位于以下位置: - https://play.google.com/store/apps/details?id = com 。..。
步骤5:电路
我设计了电路,因为软件可以免费使用,非常容易为初学者使用
这个版本的不错的功能。
我附上了fritzing文件。
如你所知,有些部件缺失了,所以我手工绘制纸张上不同部分的布线。
确定你仔细检查原理图。
这里是附加的原理图文件:
步骤6:电路的工作
电路的工作非常简单但非常有趣和直观。所以这是它的工作原理: -
机器人的大脑是arduino pro mini。机器人通过蓝牙模块进行无线通信。
蓝牙模块与智能手机配对,并使用蓝牙将数据传输给机器人。
Arduino然后处理数据,然后转动电机如代码所述开启或关闭。
对于电源,我使用了两个并联的锂离子电池,因此产生了3.7v 4400 mah的光源。
使用了Sx1308 Boost模块将电压从3.7增加到7v。然后,这个升压电压传递到Arduino的原始引脚,然后为arduino板,伺服电机,距离传感器和蓝牙模块供电。
对于电池充电,我使用TP4056充电器模块为这些电池充电从大约5小时完全耗尽到完全充电!!!!
TP4056模块可以通过智能手机充电器或香蕉母端子供电。
用于驱动电机I使用L293D H桥式电机驱动器IC。这是因为arduino无法处理电机运行所需的电流。
对于自动移动,机器人使用距离传感器模块。当在应用程序中激活按钮时,机器人以自主模式转动然后行进,如果它找到障碍物而不是停止并左右转动头部,然后决定应该在哪里继续。
第7步:设计机器人
为了设计机器人,我使用了Fusion 360软件,因为它是免费使用的,并且非常用户友好。
首先,我大致了解每个部件的尺寸和位置。
然后我开始对其车身进行建模,车身有一个顶部关闭盖子和一个底部底盘作为主要部件。
为了使整个建模易于理解,我还在Fusion 360中制作了一个动画视频,展示了整个机器人的组装方式。
我制作的锂离子电池座用于将电池固定到使用M3螺栓和螺母的底盘。
还为距离传感器安装了一个安装支架,将其安装在伺服电机上。
我还对组件进行了三维建模,以便我可以组装它们并看到它们正在按预期工作。
我已经附加了融合设计,因此您也可以根据需要进行编辑和使用。
步骤8:3D打印
为了切片Stl文件我使用的是simplify3D,但你可以使用任何其他与你的3D打印机兼容的切片软件。
我有一个超级便宜的Anet A8 3d打印机,我使用了e sun Pla +我已经附加了所有3d打印模型的stl文件。
以下是我的打印机上的打印设置: -
填充= 30%
图层高度= 0.2 mm
打印速度= 60 m/s
并且底盘部件印有支架。
步骤9:汇编
组装电路: -
按照原理图收集所有组件并开始组装电路。
将输出电压从Sx 1308调整为7 v
然后将它连接到电路板上的两个电源输入端子。
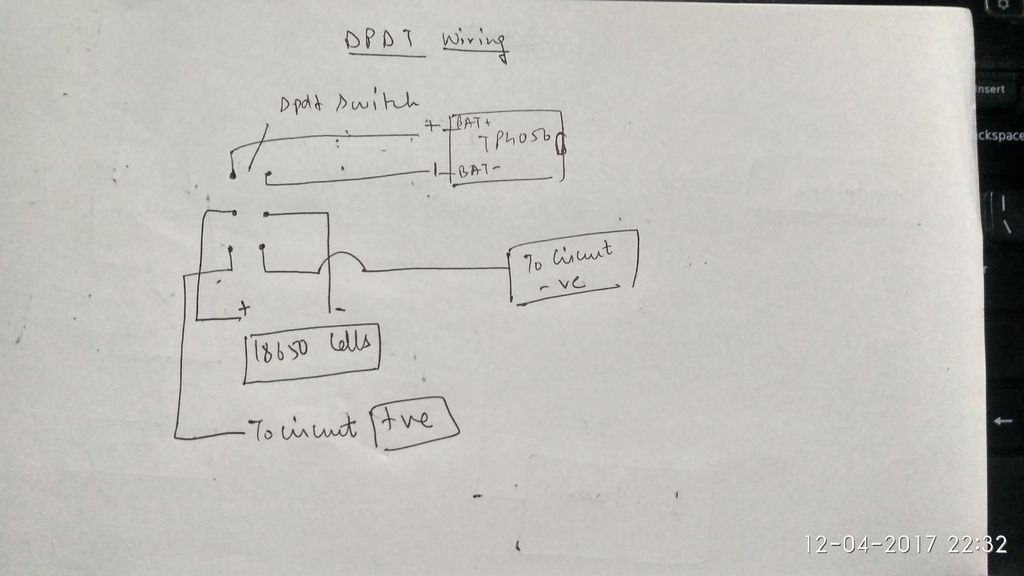
将电路组装在3×2 PCB上通过DPDT开关将电线焊接到TP4056模块上。
我已连接DPDT开关接线供您参考。
给机器人充电向一个方向轻拂开关,然后让机器人向相反方向轻弹开关。
装配机器人: -
首先从3D中取出3D打印部件打印机床。
首先添加电池,然后使用两个内六角螺栓和螺母将电池座部件固定好。
然后使用适当的M3螺栓将直流电机连接到机箱上。然后将轮胎添加到电机轴上。
然后使用三个M3螺栓和螺母添加脚轮,然后添加电路并用螺母和螺栓固定。
顶盖将伺服电机添加到切口中,然后将超声波距离传感器安装到其上。
然后添加开关和其他部分并完成硬件构建。
步骤10:编程机器人
打开arduino IDE软件然后使用我的草图并使用FTDI分线板编程arduino pro mini。
确保在将代码上传到arduino时断开蓝牙模块,因为arduino无法同时与PC和蓝牙模块通信。
上传代码后重新连接蓝牙模块。
这是arduino草图: -
步骤11:应用程序
我使用的应用程序是由Keuwl soft开发的蓝牙电子产品。
这个应用程序是高度可定制的,非常容易使用。
为了与蓝牙模块进行通信,我们必须进行一些更改。
我附上了一系列可以复制设置的照片。
第12步:结束
所以你有它你有你自己的3D打印Arduino机器人
我附上的代码是一个基本的代码和可能会被修改。
你可能想知道为什么机器人前面有一个洞。
那个空间用于添加某种显示器以便我可以给我的机器人一些表达。
-
物联网、AR、3D打印、机器人未来将改变我们的生活?2017-10-19 3042
-
基于Arduino的3D打印2轮机器人2022-08-12 4079
-
基于3D打印技术的跳舞机器人的硬件电路制作2018-03-27 5303
-
3D打印构建“折纸”机器人抓手2019-03-20 6141
-
3D打印软体机器人助力3D打印技术发展2019-06-20 3952
-
美大学3D打印软件机器人 不到两小时即完成组装2020-06-13 3928
-
越来越多的机器人开始使用3D打印技术2020-12-07 3010
-
AR.LO Arduino 3D打印机器人2022-07-27 1079
-
Tito之Arduino UNO 3D打印机器人2022-10-20 1952
-
Buddy:3D打印的Arduino社交机器人2022-11-01 1887
-
用3D打印机和4足蜘蛛机器人制作伺服电机2022-12-09 1124
-
如何制作3D打印的Arduino时钟2023-06-26 887
-
带有Arduino、乐高和3D打印部件的DIY双足机器人2023-06-27 1881
-
如何制作3D机器人眼睛2023-07-05 1053
-
Otto DIY Arduino蓝牙机器人易于3D打印2023-07-06 1068
全部0条评论

快来发表一下你的评论吧 !
