

怎样通过耳机插孔控制多达两个伺服系统
电子说
1.3w人已加入
描述
第1步:零件清单
零件
旧(最好是破碎的)Heaphones
电线
伺服(我正在使用HXT900)
9v电池
带耳机插孔的电脑
工具
烙铁和焊料
侧切刀或剥线钳
砂纸
第2步:剪切和剥离耳机
首先切断耳机。只需要耳机插孔。
剥去一英寸的电线外壳。
第3步:分析内部电线
将有三个或套管内的四根电线。
我们关心的唯一电线是纯红色和地线。随意剪掉任何其他电线。
两根电线都用乙烯基绝缘。用砂纸去除乙烯基。打磨电线,直到看到铜色。
第4步:焊接电线
焊接22规格的焊片然后将电线缠绕在电线带上。
步骤5:连接系统
如图所示连接伺服。
步骤6:控制伺服
将伺服器插入计算机的耳机插孔并运行上述.wav文件。
伺服器应顺时针,逆时针旋转,然后停止。
步骤7:制作你自己的Wav文件(可选)


你可能想让你的拥有自己的wav文件。这可以通过大胆轻松完成。
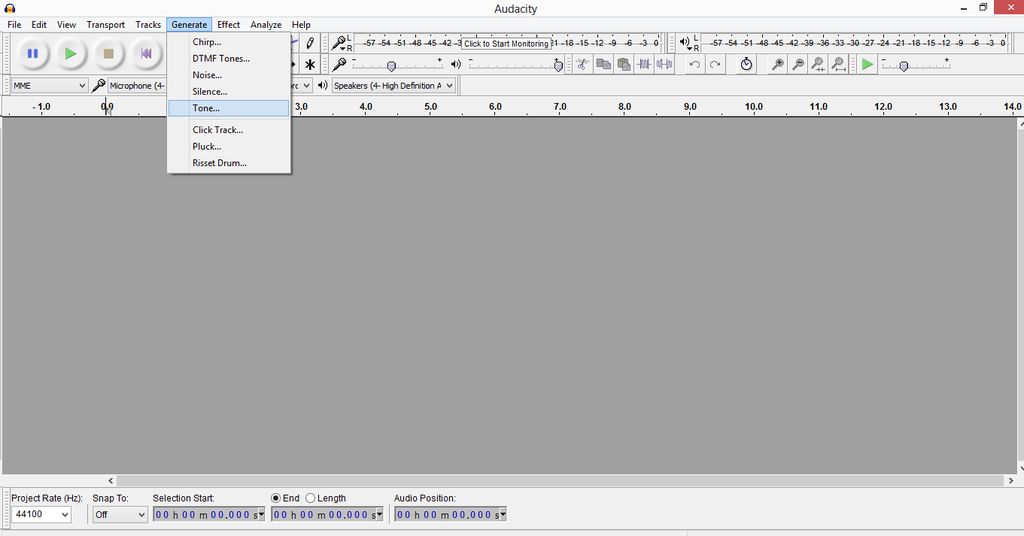
Audacity是一个软件,可以让你制作自定义的wav文件:http://audacityteam.org/。
要使wav文件运行Audacity,然后单击》 Generate》 Tone。
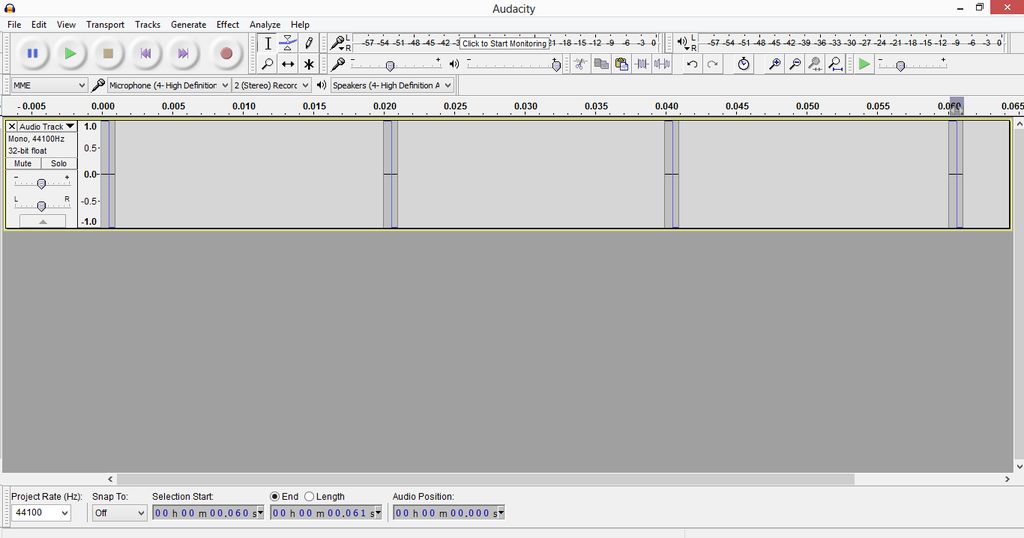
音调发生器会弹出。选择Waveform: Square 和Amplitude: 1。 波的频率控制伺服的速度和方向。
arduino预计每20毫秒发一次脉冲。 1ms和2ms脉冲分别导致完全权利和左翼。
步骤8:未来
这个系统可以很容易地用耳机插孔转动任何东西进入一个机器人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 伺服
-
双插孔耳机电路2015-05-06 0
-
伺服系统的发展趋势是怎样的?2021-09-30 0
-
伺服系统的PID控制2010-05-04 684
-
伺服系统介绍2011-07-10 2546
-
伺服系统脉冲控制电路2011-11-03 3625
-
伺服系统的PID控制技术下载2015-12-09 724
-
交流永磁伺服系统的控制策略2016-04-26 611
-
怎样通过PLC来控制伺服系统2023-02-13 7640
-
交流伺服系统的分类及应用场合2023-03-07 1565
-
伺服系统原理及分类2023-08-27 3122
-
伺服系统基本概念和与变频的关系2024-08-27 440
全部0条评论

快来发表一下你的评论吧 !
