

自动眼镜擦拭器的制作
电子说
描述
第1步:你需要什么
这是项目期间您需要的所有内容:
- 1x Arduino genuino uno
- arduino.exe程序
- 2x伺服电机(我使用TG9e,你可以使用其他更大的或连续的,但我的代码中没有涉及这些)
- 8x pinwires(但可能更多,电线很脆弱!)(推荐不同尺寸)
- usb 2.0电缆
- powerbank
- printboard
- 潜水眼镜(为了更好看,你可以使用普通眼镜,但是潜水眼镜对于伺服系统更稳定)
- 纺织品或布料(你可以使用不同的颜色和擦拭巾,你可以使用橡胶)
- 吸管
- 帽子(这可以是一切或者使用大量电线,这样arduino就可以放在口袋里了!)
- 泡沫塑料
- 烙铁
- 2x十字螺丝
- 十字螺丝刀
- 接触胶
- 剪刀
- 订书机
- 针和线
- 剪线器
- woodfile
第2步:下载Arduino.exe
在计算机上下载arduino.exe时,可以在保存它的文件中打开它,然后进入以下屏幕。
删除激动码并复制以下代码:代码包括一些解释它的功能,如果它不起作用点击我的代码添加的文件。
//确保可以使用伺服功能并将其导入项目中。
#include
//用于区分不同伺服系统的变量。
伺服伺服;
伺服伺服2;
//确定哪个伺服器连接到哪个引脚,以及它们是否以值开始。在这种情况下它是0.
void setup(){
Serial.begin(9600);
servo.attach(8);
servo2.attach(9);
servo.write(0);
servo2.write(0);
}
void loop(){
//转动伺服系统的常数变量并将它们置于其范围内的位置(臂的位置)到达)。
const int angleIncrement = 1;
const int incrementDelay = 10;
//角度从零开始。如果角度小于运动,伺服将转动,因为将angleIncrement加起来有一个小的延迟(incrementdelay)。
for(int angle = 0; angle 《60; angle + = angleIncrement)
{//慢向前移动
servo.write(angle);
servo2.write(角度);
延迟(incrementDelay);
}
//角度从60度开始。如果角度大于零,则角度将向后移动,因为减去angleIncrement的延迟较小(incrementdelay)
(int angle = 60; angle》 0; angle - = angleIncrement)
{//向后缓慢移动
servo.write(angle);
servo2.write(角度);
延迟(incrementDelay);
}
}
第3步:构建电路
好了,现在代码已经可以使用了,你可以用左上角的复选标记保存它,然后用它旁边的箭头按钮将它上传到你的arduino。
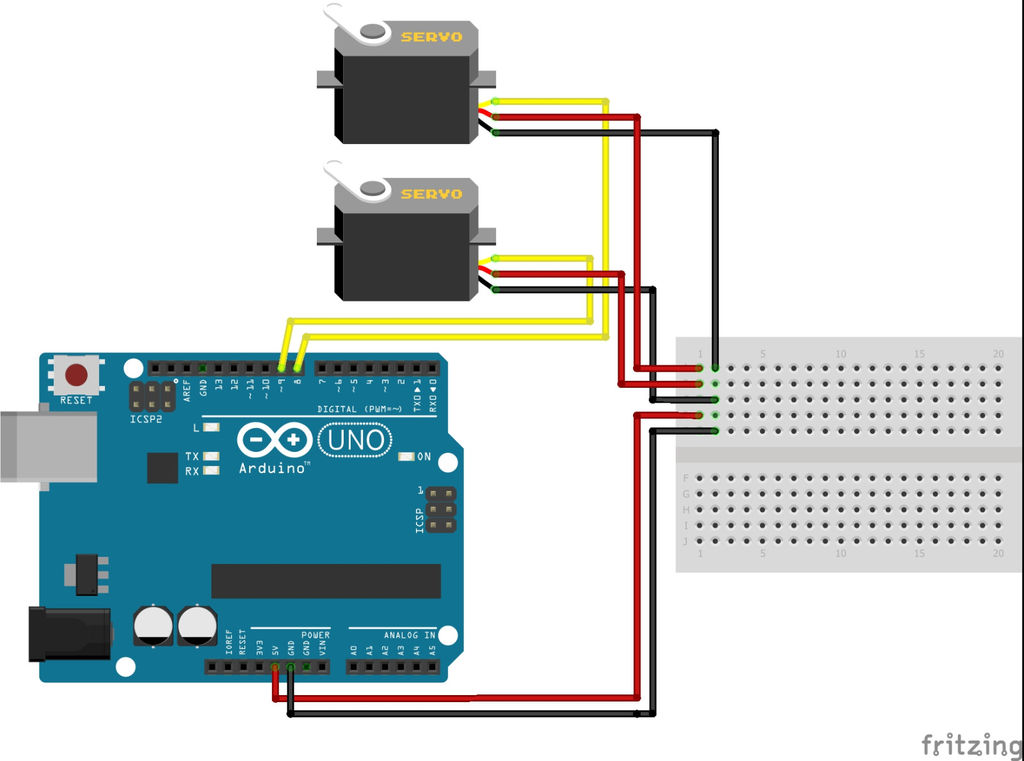
接下来我们将制作电路。看看我的原理图来构建它。剩下要做的就是将USB2.0线缆放入arduino和笔记本电脑,移动电源或使用电池(与arduino上的另一个端口)。
为了解决技术问题,请使用烙铁和印刷板将它们焊接在一起。
现在项目正常运作!现在我们需要进行设计。
第4步:设计潜水眼镜
好的,为了让你的事情变得更轻松,可以戴上眼镜,在鼻子适合的地方剪一个洞。这样你就可以尝试没有呼吸问题的事情。还要将眼镜和眼镜下方的眼镜边缘平放。通过这种方式,伺服系统可以轻松粘合。例如,我们在这里尝试将其与磁带结合在一起。这也是伺服将被附加的地方。
步骤5:制作湿巾
好的技术问题和一些前期工作,让我们从制作湿巾开始吧。只需剪一些布料并使用订书钉将两端连接在一起。用一些吸管将它固定在伺服电机上并将所有胶水粘在一起,看起来应该像最后一张照片。为两个伺服器执行此操作。
步骤6:到达某处
接下来是接触胶和伺服的。将伺服胶粘在玻璃上,将它们完全正确地放在眼镜上可能会很棘手,因为您需要依赖于代码。这意味着你只需要试试伺服器需要粘合的地方,需要一些试验和错误。
第7步:让它美丽?
好吧!在这一点上,您可以或需要做的就是覆盖电线和伺服电机,使其至少有一点防水。我们用一些布来覆盖电线和泡沫塑料,以覆盖所有技术领域。通过这种方式,您可以将其覆盖在帽子中,并且您的头部也可以保存所有尖锐点。
-
氮化镓激光器芯片能用酒精擦拭吗?2023-11-22 2224
-
为什么要对擦拭材料中液体颗粒进行管控2023-06-09 956
-
制作自动传感器门2023-02-08 466
-
制作googly eyes眼镜2023-02-07 938
-
AR眼镜应用设计有什么挑战?2019-08-08 4450
-
小白一枚,想学习制作一个眼镜式的可穿戴设备,如何起步?有过来人可以指点一下吗?2017-06-15 1879
-
VR眼镜的使用2016-10-19 2772
-
转:了不起的谷歌眼镜源码+制作讲解2016-08-19 7070
-
怎么挑选VR眼镜?各类VR眼镜全面推荐2016-03-03 9148
-
防蓝光眼镜如此风靡 防蓝光眼镜什么品牌好2016-01-08 2395
-
眼镜显示器_眼镜显示器是什么2012-03-09 1901
-
意大利眼镜展/2010年意大利米兰光学眼镜展MIDO2009-06-18 2468
-
家电自动控制器的制作及电路图2009-05-19 474
-
水箱自动上水控制器电路及制作2009-04-14 5553
全部0条评论

快来发表一下你的评论吧 !
