

伺服系统执行元件的种类及其特点
描述
伺服系统的执行元件
1、执行元件的种类及其特点

(1)电气式执行元件
电气执行元件包括直流(DC)伺服电机、交流(AC)伺服电机、步进电机以及电磁铁等,是最常用的执行元件。对伺服电机除了要求运转平稳以外,一般还要求动态性能好,适合于频繁使用,便于维修等。
(2)液压式执行元件
液压式执行元件主要包括往复运动油缸、回转油缸、液压马达等,其中油缸最为常见。在同等输出功率的情况下,液压元件具有重量轻、快速性好等特点。
(3)气压式执行元件
气压式执行元件除了用压缩空气作工作介质外,与液压式执行元件没有区别。气压驱动虽可得到较大的驱动力、行程和速度,但由于空气粘性差,具有可压缩性,故不能在定位精度要求较高的场合使用。
三种类型的区别
种类特点优点缺点
电
气
式 可用商业电源;信号与动力传送方向相同;有交流直流之分;注意使用电压和功率。操作简便;编程容易;能实现定位伺服控制;响应快、易与计算机(CPU)连接;体积小、动力大、无污染。 瞬时输出功率大;过载差;一旦卡死,会引起烧毁事故;受外界噪音影响大。
气
压
式 气体压力源压力5~7×Mpa;要求操作人员技术熟练。气源方便、成本低;无泄露而污染环境;速度快、操作简便。功率小、体积大、难于小型化;动作不平稳、远距离传输困难;噪音大;难于伺服。
液
压
式 液体压力源压力20~80×Mpa;要求操作人员技术熟练。输出功率大,速度快、动作平稳,可实现定位伺服控制;易与计算机(CPU)连接。设备难于小型化;液压源和液压油要求严格;易产生泄露而污染环境。
2、常用的控制用电机
控制用电机是电气伺服控制系统的动力部件。它是将电能转换为机械能的一种能量转换装置。机电一体化产品中常用的控制用电机是指能提供正确运动或较复杂动作的伺服电机。
控制用电机有回转和直线驱动电机,通过电压、电流、频率(包括指令脉冲)等控制,实现定速、变速驱动或反复启动、停止的增量驱动以及复杂的驱动,而驱动精度随驱动对象的不同而不同。
(1)伺服驱动电机一般是指:步进电机(Stepping Motor)、直流伺服电机(DC Servo Motor)、交流伺服电机(AC Servo Motor)

(2)常用伺服控制电动机的控制方式主要有:开环控制、半闭环控制、闭环控制三种。
闭环系统的驱动系统具有位置(或速度)反馈环节;开环系统没有位置与速度反馈环节。
a、开环数控系统
没有位置测量装置,信号流是单向的(数控装置→进给系统),故系统稳定性好。
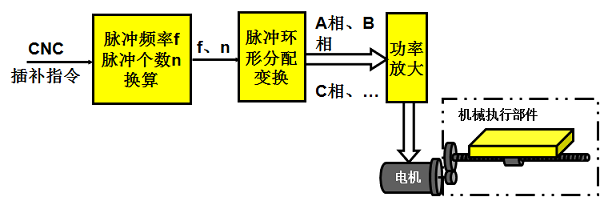
无位置反馈,精度相对闭环系统来讲不高,其精度主要取决于伺服驱动系统和机械传动机构的性能和精度。一般以功率步进电机作为伺服驱动元件。
这类系统具有结构简单、工作稳定、调试方便、维修简单、价格低廉等优点,在精度和速度要求不高、驱动力矩不大的场合得到广泛应用。一般用于经济型数控机床。
b、半闭环数控系统
半闭环数控系统的位置采样点如图所示,是从驱动装置(常用伺服电机)或丝杠引出,采样旋转角度进行检测,不是直接检测运动部件的实际位置。

半闭环环路内不包括或只包括少量机械传动环节,因此可获得稳定的控制性能,其系统的稳定性虽不如开环系统,但比闭环要好。由于丝杠的螺距误差和齿轮间隙引起的运动误差难以消除。因此,其精度较闭环差,较开环好。但可对这类误差进行补偿,因而仍可获得满意的精度。
半闭环数控系统结构简单、调试方便、精度也较高,因而在现代CNC机床中得到了广泛应用。
c、全闭环数控系统
全闭环数控系统的位置采样点如图的虚线所示,直接对运动部件的实际位置进行检测。
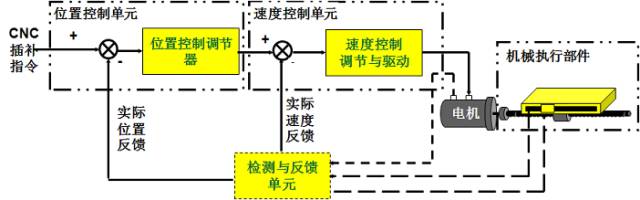
从理论上讲,可以消除整个驱动和传动环节的误差、间隙和失动量。具有很高的位置控制精度。由于位置环内的许多机械传动环节的摩擦特性、刚性和间隙都是非线性的,故很容易造成系统的不稳定,使闭环系统的设计、安装和调试都相当困难。
该系统主要用于精度要求很高的镗铣床、超精车床、超精磨床以及较大型的数控机床等。
机器人的伺服系统
通常情况下,我们所说的机器人伺服系统是指应用于多轴运动控制的精密伺服系统。一个多轴运动控制系统是由高阶运动控制器与低阶伺服驱动器所组成,运动控制器负责运动控制命令译码、各个位置控制轴彼此间的相对运动、加减速轮廓控制等等,其主要作用在于降低整体系统运动控制的路径误差;伺服驱动器负责伺服电机的位置控制,其主要作用在于降低伺服轴的追随误差。
机器人的伺服系统由伺服电机、伺服驱动器、指令机构三大部分构成,伺服电机是执行机构,就是靠它来实现运动的,伺服驱动器是伺服电机的功率电源,指令机构是发脉冲或者给速度用于配合伺服驱动器正常工作的。
机器人对伺服电机的要求比其它两个部分都高。首先要求伺服电机具有快速响应性。电机从获得指令信号到完成指令所要求的工作状态的时间应短。响应指令信号的时间愈短,电伺服系统的灵敏性愈高,快速响应性能愈好,一般是以伺服电机的机电时间常数的大小来说明伺服电机快速响应的性能。其次,伺服电机的起动转矩惯量比要大。在驱动负载的情况下,要求机器人的伺服电机的起动转矩大,转动惯量小。最后,伺服电机要具有控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比。
当然,为了配合机器人的体形,伺服电机必须体积小、质量小、轴向尺寸短。还要经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能在短时间内承受数倍过载。
伺服驱动器是可利用各种电机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构,具有转矩转动惯量比高、无电刷及换向火花等优点,在机器人中应用比较广泛。
伺服系统的发展趋势
随着伺服系统的应用越来越广,用户对伺服驱动技术的要求也越来越高。总的来说,伺服系统的发展趋势可以概括为以下几个方面:
集成化:伺服控制系统的输出器件越来越多地采用开关频率很高的新型功率半导体器件,这种器件将输入隔离、能耗制动、过温、过压、过流保护及故障诊断等功能全部集成于一个不大的模块之中,构成高精度的全闭环调节系统。高度的集成化显著地缩小了整个控制系统的体积。
智能化:伺服系统的智能化表现在以下几个方面:系统的所有运行参数都可以通过人机对话的方式由软件来设置;它们都具有故障自诊断与分析功能;参数自整定的功能等。带有自整定功能的伺服单元可以通过几次试运行,自动将系统的参数整定出来,并自动实现其最优化。
网络化:伺服系统网络化是综合自动化技术发展的必然趋势,是控制技术、计算机技术和通信技术相结合的产物。
简易化:这里所说的“简”不是简单而是精简,是根据用户情况,将用户使用的伺服功能予以强化,使之专而精,而将不使用的一些功能予以精简,从而降低了伺服系统成本,为客户创造更多的收益。
- 相关推荐
- 热点推荐
- 伺服系统
-
开环闭环半闭环伺服系统的区别2024-06-17 5027
-
伺服驱动系统对执行元件的基本要求2024-06-14 1576
-
伺服系统的分类及主要特点2024-06-07 3807
-
交流伺服系统的分类及应用场合2023-11-03 2345
-
液压伺服系统的类型和应用2023-11-01 2563
-
伺服系统原理及分类2023-08-27 4781
-
交流伺服系统的特点有哪些2022-06-02 4818
-
机器人热潮中的伺服系统2018-10-12 2135
-
伺服系统应用于哪儿_伺服系统应用实例2018-05-31 18020
-
伺服系统什么意思_伺服系统的作用是什么2018-04-28 35660
-
伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成2018-03-27 25277
-
伺服系统介绍2011-07-10 3058
-
基于PMSM伺服系统的数学模型及其性能分析2009-07-05 735
全部0条评论

快来发表一下你的评论吧 !
