

简易线跟随机器人的制作
电子说
1.4w人已加入
描述
步骤1:

简单机器人基于LM393双电压比较器
电路的功能是与光敏电阻相匹配,并为LM393芯片提供合适的参考电压。
由于黑白反射率不同,光敏电阻会发生变化。在电路中,分配给不同的电阻电压不同。这个机器人主要用于处理这个小技巧。
步骤2:基于LM393的控制板





led +位置和电阻
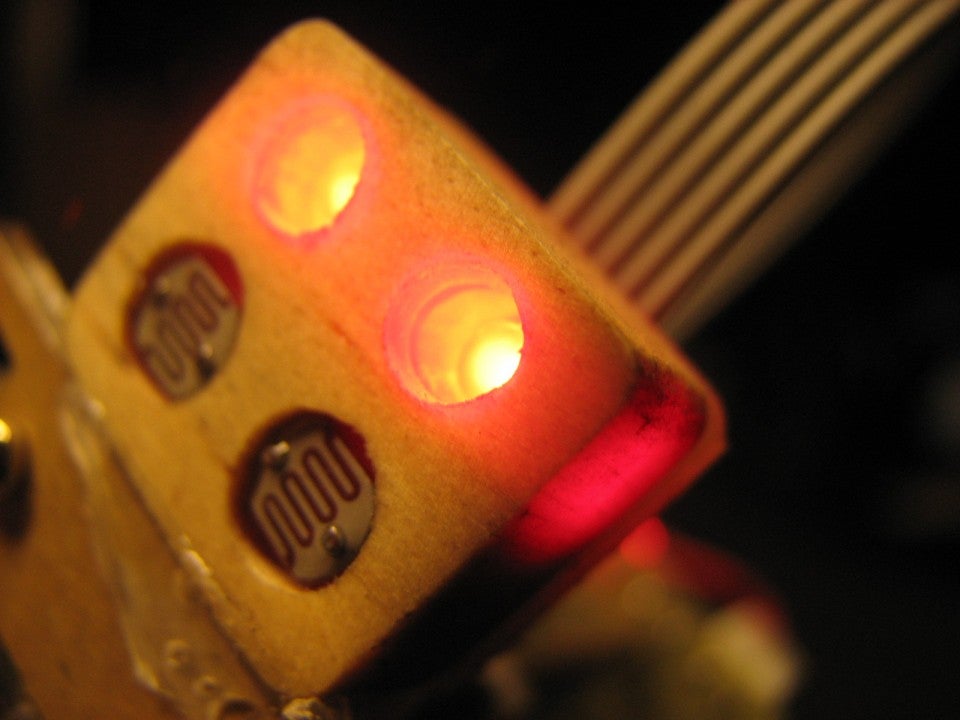
步骤3:传感器板(LED)



LED“+”位于中间,长引脚为“+”
步骤4:传感器板(光敏电阻)





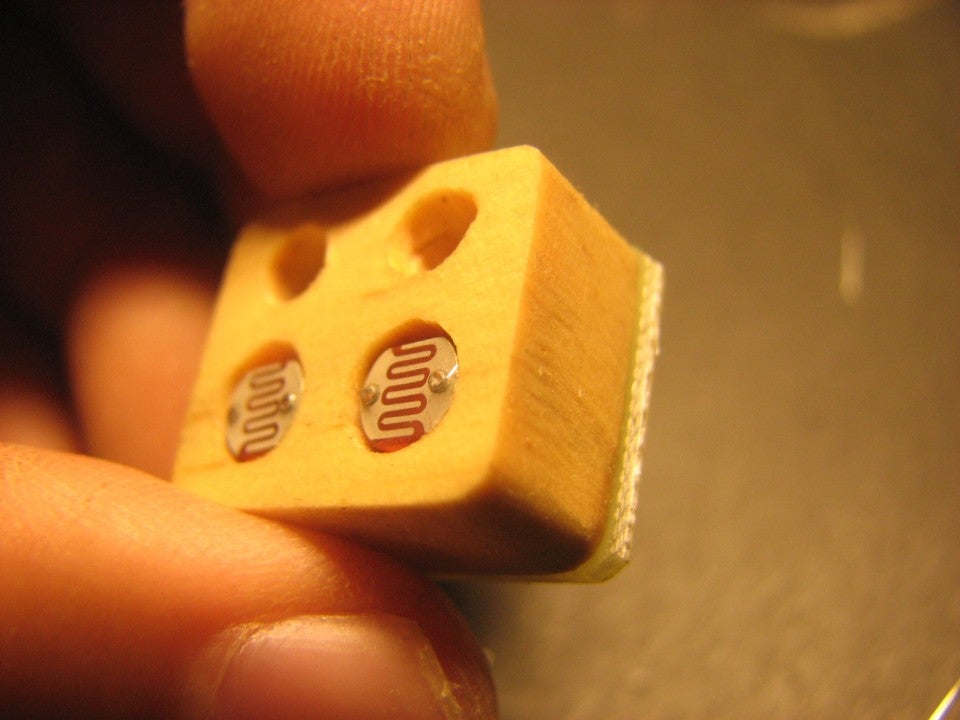

光敏电阻
由于黑色和白色的反射率不同,光敏电阻会发生变化。在电路中,分配给不同的电阻电压
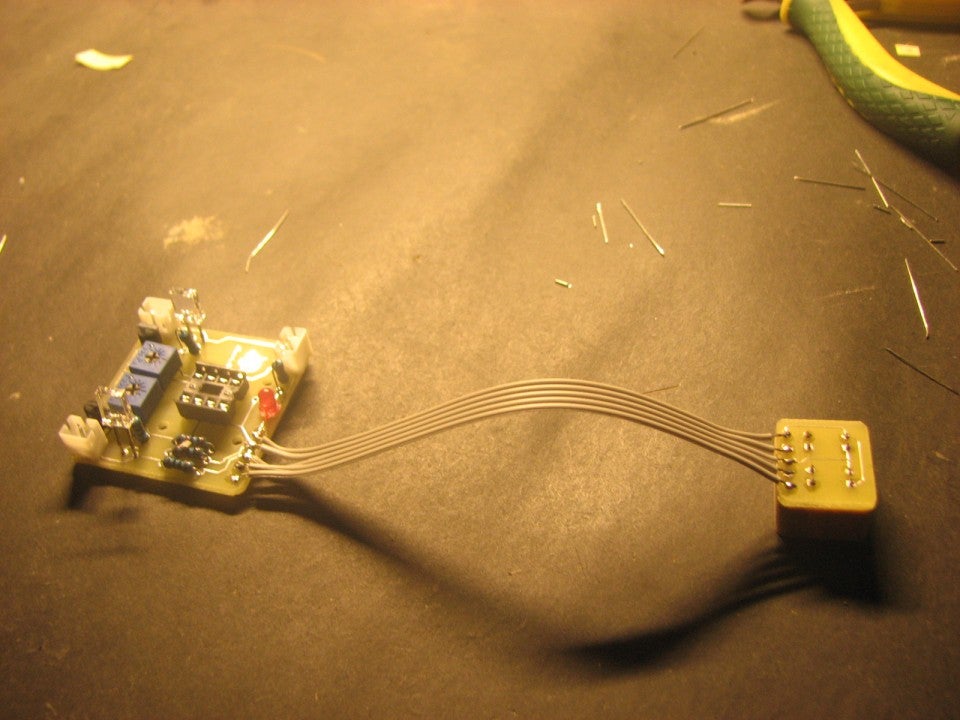
步骤5:连接主板和传感器板




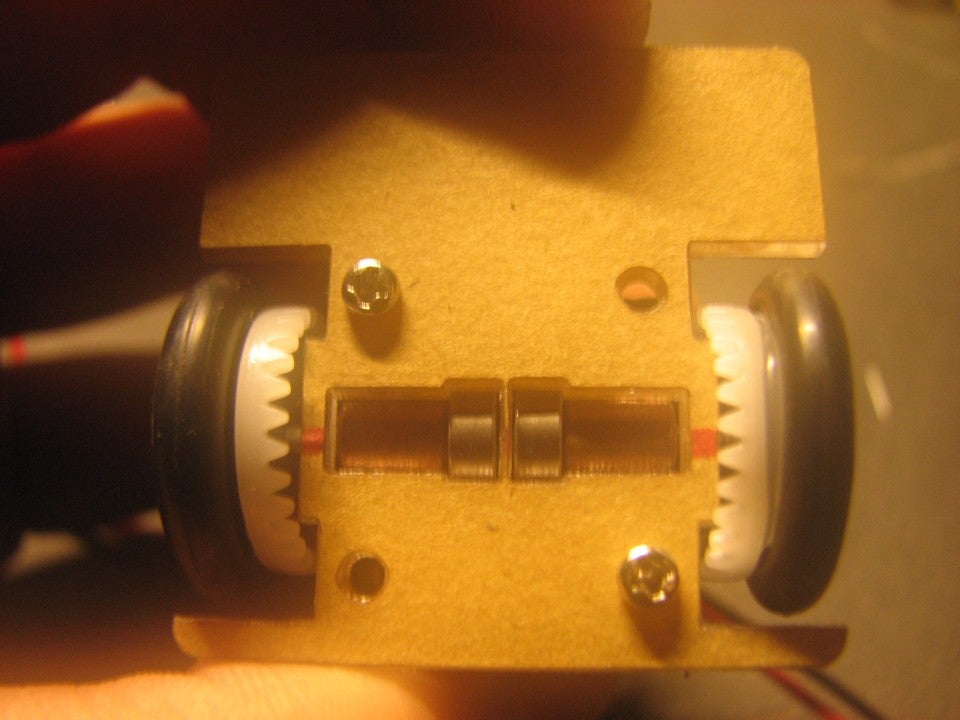
步骤6:两台电机



第7步:电线


红色到‘+’
步骤8:机箱






底部四个螺丝,首先安装在2的对角线上,最后安装剩余的2个
轻轻调整每个螺丝的紧密度以确保底层水平
不能太硬,否则塑料薄膜的底部会被破坏
步骤9:顶部四个螺丝


右上角需要垫一张纸以防止短路
步骤10:电池和充电板


步骤11:迷你车轮

步骤12:通过胶水固定电池和传感器



步骤13:测试




完成所有操作后
画一条粗黑线1.5cm
将机器人置于顶部。
调整2蓝色电位器,可以按照黑线运行机器人
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
DIY简单的线跟随机器人2023-06-14 626
-
基于Arduino Nano的PID线路跟随机器人2022-12-23 1161
-
基于PID的线跟随机器人2022-12-16 665
-
线跟随机器人开源硬件2022-12-15 902
-
使用Pico的线跟随机器人2022-11-15 1041
-
PID控制线跟随机器人2022-11-14 863
-
如何制作Arduino人类跟随机器人2022-11-10 1242
-
最简单的线跟随机器人2022-11-08 613
-
如何使用Arduino制作跟随机器人2022-10-31 1125
-
如何使用AVR单片机构建一个线跟随机器人2022-09-08 1729
-
制作一个带有PID控制器的线跟随机器人2022-08-29 1792
-
线跟随机器人开源项目2022-08-16 688
-
线跟随机器人如何导航?2022-06-22 1023
全部0条评论

快来发表一下你的评论吧 !
