

相机自动抓拍器的制作
电子说
描述
第1步:第一版和所需部件。
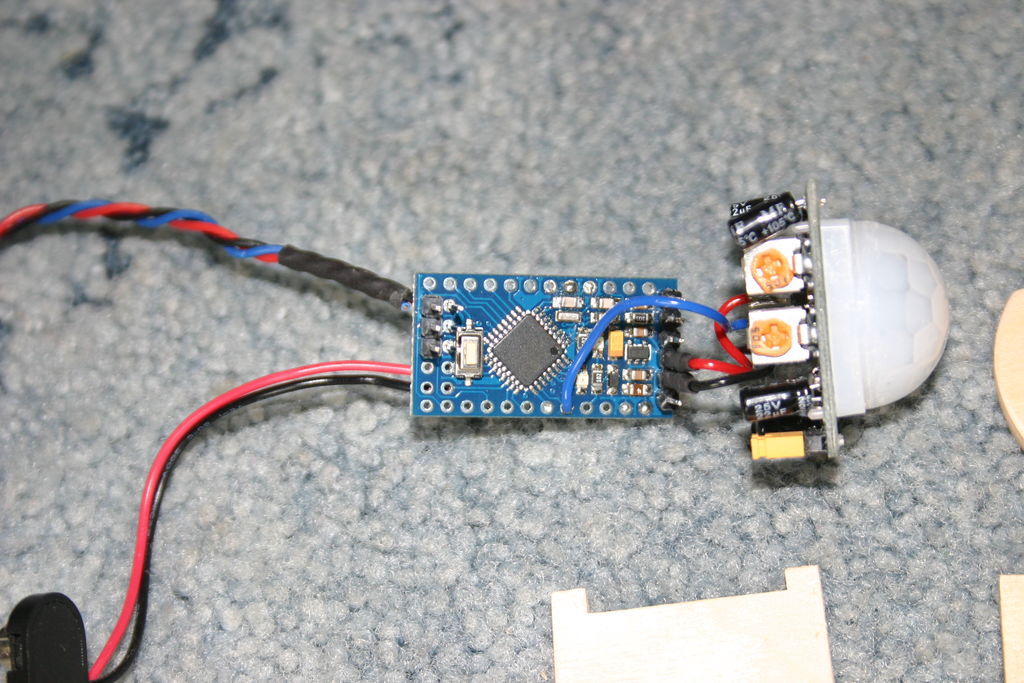
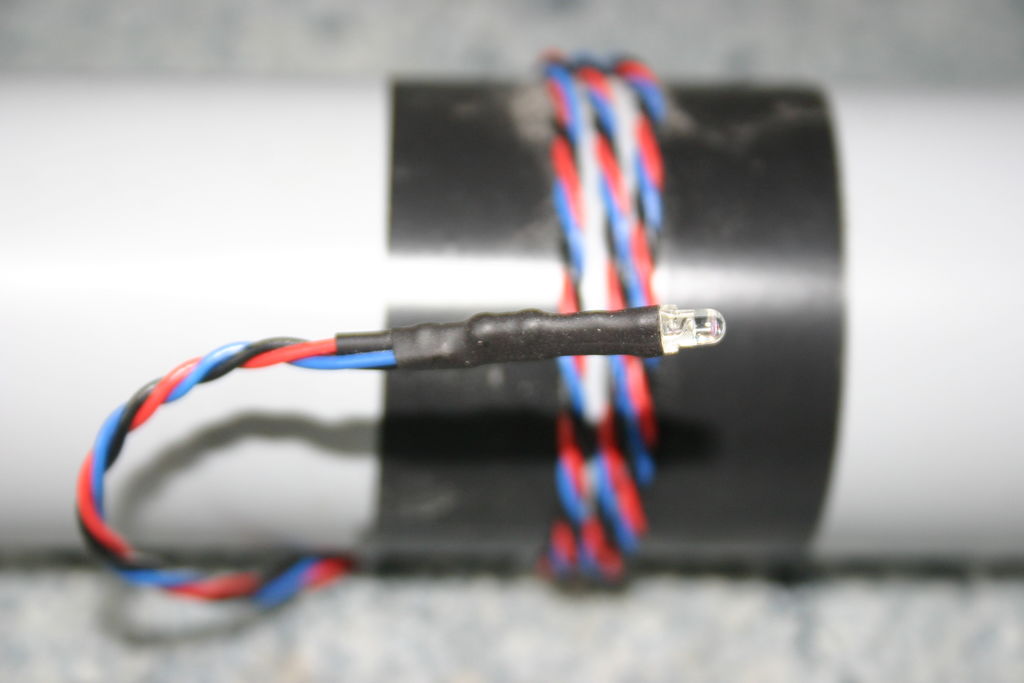
所以第一个版本(它与最终版本相同,但保存方式不同)在长线上有PIR探测器,这使得它可以放置在鸟桌的屋顶下,红外发射器也在长线并朝向相机指向手柄前部的传感器。我在测试时发现距离不是那么大,我猜你可以用电阻器值来获得更好的距离,但我最多只能安装一米。
现在这个第一个系统确实运行得很好,但它需要大量的食物放在桌子上,这反过来吸引了大量的椋鸟。现在不要误解我们的错误Starlings是好鸟,但不是那么有趣,并且使用鸟桌导致了数百张照片。所以我决定尝试不同的方法。
第2步:第二版(新房)

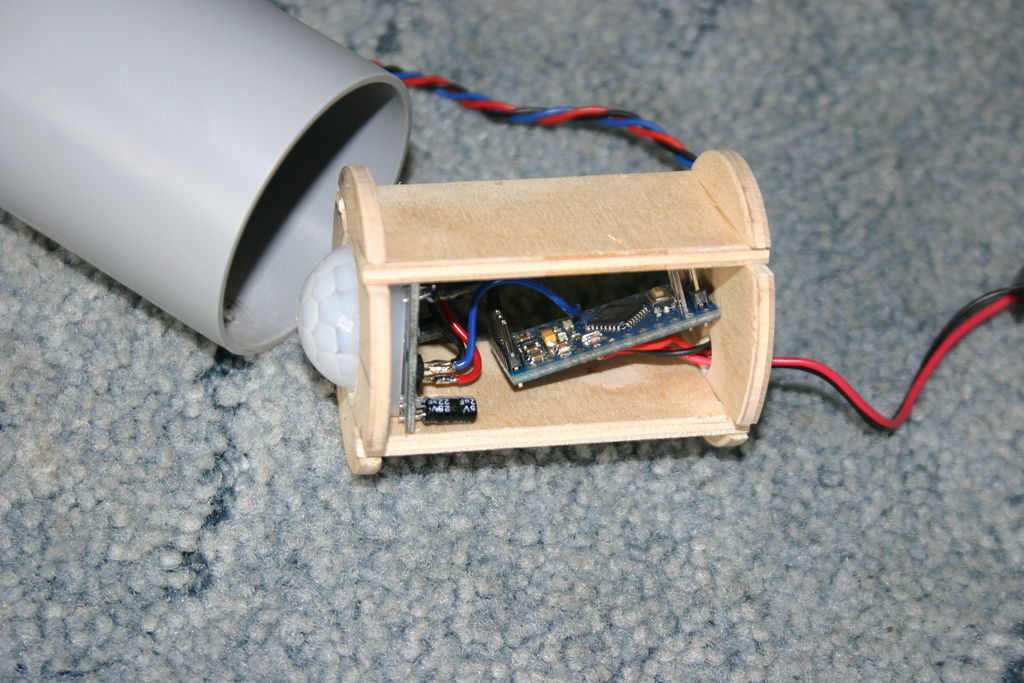
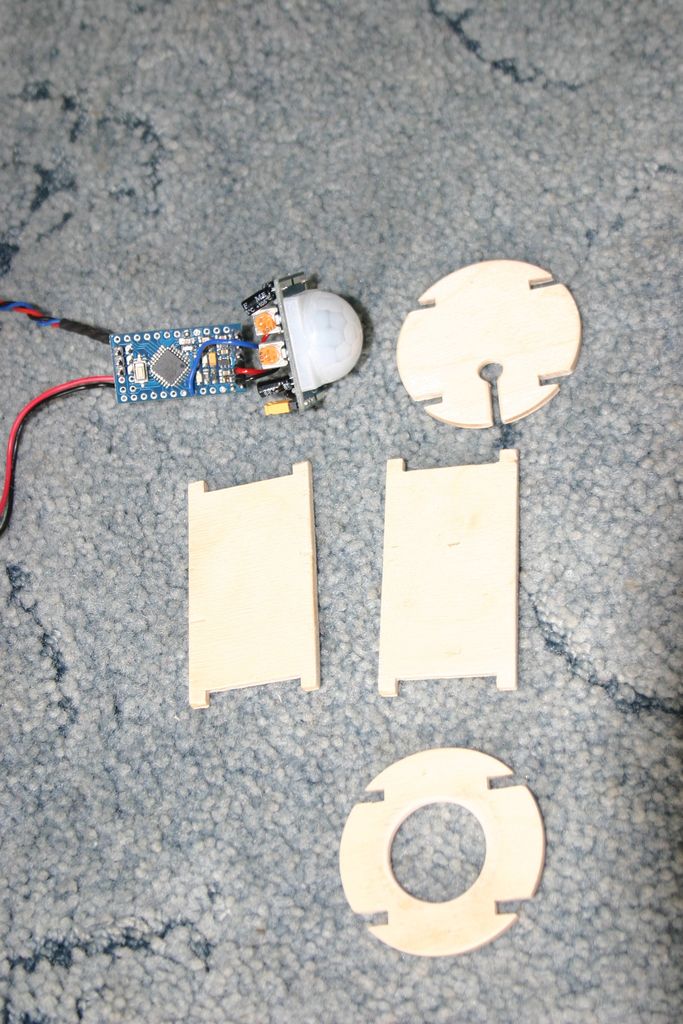


因此在第一次尝试后我决定使用PIR传感器应指向与相机相同的方向。因此,我组装了一个小支架并将该装置放置在一个小孔管(用于棚屋的排水管)中,这样做的另一个好处是可以将该装置向下推到管子上,以提供更小的传感器窗口。我尝试了这个,似乎工作得很好。然后我找到了一个合适的坐骑,并将相机安装在三脚架旁边。
这个版本是否正常工作????
是和不,最轻微的动作(风)或照明(太阳/云)的差异会导致相机拍照。所以说它很敏感是轻描淡写!我有数百张照片,很快就把相机电池拿出来了!
那么下一步是什么?
第3步:对系统的改进! (艺术许可证)


所以第一件事就是做的是停止喂食器移动。这很简单,在其中一张图片中,我将送料器系在另一个送料器上,您可以选择将木制定位销拧入底部。所以这两种方法都运作良好。并且还将进料器放置在其他任何物体都不会移动的区域,这意味着墙壁。 (不是最好的照片,但接下来我们会对它进行排序!)
拍出漂亮的照片并将其打印到画布上以提供漂亮(不动)的背景。
至于云/太阳问题,我在阴凉处设置了喂食器!令人惊讶的工作!但是你需要使用ISO设置或曝光设置来照亮照片。
步骤4:设置相机。
这些新的(现代的) )相机是如此聪明,有时候做一些不同的事情可能是一个挑战,在我的情况下,我必须在我的CANON 700(反叛)上做以下事情
确保你有一个充满电的电池。
关闭省电功能,使相机永不关机。
“上交”LCD显示屏以延长电池寿命。
将相机设置为聚焦在进纸器上,如果需要,甚至可以关闭自动对焦。
关闭三脚架上不需要的IS(图像稳定器)并浪费电池。
将相机设置为在IR上触发。
设置为光圈模式并检查图像时间/曝光调整ISO以使速度快于约1/60。
检查它不会下雨....
第5步:Arduino草图
我不能因为佳能IR已经被这个家伙攻击了整个节目...
Canon IR Hacked
Arduino程序使用音调功能基本上驱动红外LED在设定频率下设定的时间。我已添加循环以检查PIR是否已给出输出。我使用了一个模拟引脚,因为PIR的输出仅为3伏,而arduino没有采用逻辑变化。
int IRLed = 2;
int PIR = A3;
int PIRValue = 0;
void setup()
{
pinMode(led,OUTPUT);
pinMode(IRLed,OUTPUT);
pinMode(PIR,INPUT);
}
void takePicture()
{
unsigned long startTime = micros();
音(2,32700);
while((unsigned long)(micros() - startTime)<472){}//等到完成
noTone(2);
while((unsigned long)(micros() - startTime)<7802){}//等到完成
tone(2,32700);
while((unsigned long)(micros() - startTime)<8274){}//等到完成
noTone(2);
}
void loop()
{
PIRValue = analogRead(PIR);
if(PIRValue >> 500)
delay(2000);
{
takePicture();
}
延迟(3000);
}
-
制作自动传感器门2023-02-08 454
-
车辆违章自动抓拍系统解决方案2022-06-07 1402
-
四元数数控:深圳机器视觉相机怎么分类区别?2021-12-30 668
-
如何制作相机跟拍云台?2021-12-05 1896
-
求一种以雷达抓拍延时为对象的电子警察抓拍延时测量方法2021-04-15 1298
-
违章停车自动抓拍的原理2018-12-25 6094
-
徕卡发布新一代2400万像素无反相机TL2设计风格大气简单2017-07-11 1712
-
工业相机在高速抓拍图像中的应用2015-11-18 8366
-
重要场所高清人像抓拍系统2010-06-12 2993
-
高清摄像手机全方位导购,抓拍,必须滴~!2010-04-01 555
-
云南金隆伟业 一体化高清超速抓拍2010-01-05 2991
-
电子警察,网警相机AG-400IC闯红灯抓拍系统2009-08-21 5269
-
家电自动控制器的制作及电路图2009-05-19 474
-
水箱自动上水控制器电路及制作2009-04-14 5538
全部0条评论

快来发表一下你的评论吧 !
