

无人机制作图解
电子说
描述
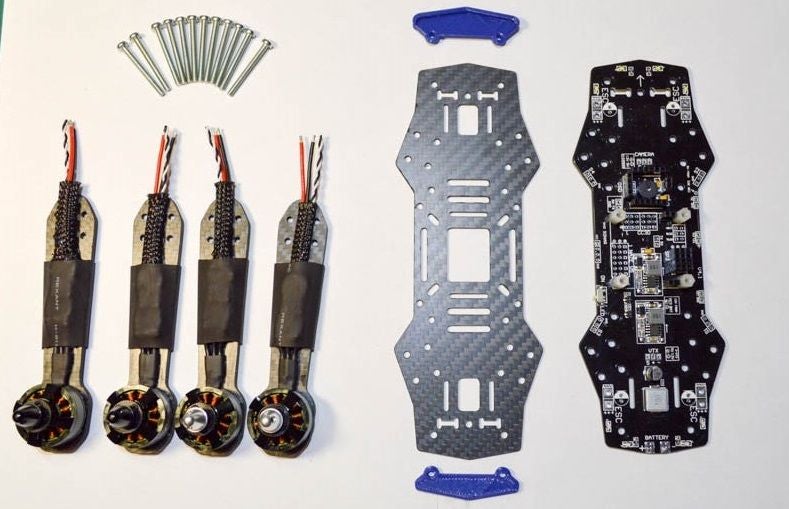
第1步:零件清单
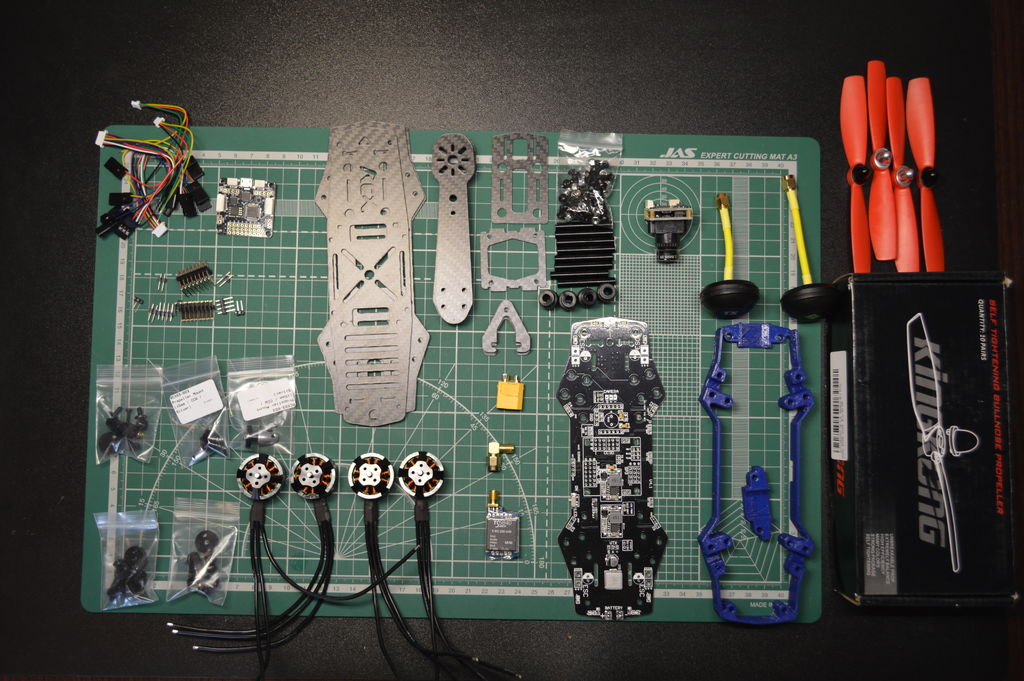

框架 - 我建议购买ZMR250框架,它是一个流行的框架,不花费太多,耐用,廉价的备件和3D打印机上的大量升级。我建议买这个框架。这种框架价格便宜,由优质碳制成,带有额外的孔和槽,便于放置和固定直升机部件。
电机 - 来自不同供应商的电机有很多新版本,很难推荐任何特定的电机。在这栋楼里,我使用的是RCX H2206 2250KV电机,它看起来不错,但我以前没用过它。重要的是,您可以找到更换这些电机,轴承和轴的部件,CCW螺旋桨安装座。同样有趣的电机Rctimer FR2205-2300KV,Rctimer FR2306-2300KV,SunnySky X2204S-16 2300kV Generation II。你需要4个,但为了备用,我建议购买5个,相同的ESC。
ESC - 将ESC与BLHeli固件一起使用。在这栋楼里,我使用Rctimer Mini ESC20A,但强烈建议使用新的ESC Racerstar RS20A BLHELI_S,非常好的ESC,价格低廉。
飞行控制器 - 建议像这样一个或更好的F3 EVO飞行控制器一样使用SP Racing F3飞行控制器
视频发射器 - 我推荐使用带有RACE BAND 200mW的40通道视频发射器。有许多不同的发射器,不是很昂贵,一个很好的例子是Everyine TS5840升级版40CH 5.8G 200mW发射器,这一个更好的FX795T-2
相机 - 我用相机SONY EFFIO芯片在这栋楼里,我用一个购买了她。但我非常推荐这款Foxeer XAT600M HS1177或Foxeer HS1190 Arrow
PDB - 为了简洁,易于组装,我只使用这款PDB。这是适用于SP Racing F3飞行控制的最新版本。只是BEC直接位于主板上,没有必要像以前的版本那样焊接它们,它要好得多。有一个跳线,为相机和发射器供电,电压为5或12伏。如果您不想使用此PDB,我建议您购买这样的主板。
电池 - 以最高可能的放电率购买4S battareis C.我从这里或这里使用Dinogy 1300mAh 14.8V 4S 65C价格定期更换,选择更便宜的地方。
螺旋桨 - 好的道具KingKong 5045,便宜又耐用。现在越来越受欢迎3刀片道具或10对Kingkong 5040 5x4x3
遥控器 - 我使用TARANIS X9D Plus + x4r recciver。很好的控制,很多人使用它。 x4r接收器体积小,具有SBUS连接,当较小型号的空间有限时非常有用。在这里购买。
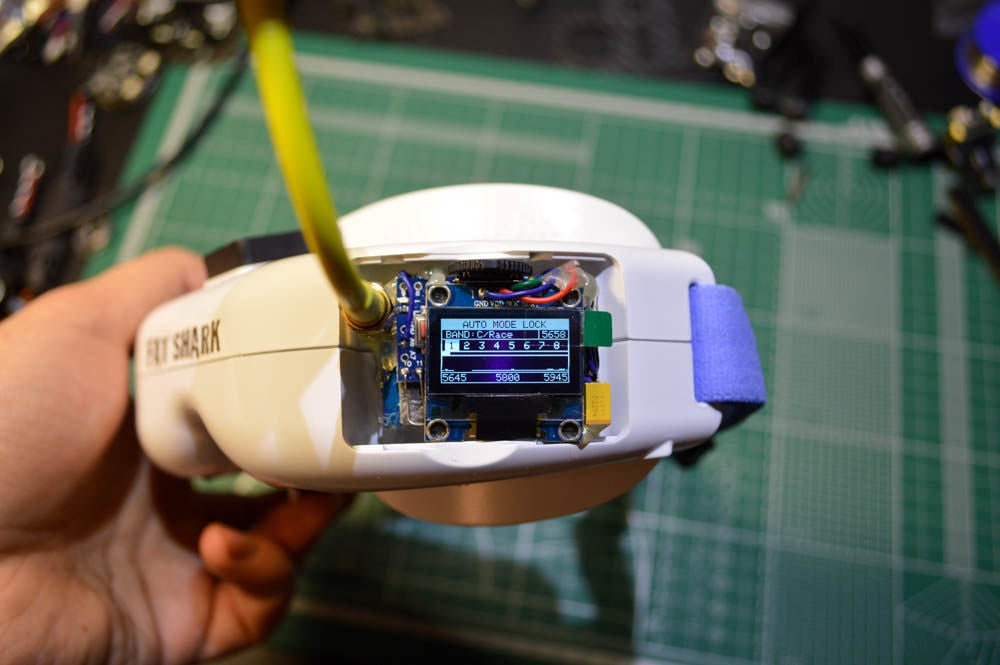
FPV护目镜和接收器 - 我使用带有DIY模块的Fatshark Dominator V3。相当有趣的选项头盔。
Spacer在3d打印机上打印。
OSD-屏幕显示,可选。
螺栓 - 16个M3x30
电池带
涤纶魔术贴Peel-n-stick
XT60连接器
热缩桶约20-22 mm
LED带(可选)
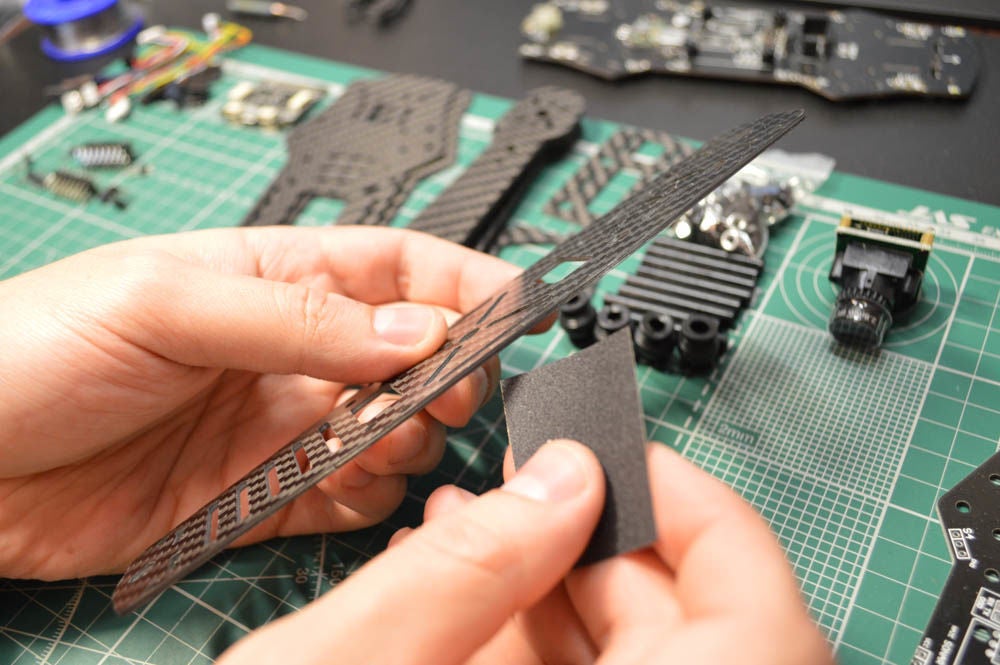
第2步:电机




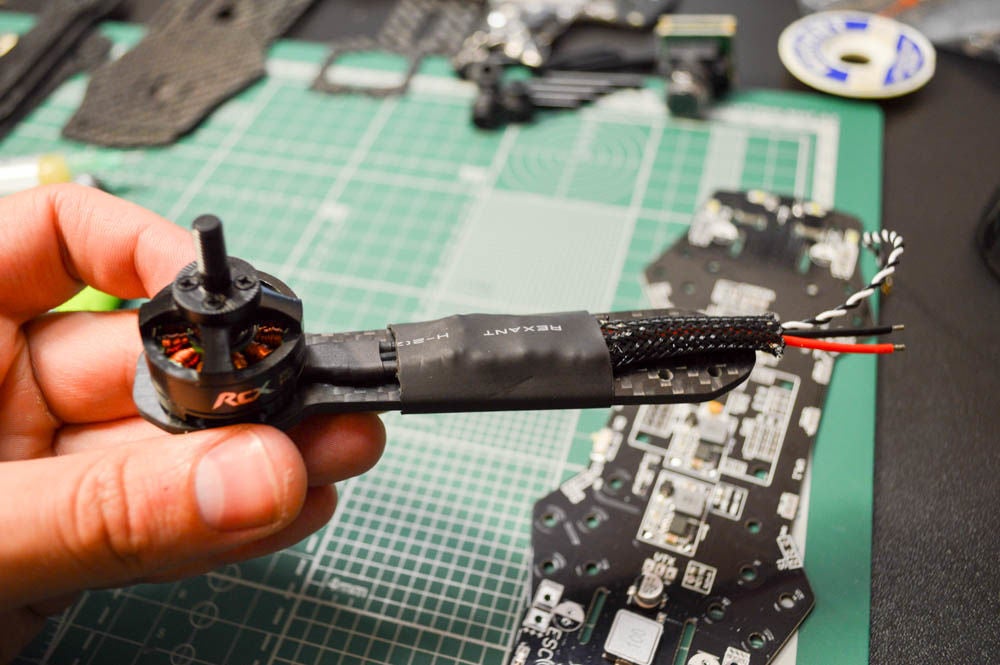
让我们从电机开始。
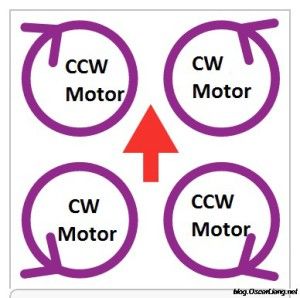
有些电机有CW(顺时针方向) )和CCW(逆时针)螺旋轴螺纹。不同之处在于螺旋轴上的螺纹方向相反。这意味着可以通过顺时针旋转固定一个螺母,另一个螺母需要沿另一个方向旋转。他们称之为“自锁”,因为在四轴飞行器上我们有2个电机旋转CW方向而另外两个旋转CCW。当电机旋转时,螺母会自动拧紧并且不会松动。
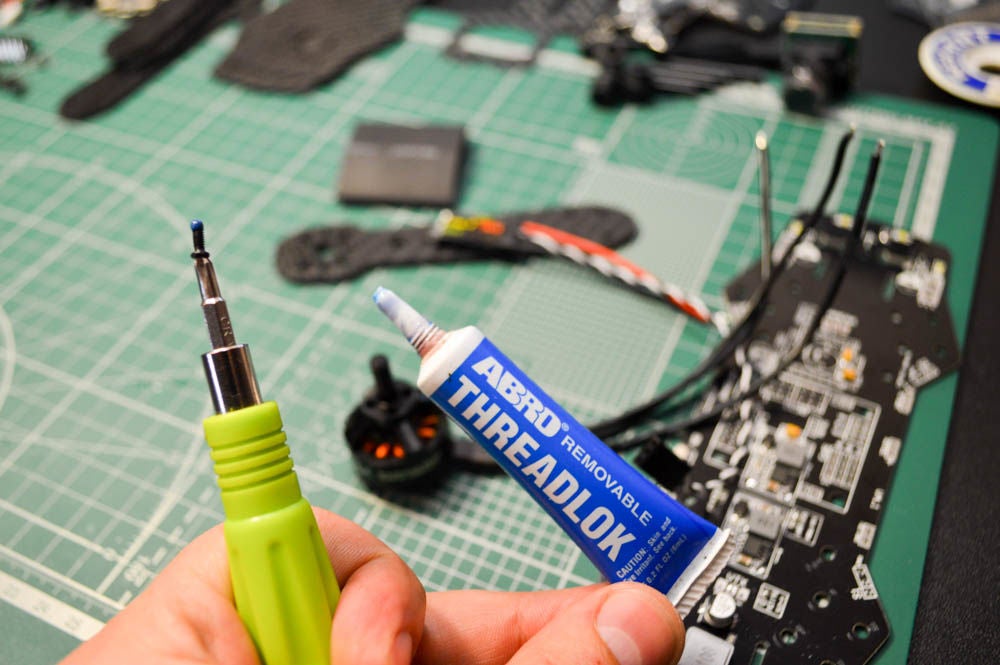
让手臂上安装电机,我建议使用螺纹锁,最好是中间锁(蓝色)。 (请勿使用红色螺丝,否则以后永远无法松开螺丝。)
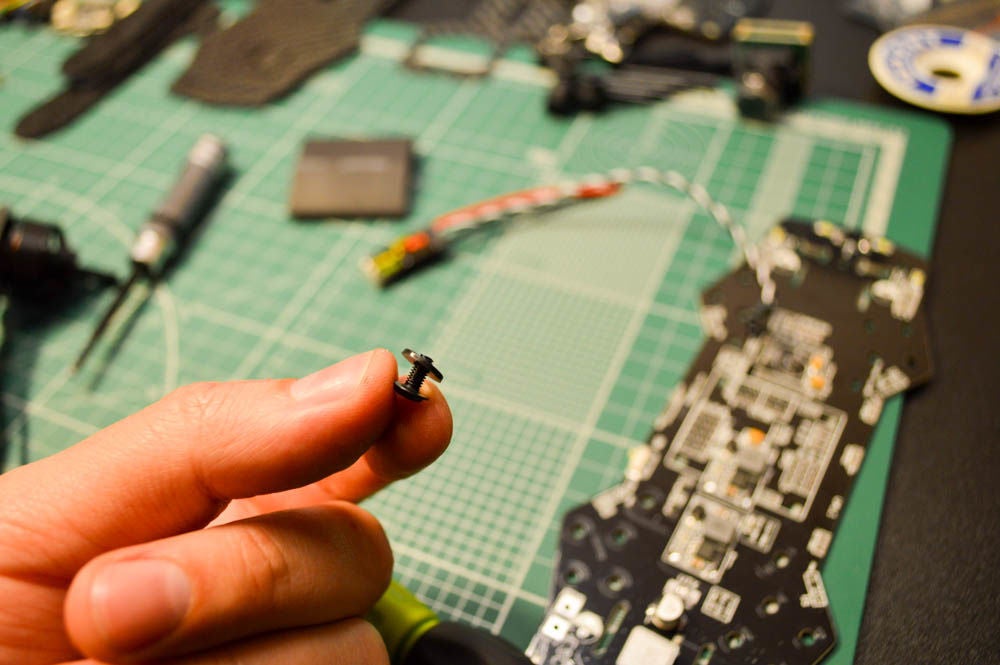
拧紧螺丝时要小心,有时螺丝会取出电机内部的导线,可能会导致短路和损坏电机,可以使用塑料或金属垫圈。
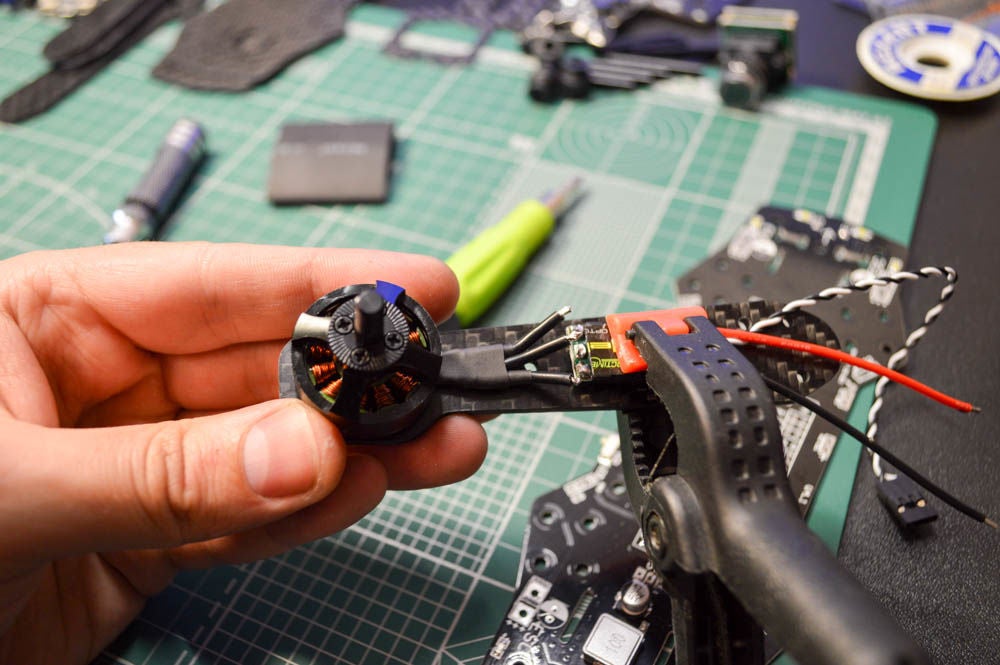
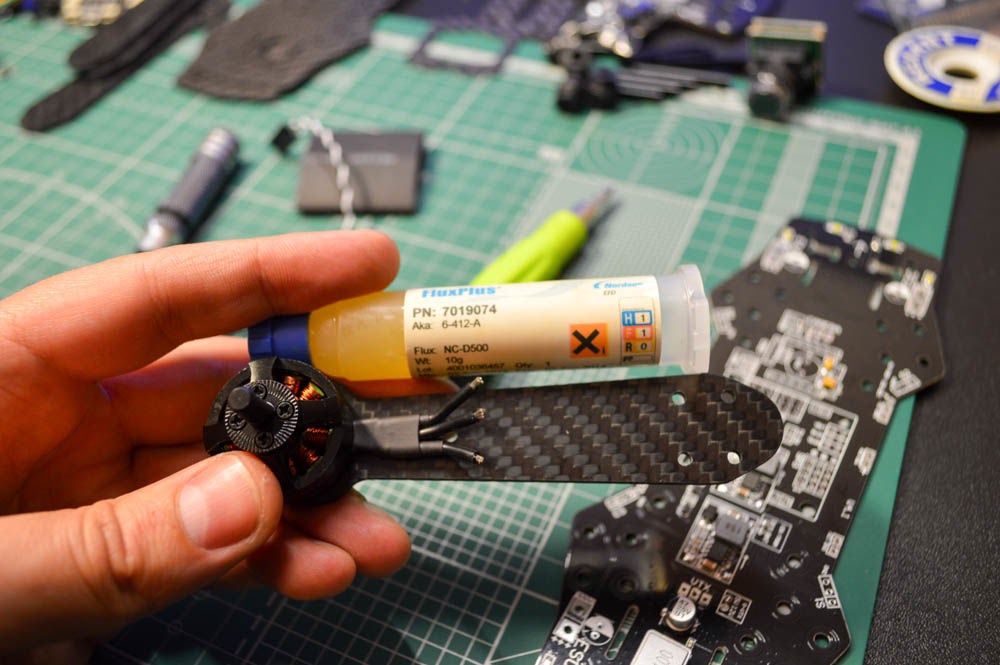
切断多余的电线,从电线上取下绝缘层,从ESC上切下一些收缩管,使用焊剂和焊料。从ESC拆下电线,并将电线从电机连接到ESC。
使用热缩管将ESC固定在臂上。有些人将ESC放入框架中。我建议你不要这样做,ESC在工作期间加热,需要冷却。框架内没有冷却,ESC经常烧坏。
您可以用相同的方式将电线连接到所有4个ESC,然后在BLHeli Suit中更改2个电机的旋转方向。
步骤3:PDB - 配电板
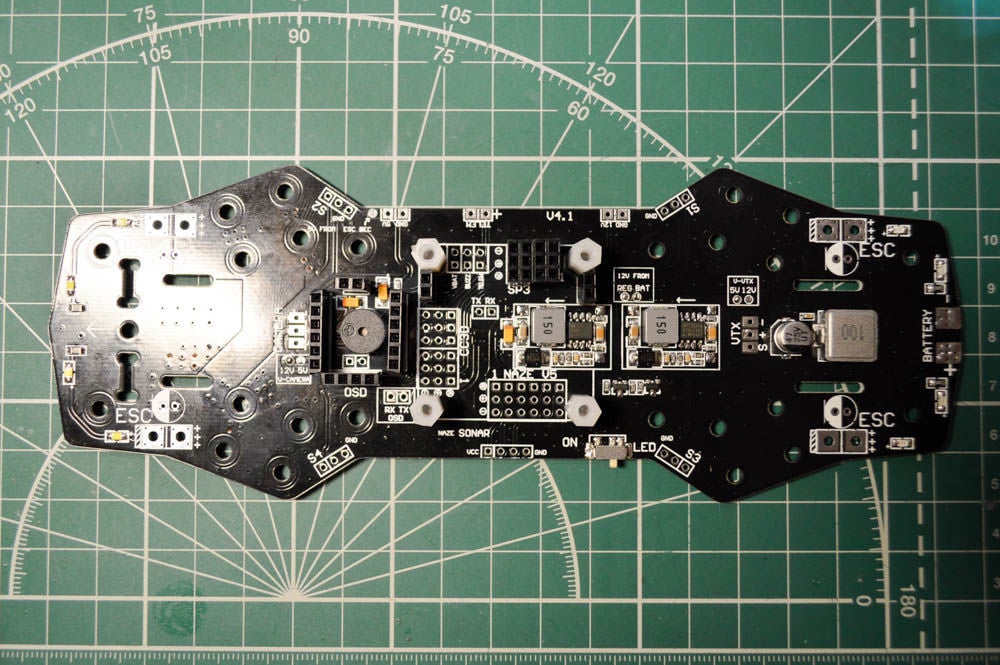









PDB的新版本非常有用,它具有所有必要的连接器,无需一堆电线即可轻松安装。
让我们开始吧。
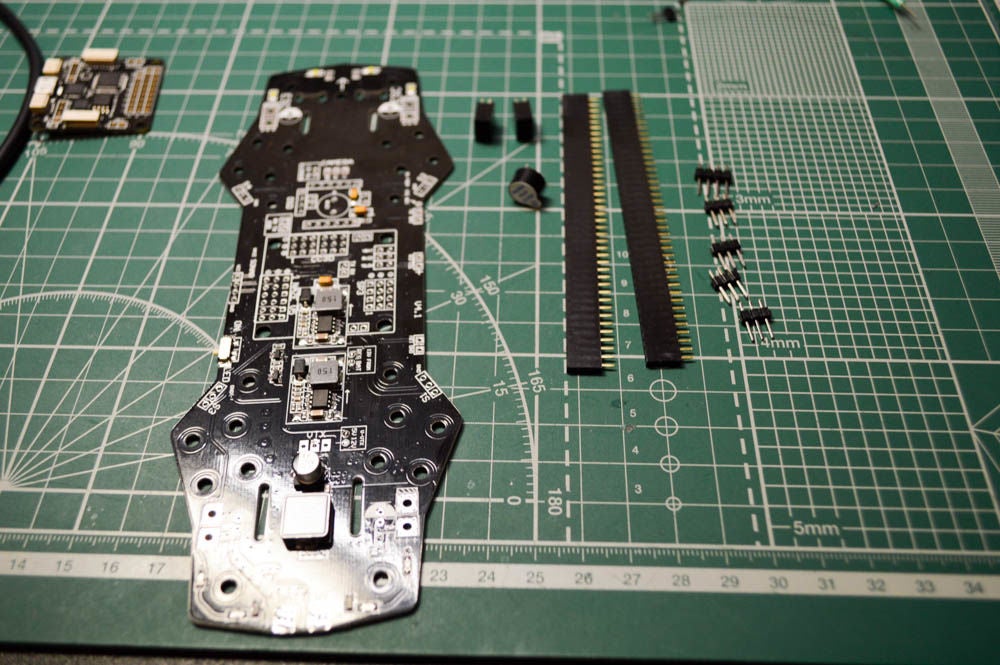
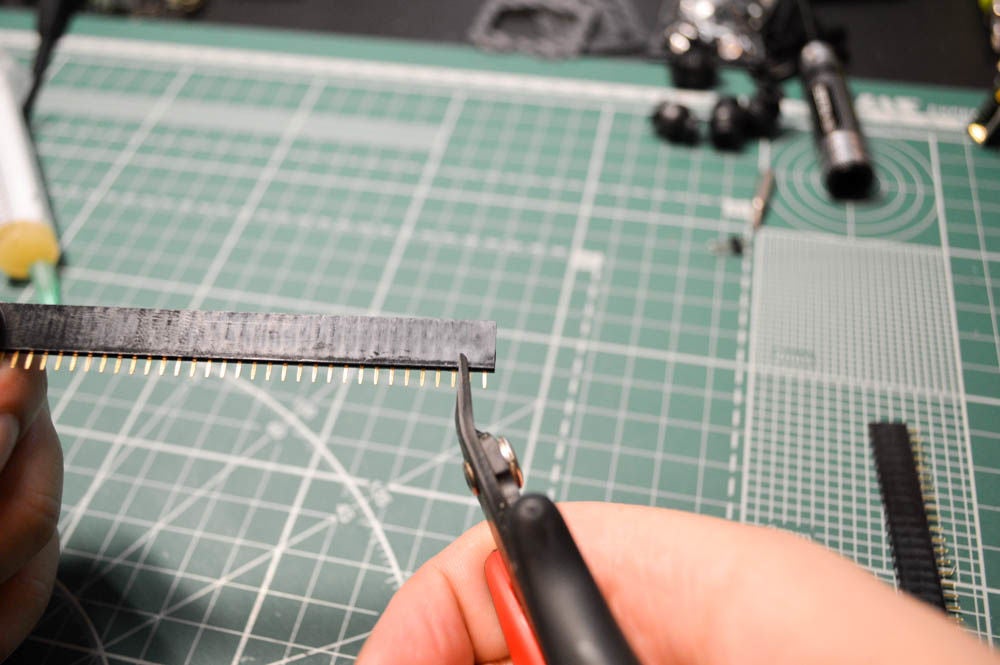
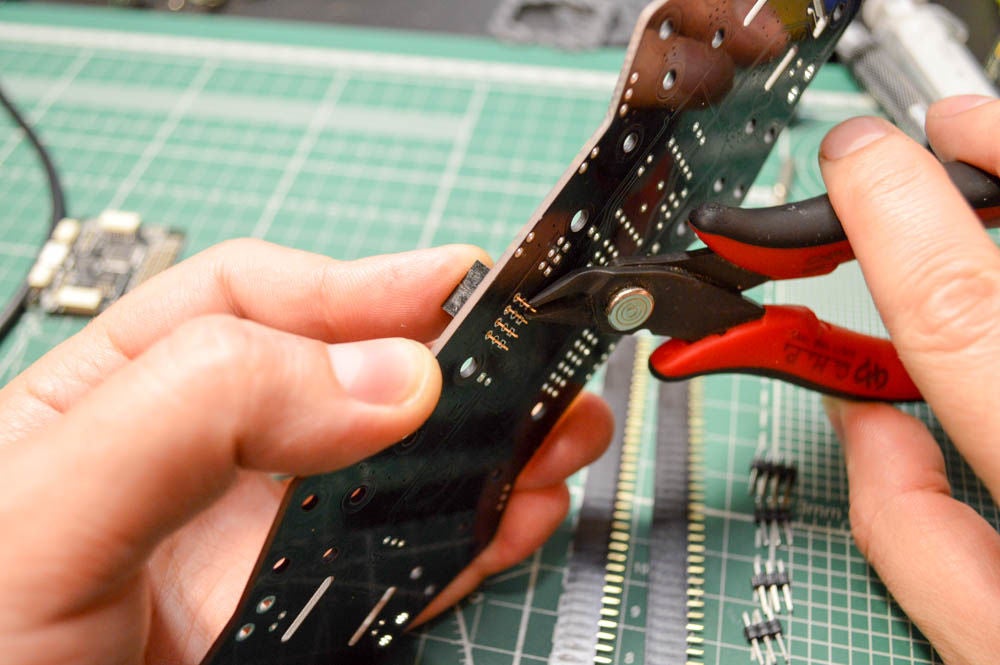
PDB套装中的焊针和蜂鸣器(当您在高光罩中丢失直升机时非常有用)。切断销的延伸部分。焊接它们,使用助焊剂。
PCB有跳线选择摄像机和VTX电源电压,5伏和12伏。您必须使用与您的相机和VTX viltage相匹配的垫(5或12伏)。
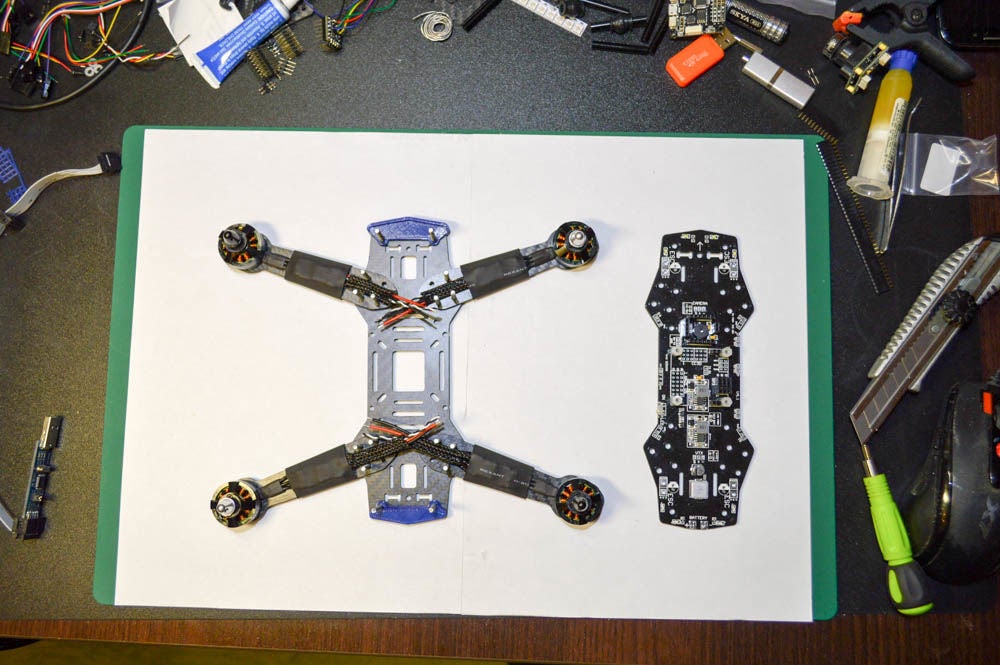
使用16个M3x30螺栓,框架的下板和PDB。把它们全部放在一起。正确放置CW和CWW电机。
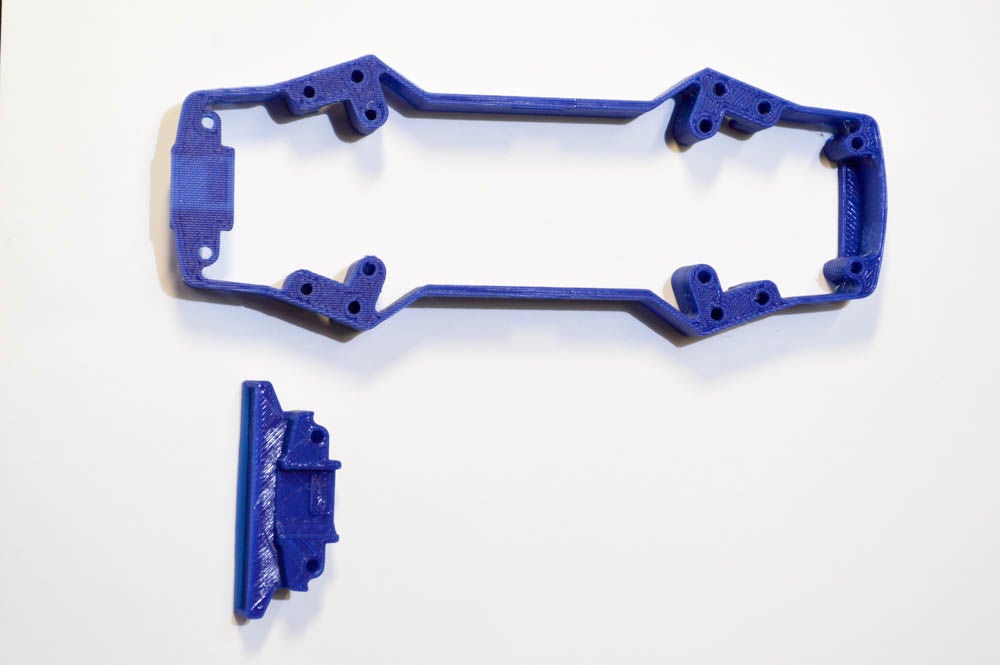
使用3d打印的保险杠使框架更耐用,并保护您的PDB免受冲击。
焊接ESC线到PDB焊盘。
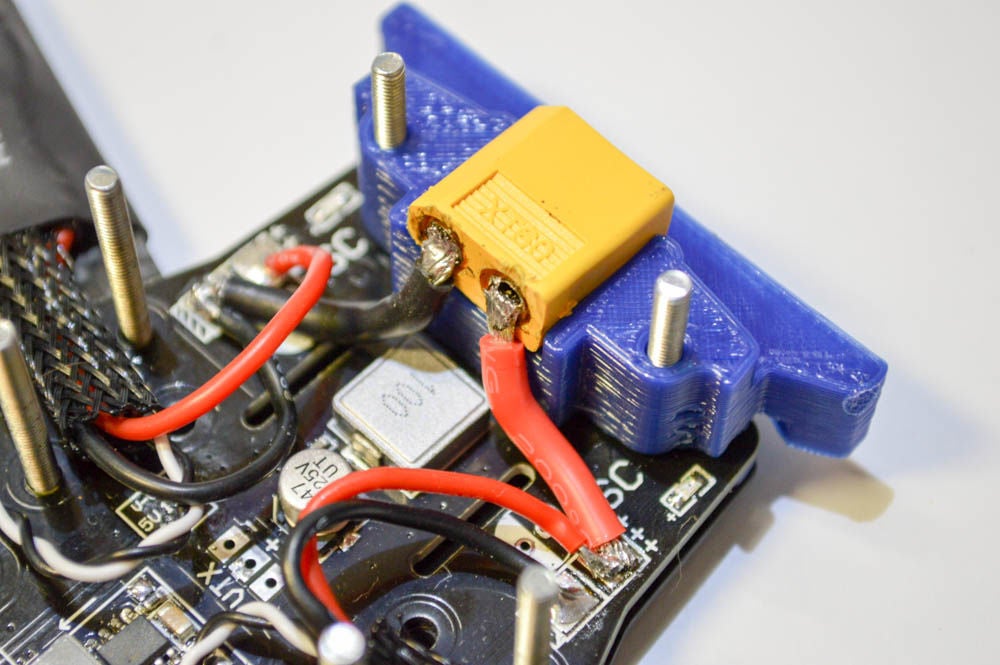
打印垫片和底部XT60支架。
我被切割XT60引脚,因为我需要更多的空间来放置VTX。将导线焊接到XT60,然后焊接到PDB焊盘。
第4步:飞行控制器



有两种类型的FC,acro和deluxe。豪华版有一个额外的气压计和磁力计。对于赛车quadrocopters来说不是必需的功能。特别是如果你不使用OSD。
将Flash Betaflight固件发送到FC。
转到此处下载飞行控制器的betaflight固件hex文件
单击您想要的固件(例如“betaflight_2.7.1” _SPRACINGF3.hex“适用于SP Racing)
单击标有”Raw“的按钮。单击网页上的任意位置,然后选择”另存为。..“到计算机上的某个位置。 (如果文件名是“betaflight_2.7.1_SPRACINGF3.hex.txt”,则在单击“保存”之前删除“.txt”)
安装Cleanflight配置器
使用启动插入SP Racing垫短路并打开Cleanflight配置器(如果已选择自动连接,则单击断开连接)
单击“加载固件本地”并找到您保存的HEX文件。 (您可能必须将“文件类型”设置更改为“所有文件”才能找到hex文件)
单击“Flash”(您可能第一次失败,只需再次按闪烁)
FC的一些基本设置。
校准加速度计
SETUP故障安全!!!
如果以不同于箭头指示的方向安装FC板,则需要在设置中指明。转到CLI页面并写入 - SET ALIGN_BOARD_YAW = 90(向左箭头指示)按Enter键
写入“保存”按Enter键
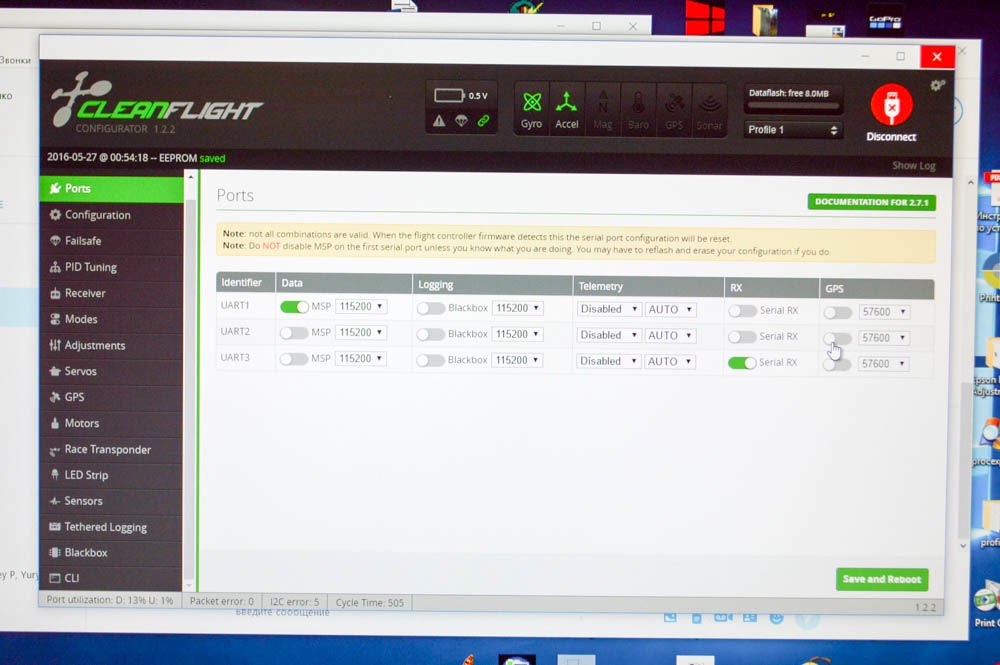
在UART3上的“端口”页面上的串行接收上的Swith
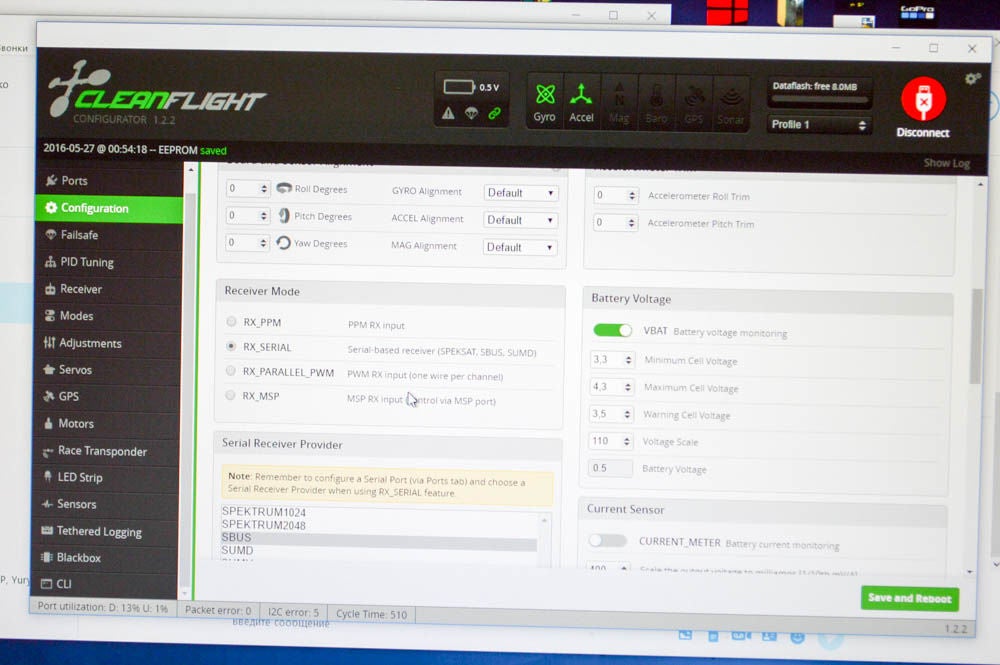
在配置页面选择Reciver Mode - RX_SERIAL,Serial Reciver Provider - SBUS
不要忘记在更改后保存设置
进一步调整飞行控制器,按照制造商的说明并观看视频说明。我没有写下所有的时刻,因为它会为另一条附加指令提供很多信息。
步骤5:ESC(电子速度控制器)设置



现在配置ESC。通过我们的SP赛车控制器(作为NAZE32),我们可以同时定制我们的ESC。为此,需要满足以下条件:
在FC上运行Betaflight
已在ESC上运行BLHeli
安装在ESC上的BLHeli Bootloader现在也在使用SimonK Bootloader。固件和引导程序不是一回事。
BLHeliSuite的最新版本
将控制器连接到计算机并为PDB供电。
下载并运行BLHeliSuite。
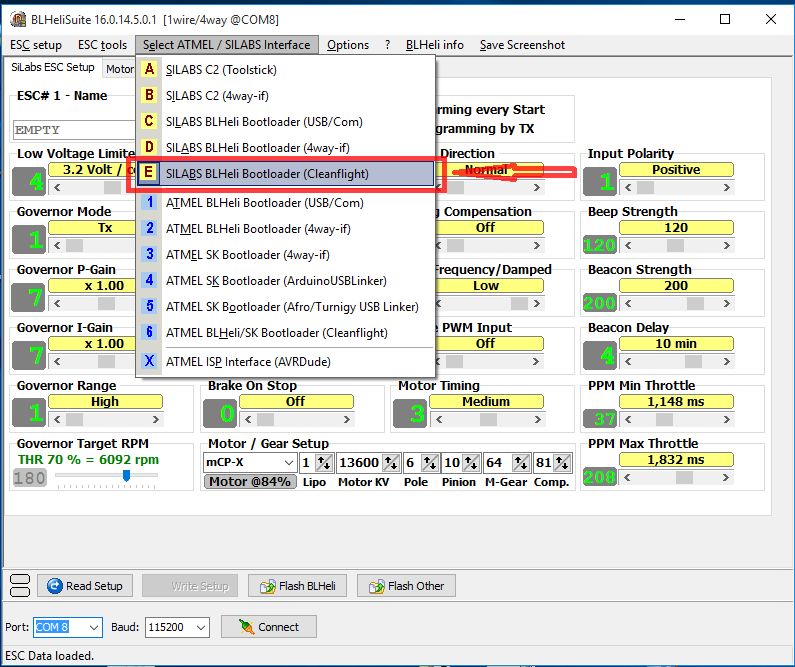
首先,在BLHeliSuite中,选择你的界面,选项末尾有(Cleanflight)。
如果选错了(Atmel或Silabs),请不要担心,如果您选择了错误的界面,将会收到警告。
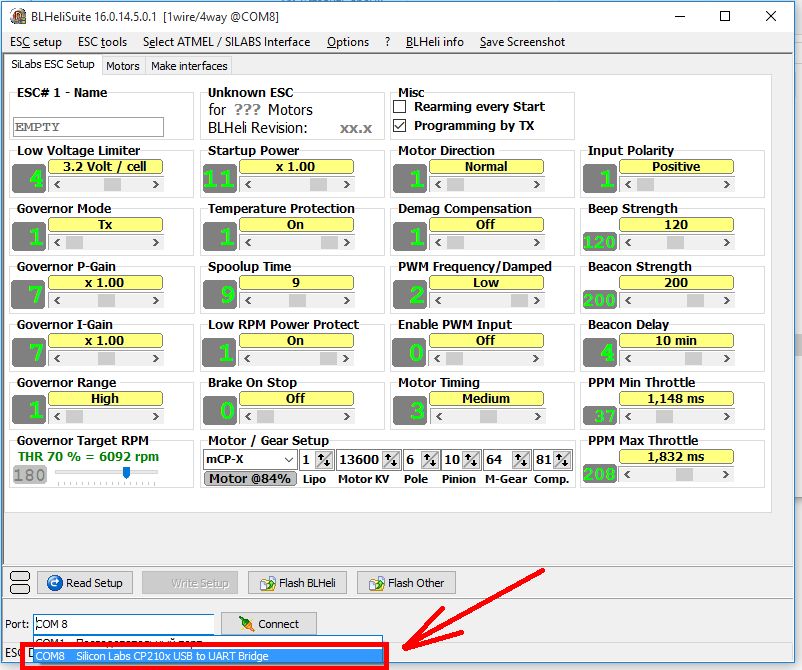
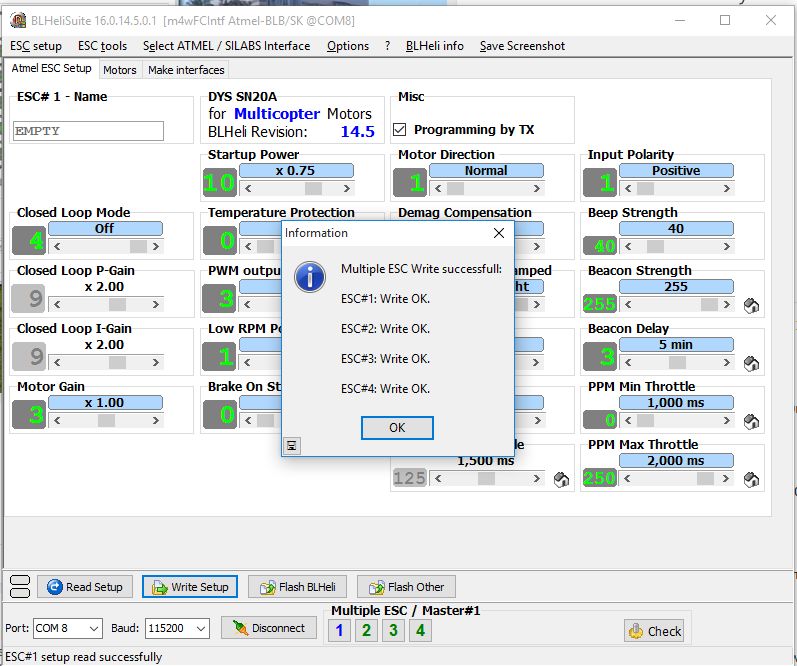
连接和读取设置。选择正确的接口和飞行控制器的COM端口后,单击“连接”,然后单击“读取设置”。
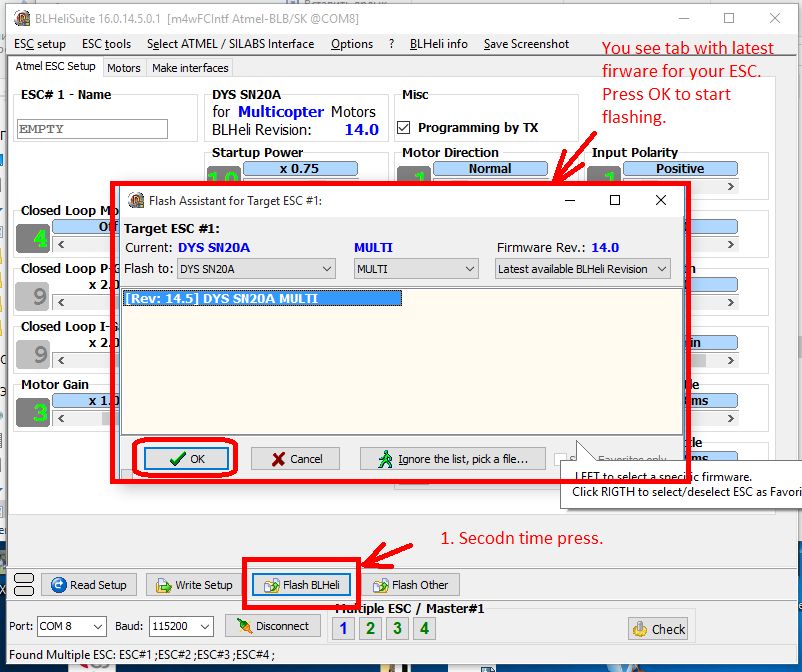
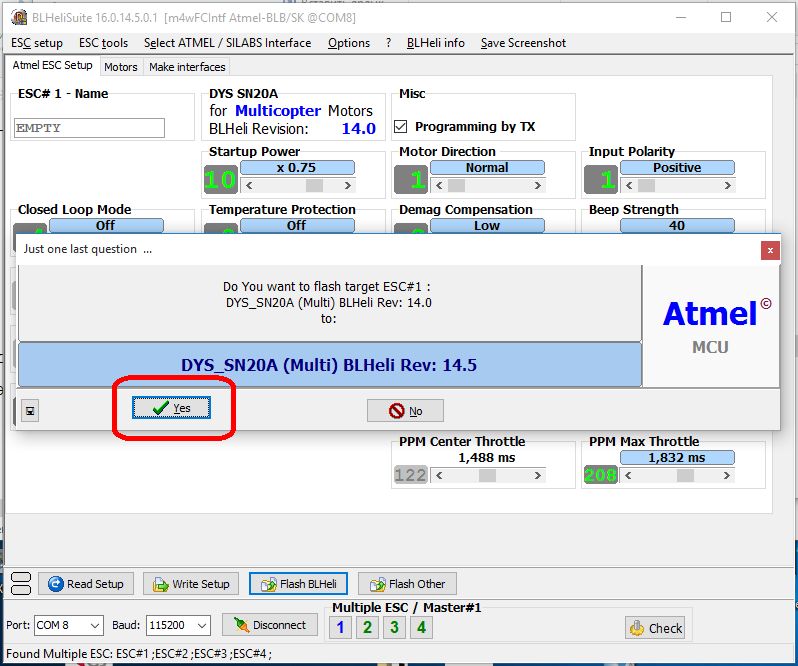
Flash最新BLHeli固件。
您可能会看到此消息“设置不与主人同步“。这基本上意味着您的一些ESC有不同的设置。包括PPM Min/Max和PWM Frequency/Damped等设置将触发此警告。电机旋转设置的差异不会触发此警告。
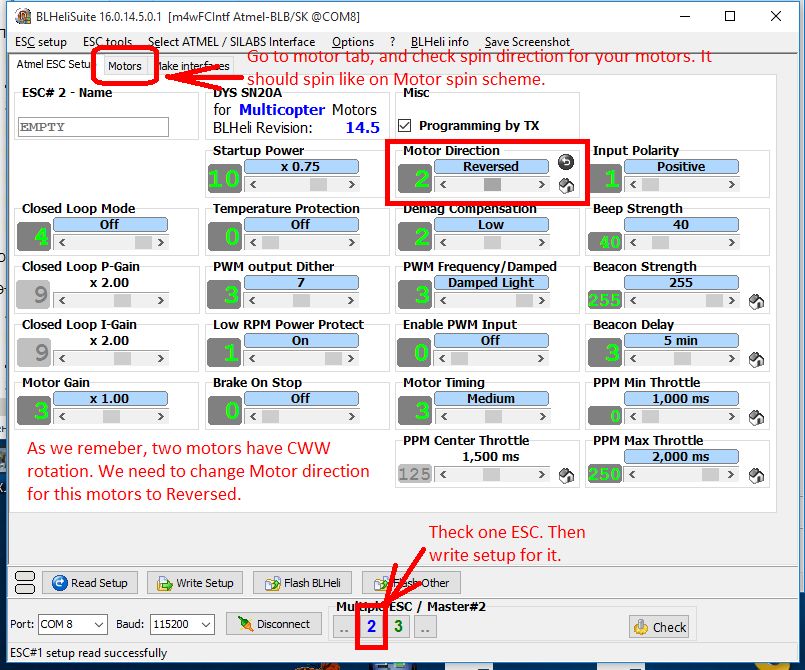
您必须将所有ESC配置为相同,但是对于两个CWW电机,将值更改为反向旋转。
一旦编写了所有ESC,就要进行最终检查。右下角有一个Checkbutton。以下显示All Okay消息。你应该看到所有的ESC都是绿色的。 (ESC 1除外是蓝色,因为它是主ESC)
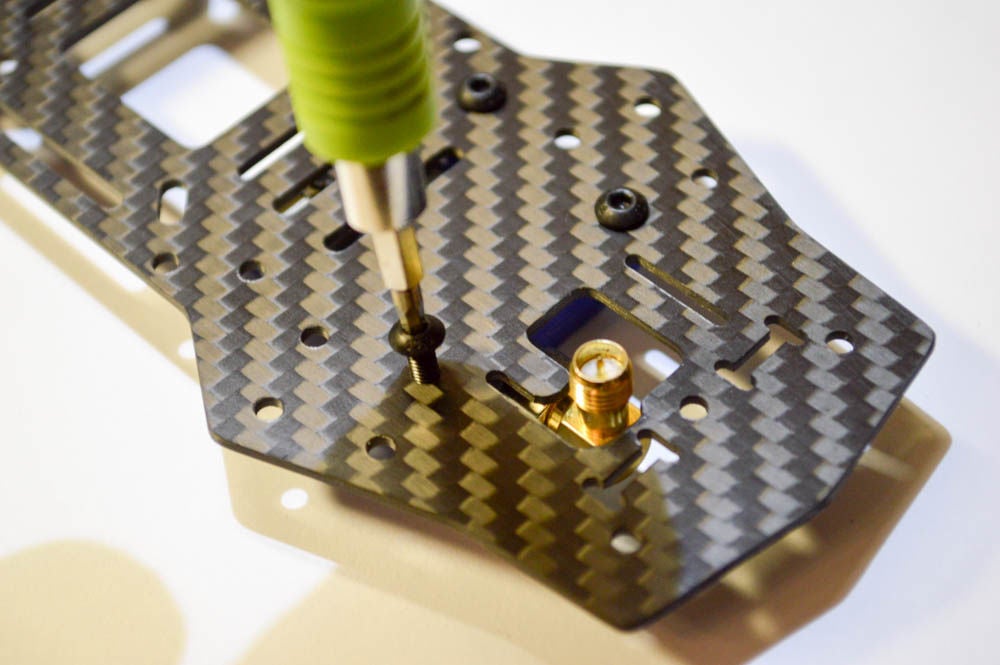
步骤6:Camera,Reciver和VTX。最终装配
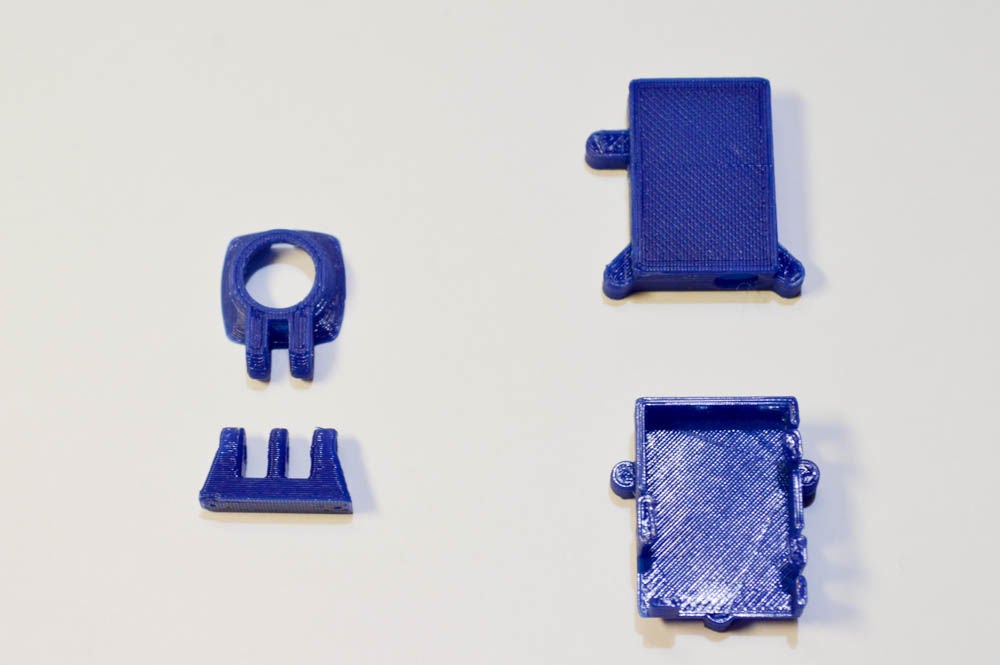


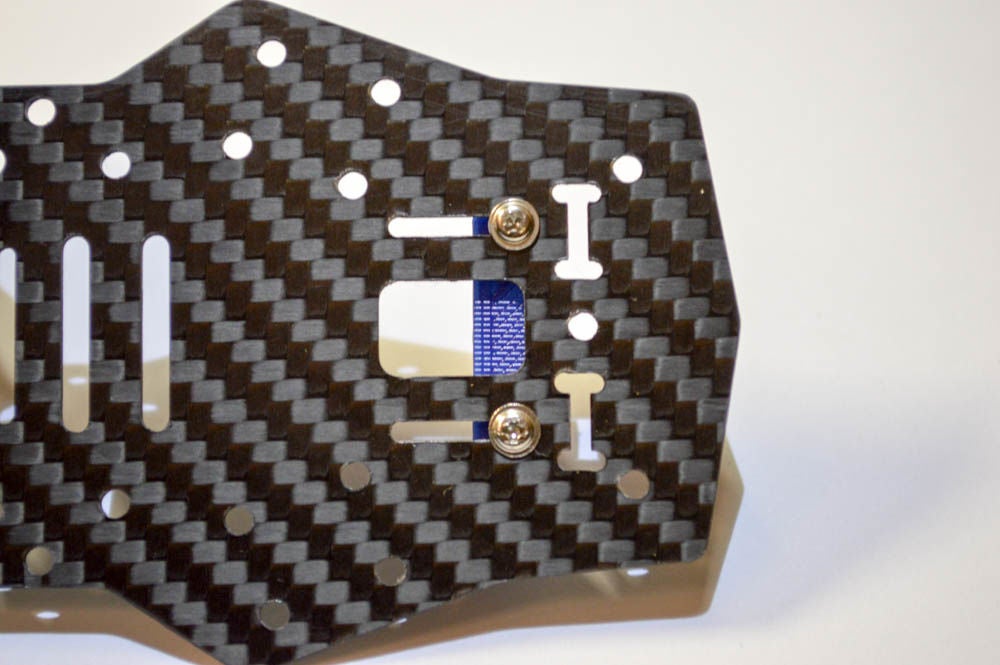




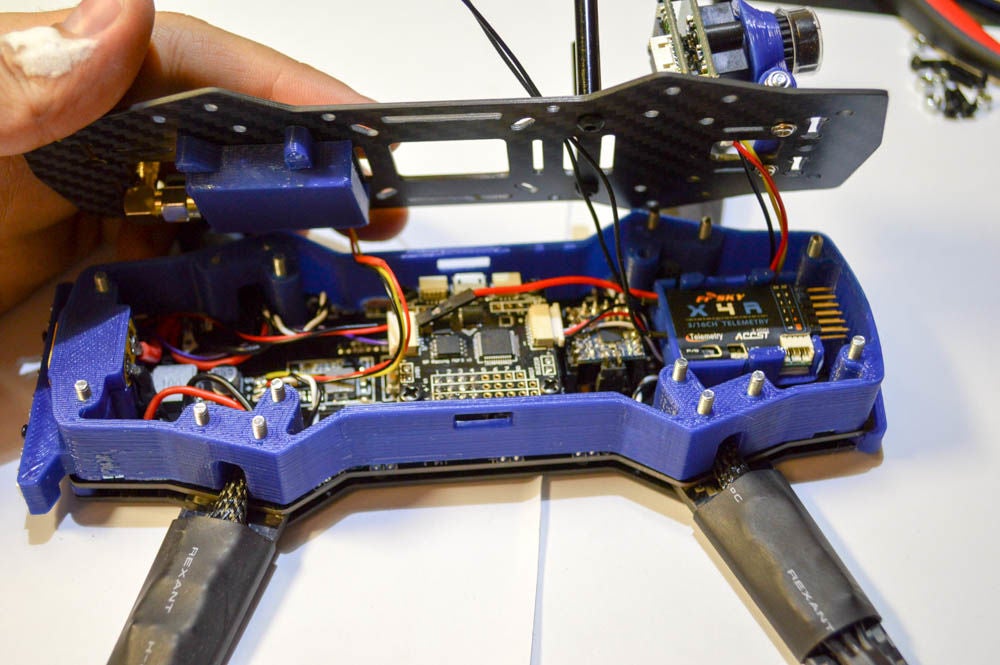


我为reciver和VTX制作了3D打印支架。如果您使用与我相同的硬件,则可以使用它。
将VTX和相机线焊接到PDB。
安装摄像机,VTX和接收器支架。将电线连接到它。
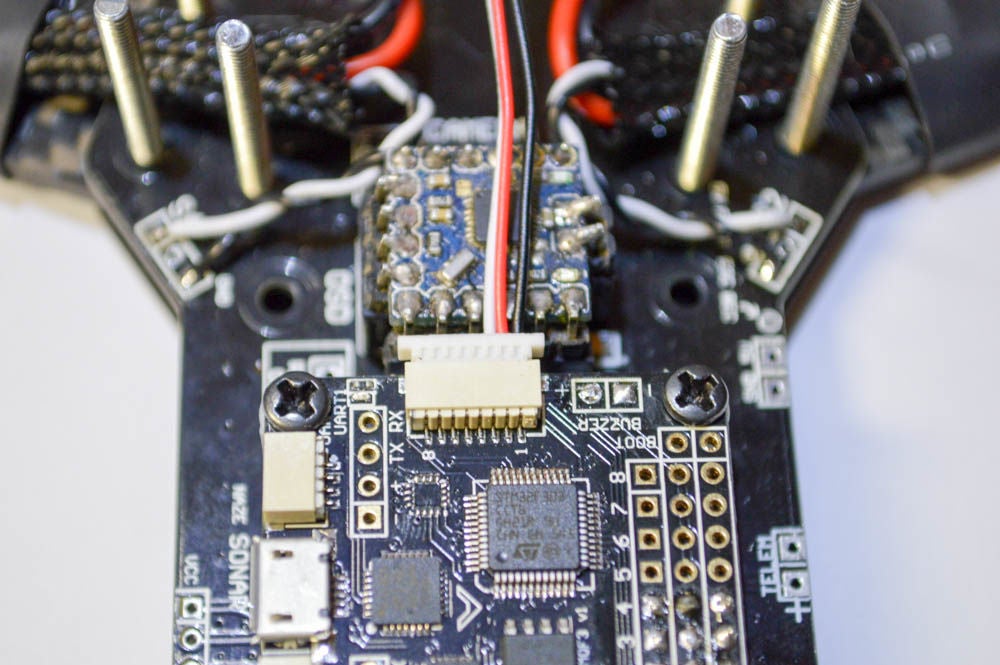
将您的接收器连接到FC。我只留下3根电线用于SBUS协议。
放置3d打印垫片。
如果你有WS2812 LED,你可以只使用FC的3根线将它连接到控制器。
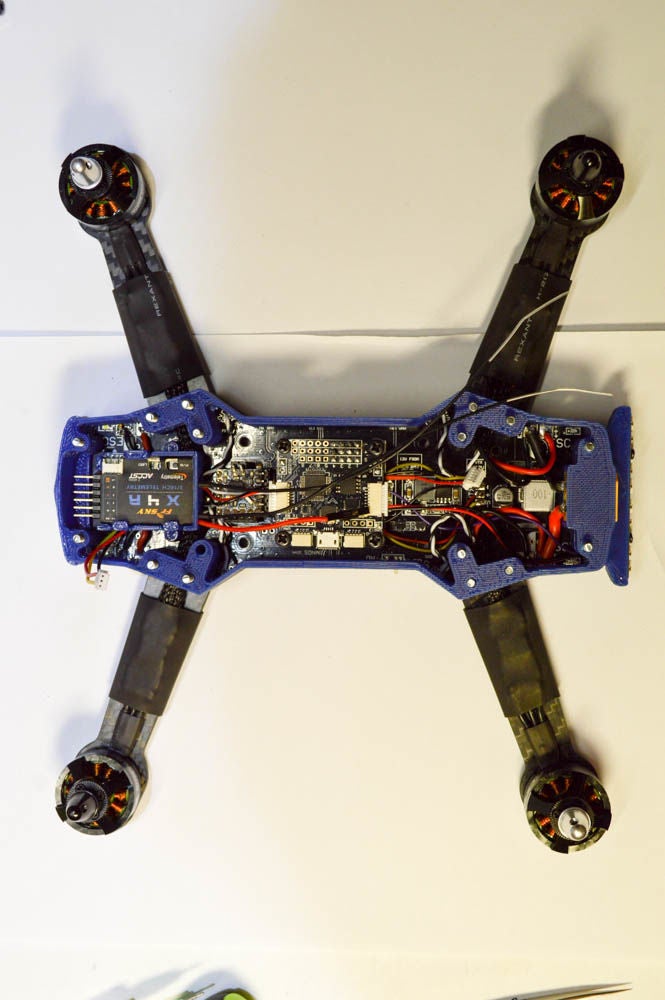
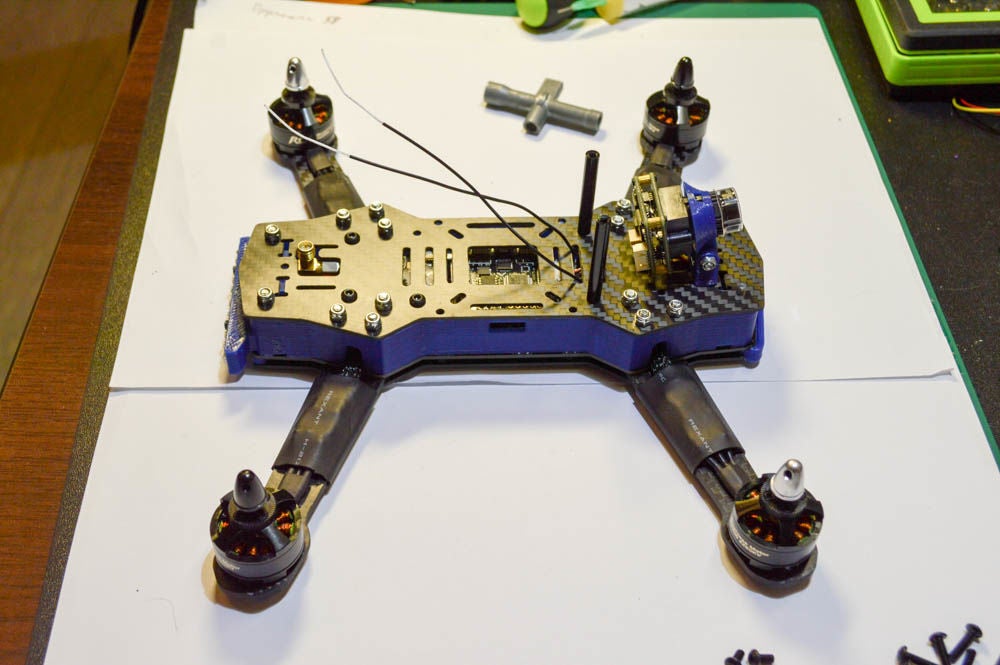
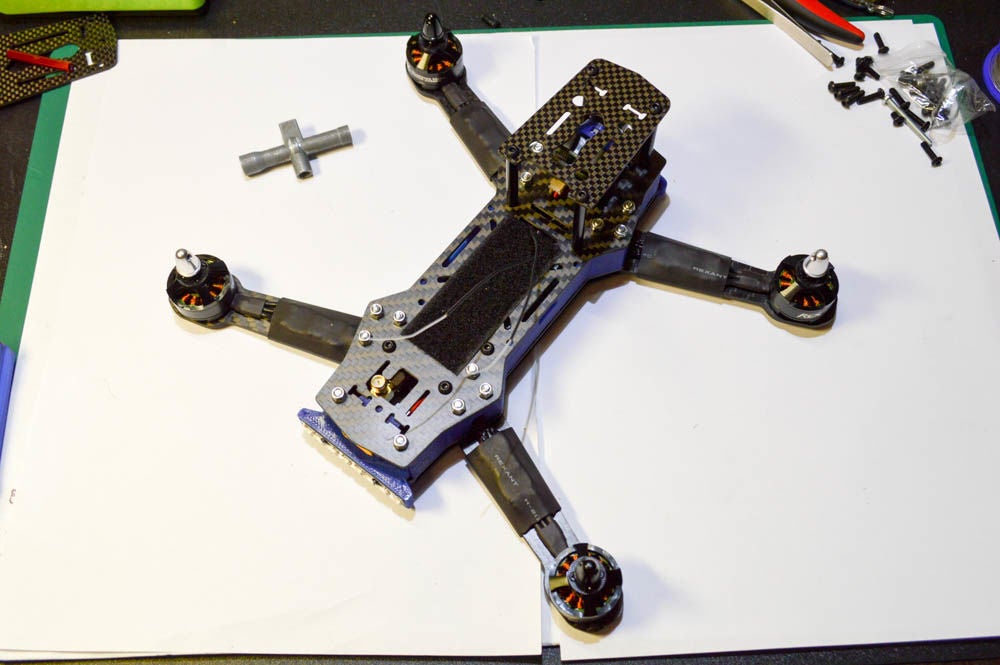
安装主甲板并修复螺丝。小心不要夹住电线。
安装从上层板上切下来。
将尼龙搭扣带固定在甲板和电池上。
完成。
- 相关推荐
- 热点推荐
- 无人机
-
【OK210申请】无人机制作2015-07-14 1763
-
无人机遥感技术2016-03-11 8098
-
普及无人机知识2016-06-24 4015
-
无人机制造2016-10-07 4713
-
无人机培训2017-02-13 4233
-
无人机侦测和反制系统2017-04-05 8596
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3803
-
基于F1飞控板的无人机制作2021-09-13 2319
-
无人机仿真总体概述2021-09-15 1969
-
利用WIFI控制无人机的教程2022-07-28 4024
-
制作无人机的小型PCB2022-08-01 2105
-
创意小夜灯制作图解2018-09-07 15682
-
发电机模型制作图解2018-09-17 13370
-
关于如何制作一个无人机2018-10-19 38536
-
新型战斗机制的无人机制作图解2019-08-28 4172
全部0条评论

快来发表一下你的评论吧 !
