

如何用树莓派构建一个乐高坦克
电子说
描述
第1步:构建坦克
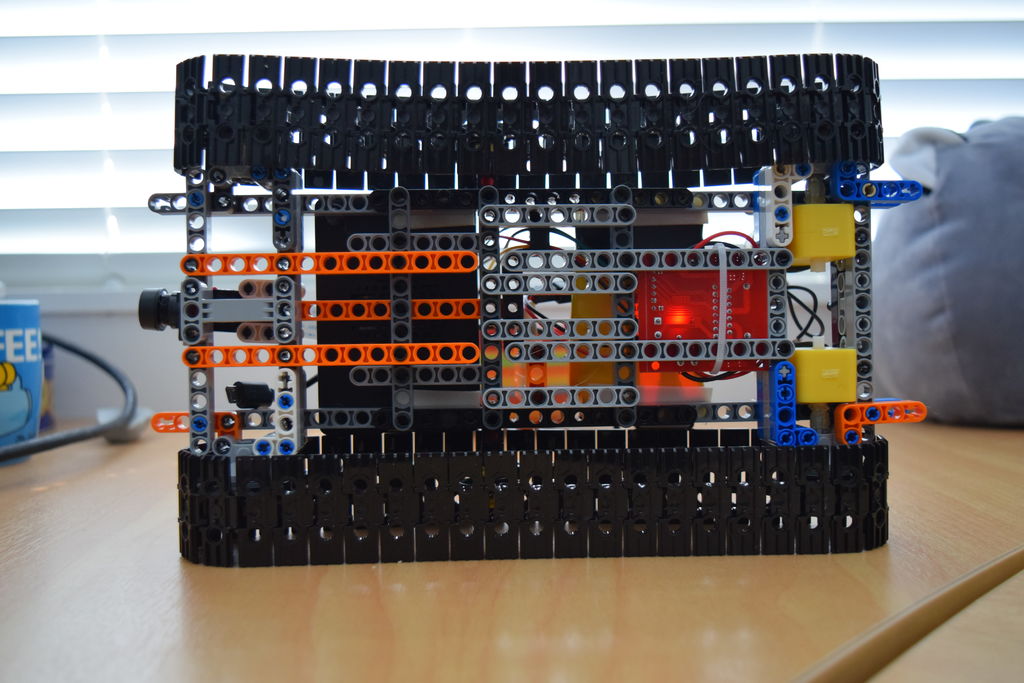
所以这些不是真正的指令,因为这一步应该是真的你自己的设计。我将谈谈在构建这个时我必须考虑的一些事情,但真正的乐趣在于找到自己(很像实际的乐高)。使用这些照片如果有用,我花了很长时间来开发这种设计,最后,简单的道路是最好的。
首先构建后轴
和确保为电机留出足够的空间,并使它们足够宽,以便您将组件安装在内部。我希望我的相当宽,因为我希望所有东西都坐在车轴内,这样就可以让坦克在东西下很适合追逐猫。
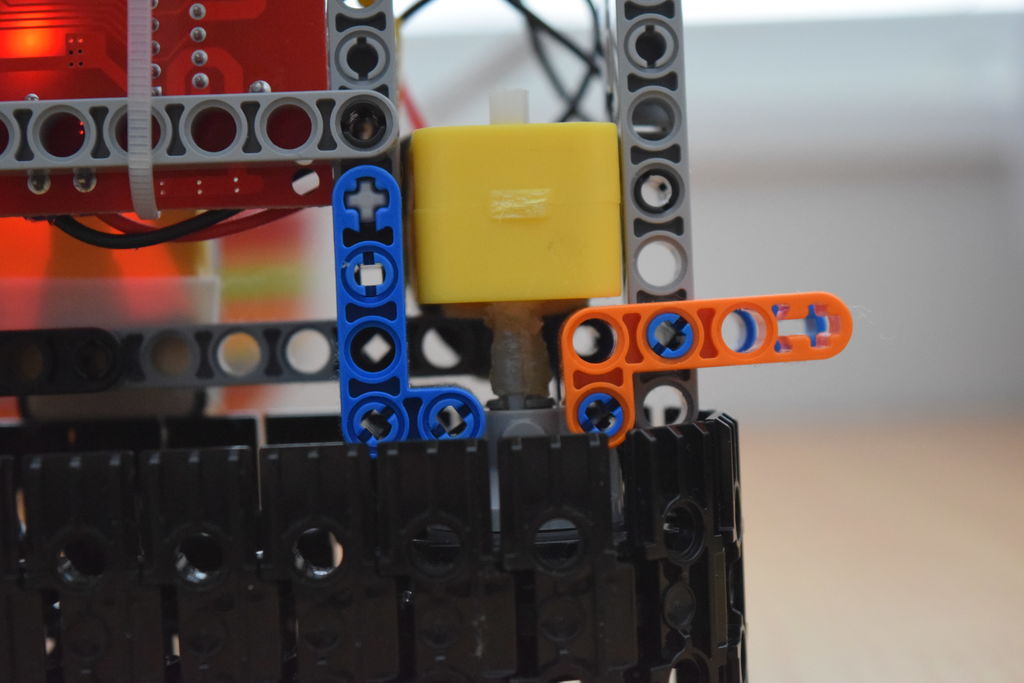
这里的轨道上的轮子有一个适合乐高十字轴的孔,所以请记住这是你的电机安装位置。
你需要足够的间隙在后面和前面跟踪。你可以在图2中注意到“L”的peices不是semetric,这是为了允许轨道空间。我最初让它们是semetric但是轨道一直在摩擦,并且在某一点上变得卡住并打破电机适配器。
一旦你有了车轴,你就可以然后定期使用长位和交叉支撑连接
。确保您将交叉支撑放在一起,以便组件适合它们之间,这有助于保持低调。
长度将取决于您拥有多少轨道。这条赛道没有拉伸,所以需要一点松弛。如果你有橡胶履带,你可以使它更紧凑。另外一个跑步轮是一个不错的主意,但总体上不需要。
这一步很简单直接,只是涉及一些试验和错误。
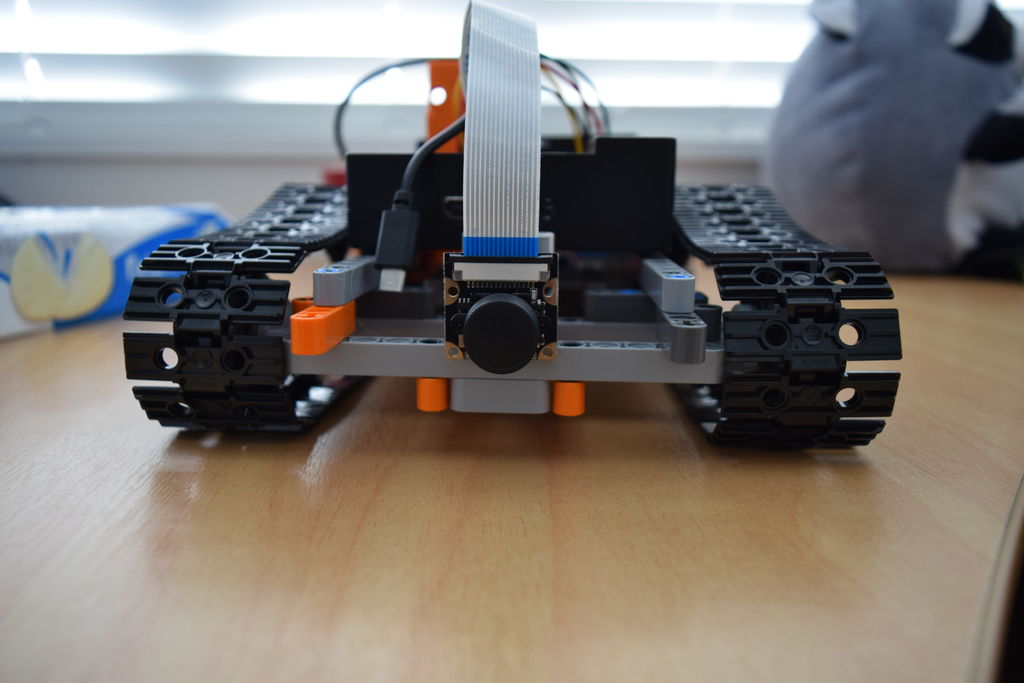
电机基本上都粘有双面泡棉胶带,因此可以粘住它们的大面积。
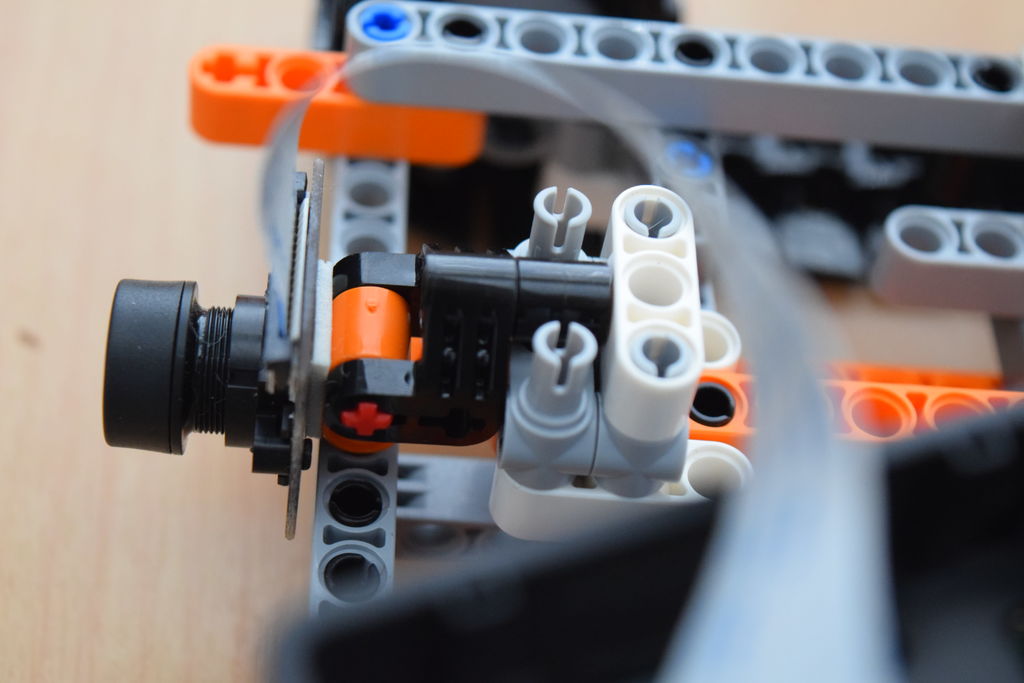
我制作的相机底座相当垃圾,你应该尽量自己动手制作。我喜欢它,因为它看起来像你在相机上快速旅行。这将是一个很酷的地方,用伺服或两个伺服升级,使摄像机可以移动。
希望这些笔记很有帮助。我在编写instructable之前构建了这个东西,并且有点犹豫,因为它现在已经分开了。我真的相信可以做出更好的设计,所以我认为你自己的发展会是最好的。如果您希望我将其作为完整指南,请发表评论,如果有足够的需求,我会这样做。
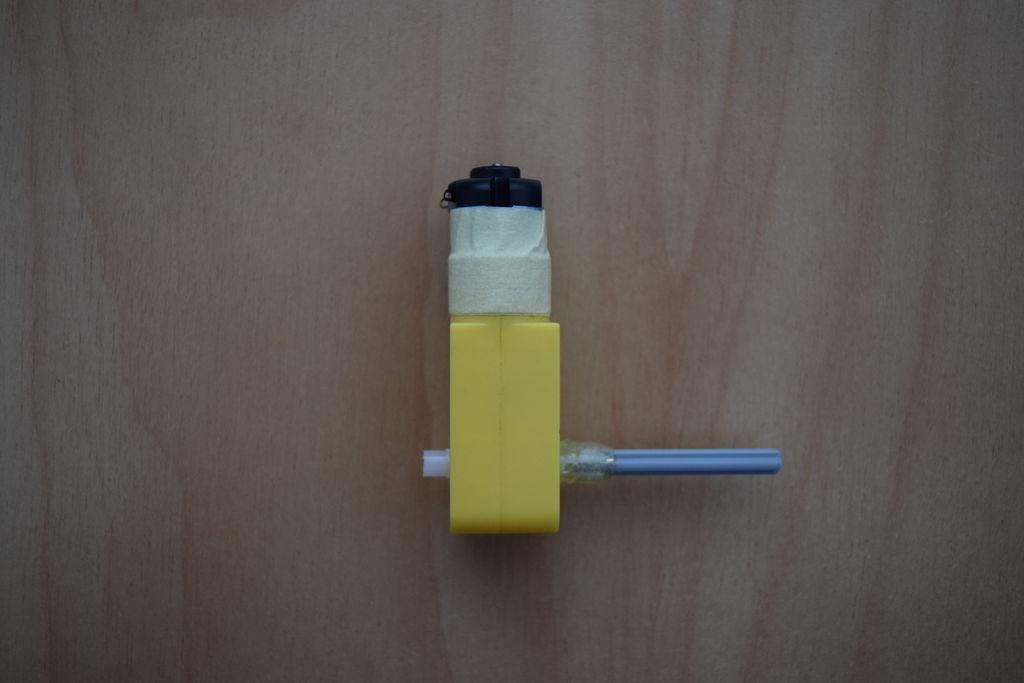
步骤2:直流变速箱电机到乐高适配器




再次,我在写作之前做了这个并没有拍任何照片。我认为有很多不同的教程可以做到这一点。 Adafruit实际上卖了一个适配器,这是最好的方法,再加上你不需要破坏你的电机支架。我在新西兰虽然Adafruit不可用,但DIY是:-)。这就是我所做的(对不好的图表感到抱歉):
准备好所有工具,我们将切割塑料,所以这不会太难。我使用了一副车间眼镜,因为我个人讨厌整个眼球上的小塑料。我也使用了其中一块绿色砧板,所以我没有弄乱我的桌子。
因此图表显示了顶视图和侧视图。基本上,灰色是直流变速箱电机上的白色小部件,红色是我们切割的地方。顶视图上的红色实际上应该是乐高十字轴的横截面。我们将要移除那些材料,以便轴适合贴合内部。尝试将其切割成尽可能靠近中心,几乎直到底部。我首先用dremel上的圆锯片粗略地切割,然后用盒式刀具开始剃须,直到我完美贴合。
一旦你有一点切割,轴适合更多或者不那么直(它应该看起来像一个奇怪的折叠半叉)你可以环氧乐高十字轴。在你涂上任何环氧树脂前,确保你在电机的黄色外壳上涂上遮蔽胶带,这样你就不会将轴固定在表壳上。 将5分钟的环氧树脂混合均匀,并在白色钻头和横轴上涂上厚厚的一层,我们正在寻找1-2毫米厚的涂层。 5分钟的环氧树脂变得很粘,很快就无法使用,所以在这里工作很快。
一旦涂上了大量涂层并且环氧树脂没有运行,你应该完成。它确实运行了一点所以要小心。一旦它被设置成橡胶般的稠度,你就可以轻松地去除任何多余的环氧树脂,这就是我在我的上面得到一个漂亮的扁平端。
让它干燥过夜,你应该有一个乐高直流变速箱早上的电机
第3步:连接起来

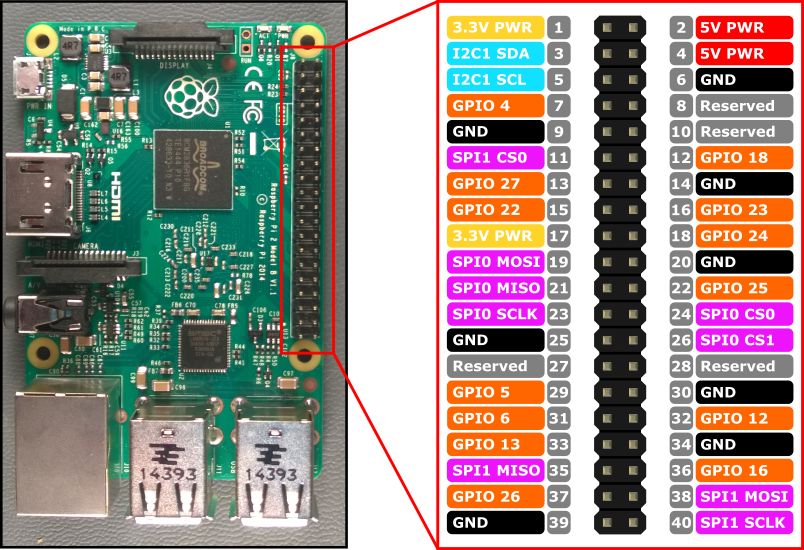


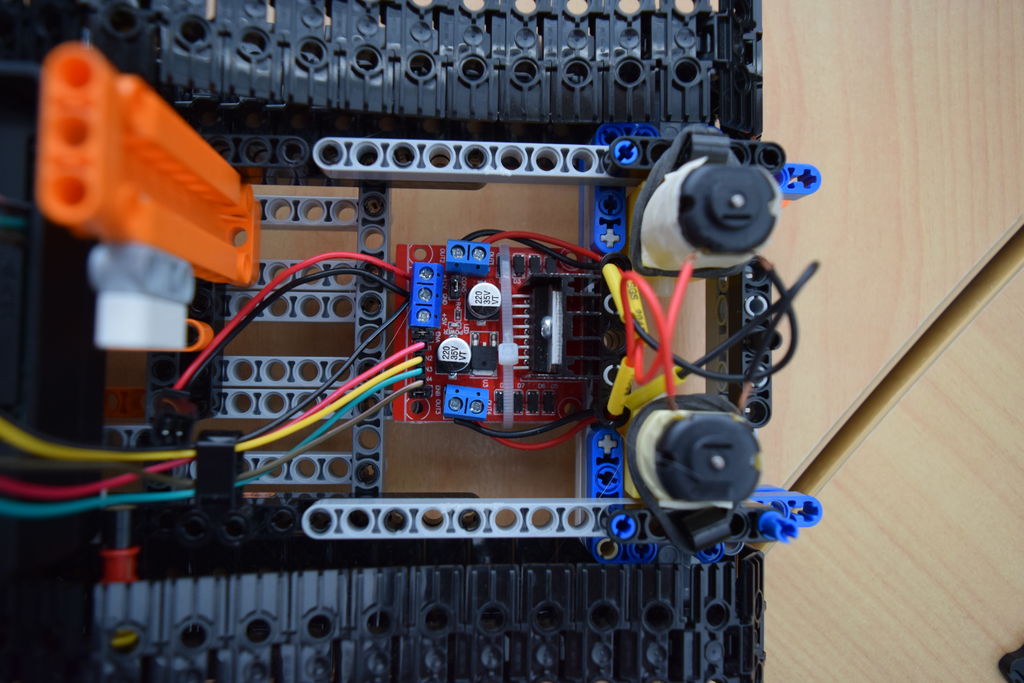
此项目的接线非常简单。我们将使用4对母对母跳线将我们的GPIO引脚连接到L298N电机控制器和公对母跨接电缆,将Raspi 3的接地连接到L298N电机控制器的接地。我们还将使用一些电线将电机连接到L298N电机控制器。
我选择在Raspi上使用这种引脚组合,因为它们聚集在一起。尽管如此,请随意使用任何一组GPIO引脚和GND。请记住在代码中更改它。
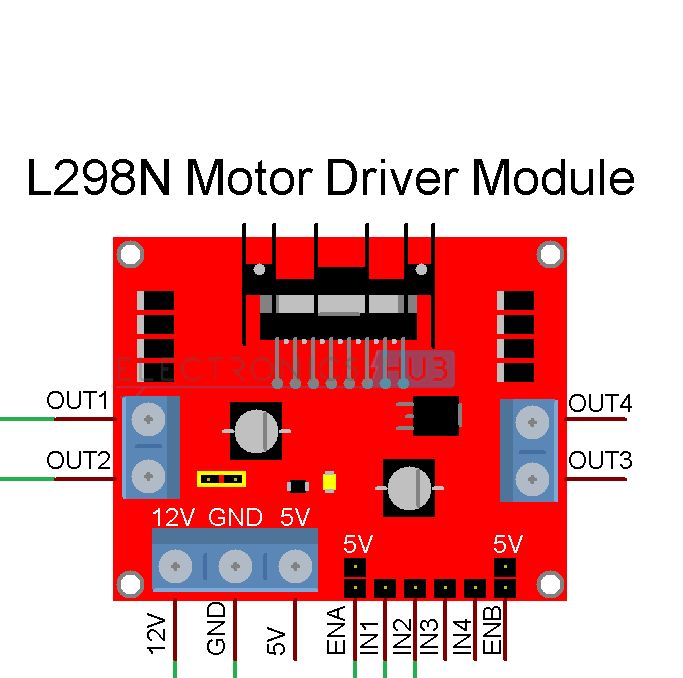
您可以使用接线图或按照以下步骤操作:
Raspi 3 - 》 L298N
GND (引脚14) - 》 GND
GPIO27(引脚13) - 》 IN1
GPIO22(引脚15) - 》 IN2
GPIO23(引脚16) - 》 IN3
GPIO24(引脚18) - 》 IN4
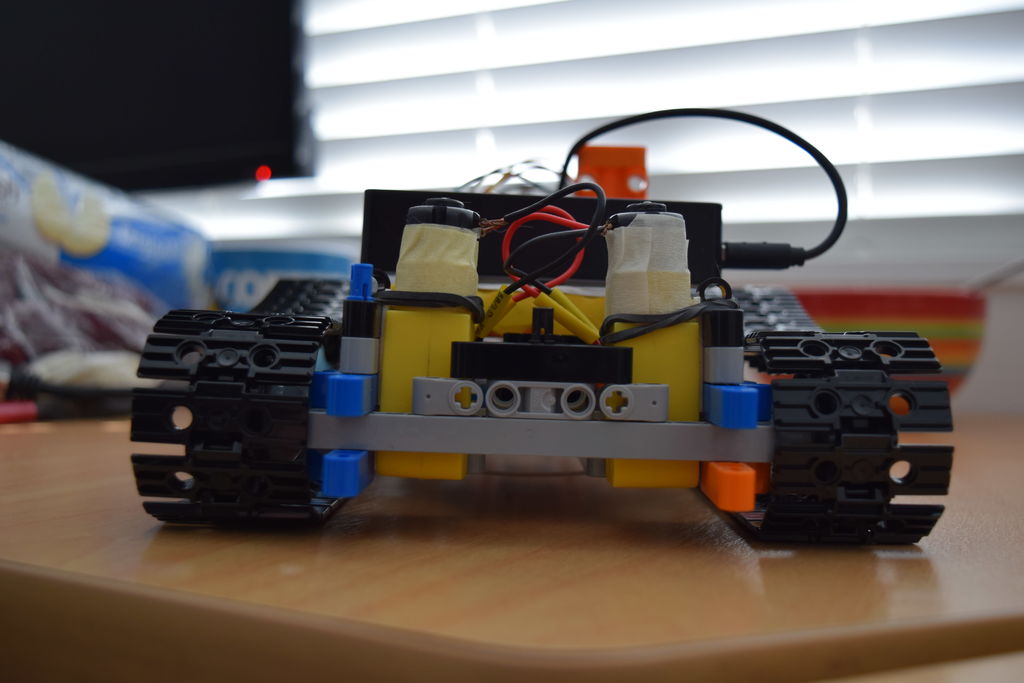
对于电机及其安装方式,我将它们连接起来。
Out2,Out3 - 》负
Out1,Out4 - 》正面
基本上是负面的,而正面则是前锋。如果你在另一个方向得到它们,那么坦克就会向相反方向驱动,这很容易用软件来修复。
第4步:编程
因此,对于这一步,我们需要设置一些内容,如果你还没有。
Raspian
Python 2或3
Git
MJPG-Streamer
安装Raspian
首先我们需要在micro SD卡上安装Raspian,所以准备好了至少8GB的格式化SD(如果你只有4GB卡,也可以安装NOOBS lite) 。
要安装Raspian,我建议使用NOOBS。官方链接在这里。将zip文件下载到PC上,然后将文件解压缩到SD卡中。确保文件和文件夹在那里,而不是在noobs文件夹中。
完成此操作后,将SD卡插入Raspi 3,连接屏幕(如果没有显示器,可以使用HDMI的电视机正常工作)和键盘和鼠标。
你应该看到安装屏幕加载,连接到wifi(这个项目需要wifi工作)和安装,我只是使用默认设置,因为它们运作良好。
配置无头模式
因此,一旦安装了Raspian并且您登录到Raspi 3,您就可以开始配置Raspi 3以无头模式运行(即使用SSH而不是屏幕和键盘)。只需注意您将需要使用sudo ,因此请确保您知道root密码。
打开一个终端并输入‘sudo raspi-config’,你应该有一个像图像一样的蓝色和灰色屏幕。转到‘接口选项’,按回车键,然后转到‘P2 SSH’按回车键再次输入‘是’,再次输入‘ok’。
现在回到‘接口选项’并启用相机。
返回菜单,按右键然后输入以选择‘完成’。
接下来我们需要找到我们的IP地址,您可以通过在终端中键入“ifconfig”来完成此操作。找到以wlan0开头的块(通常是最后一个)并记下您的IP地址。它应该在第二行,看起来像192.168.1.XX,如果你正在使用你的家庭wifi。
很棒,这是配置的结束
安装其他软件
因此,要运行我的脚本,您需要安装python 2或3。如果你想学习python,我建议学习python 3,差异很小但是python 3现在被广泛使用。它应该预装Raspian但我们应该仔细检查。
输入‘python --version’,你应该得到像‘Python 2.7.13’这样的输出,这意味着你已经安装了python 2。要检查你是否有python 3只需输入‘python3 --version’,你应该得到类似的输出。如果你没有python 2或3,你可以分别输入‘sudo apt-get install python’或‘sudo apt-get install python3’。
您还需要Git来获取代码,同样,它应该预先安装。如果你没有,请输入‘git --version’来检查并使用‘sudo apt-get install git’。
安装MJPG-Streamer
MJPG-Streamer是我访问Picamera的方式之一。它允许您通过浏览器访问相机并操纵图像。如果您对代码感到不舒服,这可能是使用相机的更好,更简单的方法。
我们再次使用Git。在Raspi 3终端输入‘git clone https://github.com/jacksonliam/mjpg-streamer.git’。该软件将被下载,不会花费太长时间。
此时可能最好的做法是查看‘README.md’文件并按照安装说明进行操作。他们为我无缝地工作。如果您有任何疑问,请将其留在评论中,我会尽力帮助
安装完成后即可运行。我将在下面介绍我如何做到这一点。
全部放在一起
太好了,现在我们应该准备好了。确保Raspi 3已打开电源。在你的PC/笔记本电脑上,打开一个终端(我假设你正在使用linux或Mac,如果使用Windows你必须下载putty。网上有很多关于如何使用它的教程,不用担心,这很容易)并输入‘ssh pi@192.168.1.XX(假设您没有更改默认用户名)或者您之前找到的IP地址。输入您的密码(这绝对不是默认密码)。太棒了,现在您通过PC/笔记本电脑在Raspi 3上进行终端会议。
因此,在终端类型’git clone https://github.com/astrobenhart/Raspi-3-FPV-Lego-T 。..这应该只需要几秒钟,因为文件非常小。然后你可以使用‘cd Raspi-3-FPV-Lego-Tank’导航到目录,现在键入‘ls’并确保你看到这5个文件:‘demo.py’,‘drive.py’,‘Picamera_tank。 py,’finished.jpg‘和’README.md‘。确保你查看任何更新的自述文件。
demo.py
这个py脚本非常适合测试你的布线是否正常工作。它只是通过向后和向前驱动电机的不同组合。
使用’python demo.py‘运行。大约需要半分钟左右才能完成。
drive.py
这是您将运行以控制坦克的py脚本。它设置GPIO引脚映射并创建用于移动的defs。它还捕获按键以控制油箱。
使用’python drive.py‘运行。给它一秒钟,你的终端应该是空白的。
使用’w,a,s,d‘移动和空格键停止。当您准备关闭程序时,请按’n‘。
Picamera_tank.py
这是我的相机流光版本。这只能用python 3运行(即使用’python3 Picamera_tank.py‘运行)。这可以在第二个终端窗口中运行,或者您可以按ctrl-z并键入bg以在同一终端的后台运行它。我个人喜欢使用单独的终端。
你不必安装任何额外的东西,但如果你确实使用了pip。如果您遇到任何问题,请发表评论。
一旦在Raspi 3上运行,请登录PC/笔记本电脑的浏览器并转到192.168.1.XX:8000(IP我们发现早些时候)。你应该看到相机输出。如果需要旋转图像,则需要编辑py脚本。靠近底部是注释,下面输入您需要的旋转度。对我来说这是180,因为我的相机是颠倒的。
运行MJPG-Streamer
要运行MJPG-Streamer,我导航到’mjpg-streamer/mjpg-streamer-experimental‘并运行’。/mjpg_streamer -o “output_http.so -w 。/www”-i“input_raspicam.so -hf”‘。
一旦运行,请转到192.168.1.XX:8080(我们之前找到的IP)并单击在流媒体上。使用其他选项,它们可能对您有用。
就是这样。你现在应该可以驾驶你自己的FPV坦克到你可以获得无线网络的地方。玩得开心。
- 相关推荐
- 热点推荐
- 树莓派
-
宏集方案 | 如何用工业树莓派和MQTT平台打通OT和IT?2024-01-05 1297
-
树莓派机器人船构建2023-07-10 997
-
树莓派4乐高案例2022-11-25 569
-
如何利用树莓派构建一个跟随机器人2022-11-24 3673
-
如何使用树莓派制作一个巡线机器人2022-04-08 8122
-
如何用树莓派自制一个婴儿监视器2019-04-10 4598
-
树莓派可发射“炮弹”和实时视频的超级坦克(上)2016-01-15 9770
-
用乐高积木为树莓派搭一个“家”2015-12-25 8333
-
用树莓派看电影2015-11-30 1194
-
DIY一个树莓派扩展板2015-08-04 8646
-
用笔记本控制运行树莓派坦克车 相当好玩2014-09-12 10811
-
变形乐高玩具变形和树莓派一起玩出乐高机器人!2014-09-02 11958
-
树莓派的神奇 超乎你想象2014-08-08 4516
-
地球已经阻止不了树莓派!!!2014-07-08 20196
全部0条评论

快来发表一下你的评论吧 !
