

球平衡PID系统的制作
电子说
描述
第1步:PCB
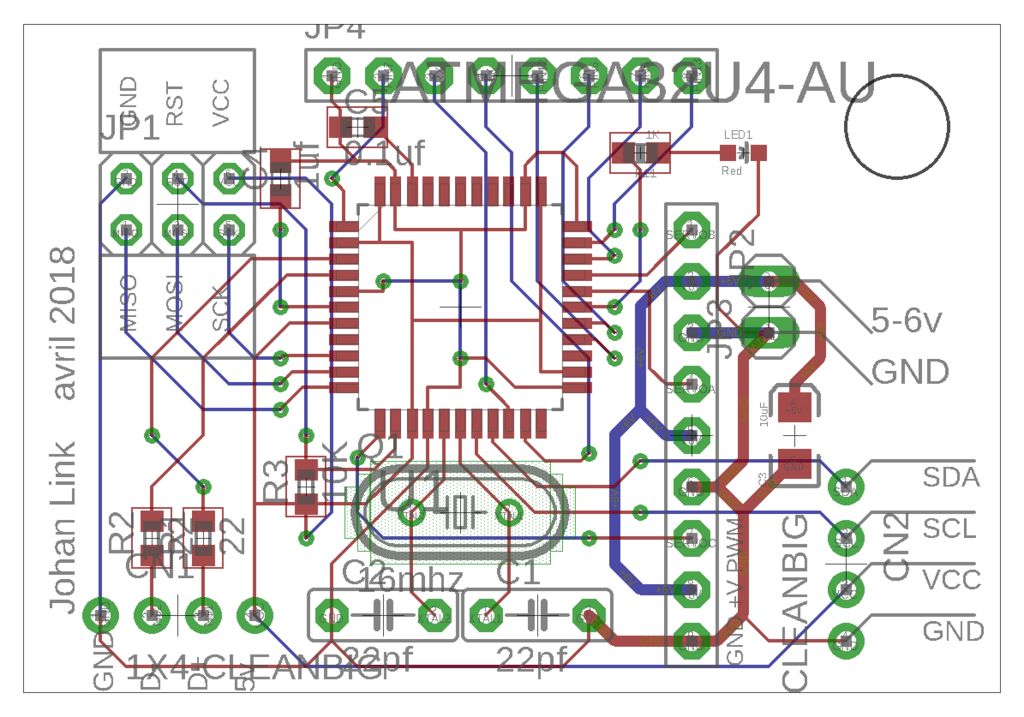
PCB制造
我用 eagle 绘制了pcb,然后PCBWay.com制造了它。
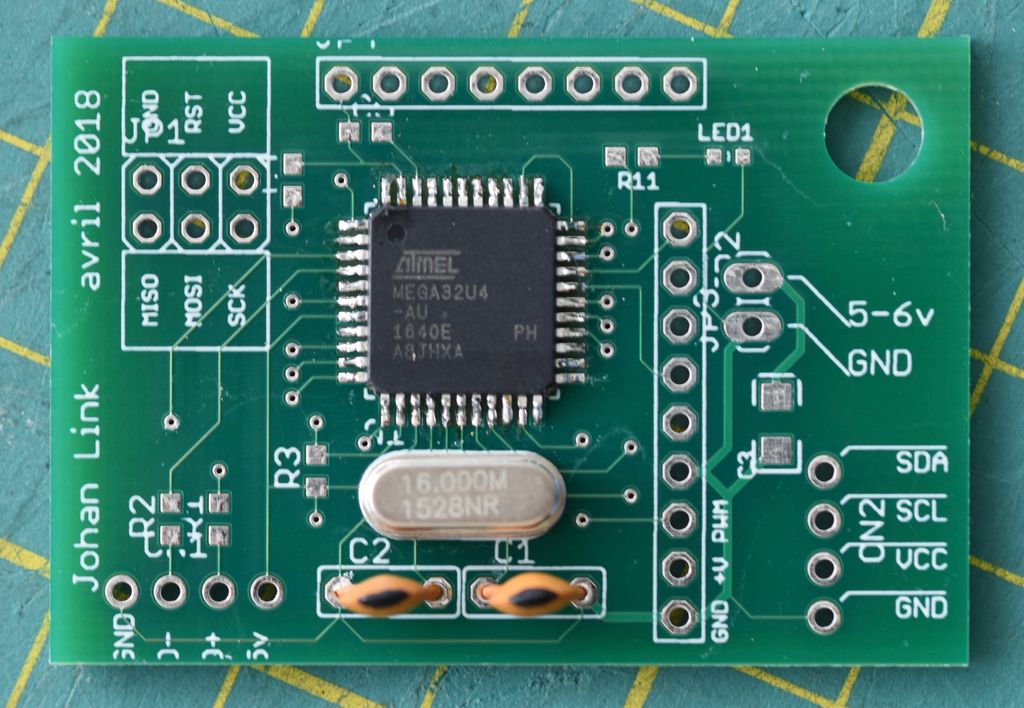
PCB组装:
我焊接了所有没有焊剂助焊剂的smd组件。我不建议你像我这样做。
PCB采用5-6v 2A电源供电。
PCB组件:
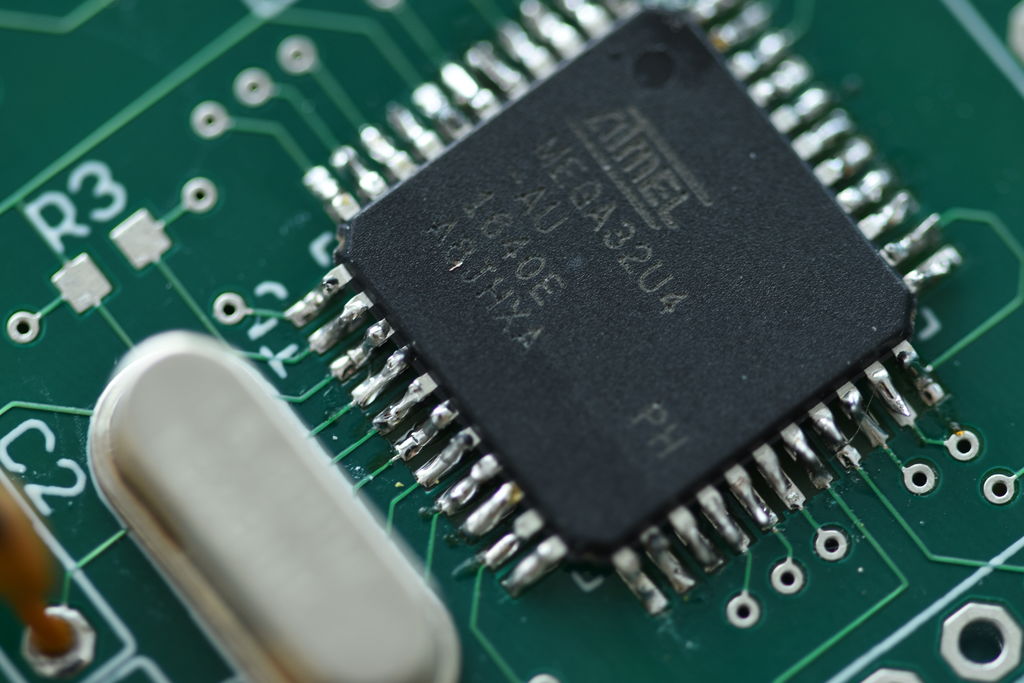
1X Atmega32u4
1X 1uf电容器
1X 0.1uf电容器
1X 10uf电容器
2X 22pf电容器
1X led
1X 10K电阻器
1X 1K电阻器
2X 22电阻器
1X 16mhz Quartz
usb connecto r
power jack
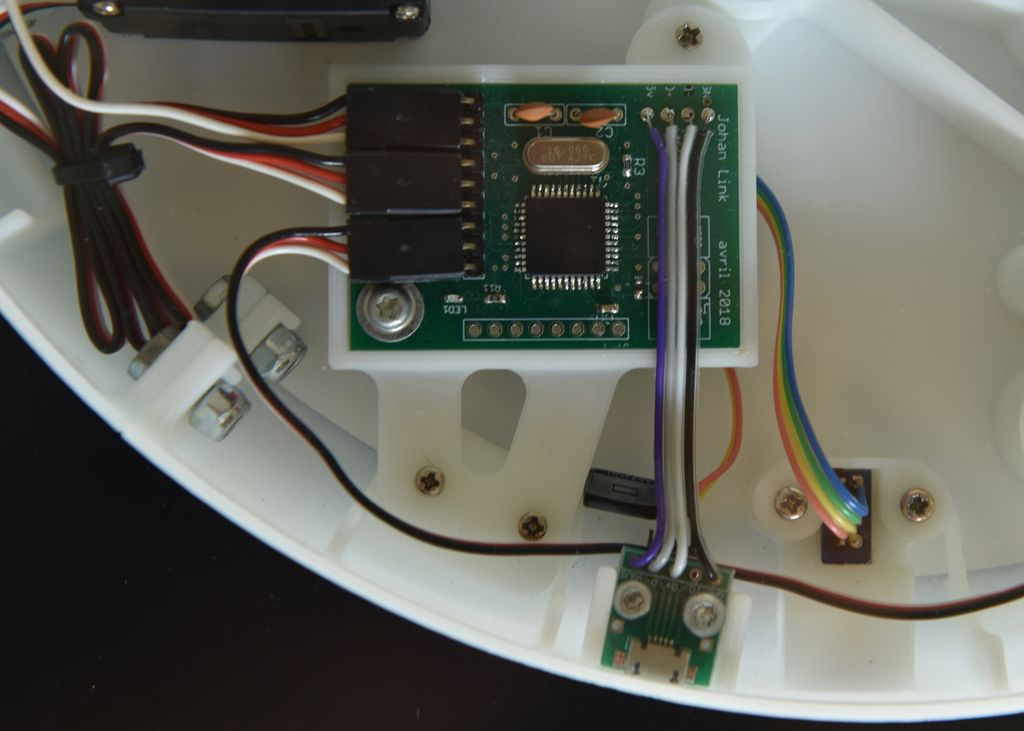
PCB的角色
PCB连续与计算机通信。该PCB仅用于控制伺服电机。
步骤2:3D打印
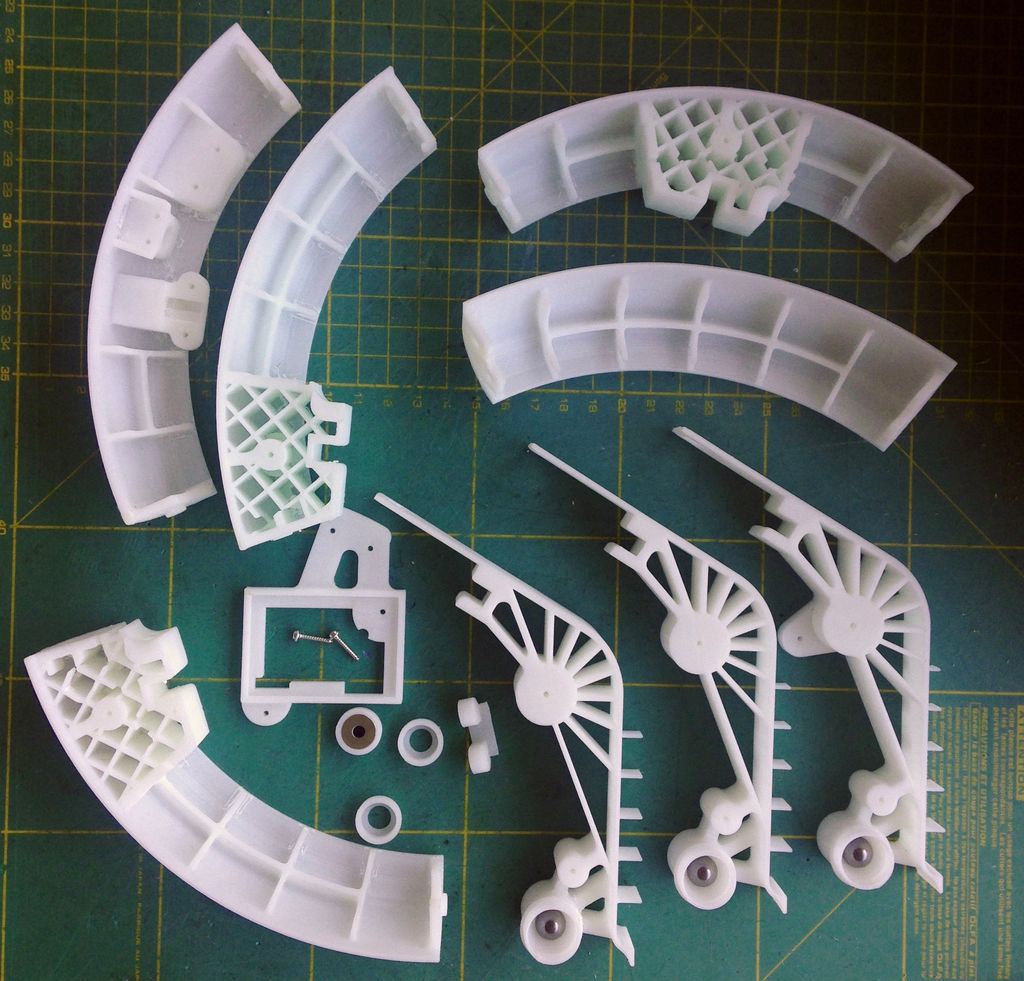
警告: inferieur.stl , superieur.stl 和 plateau.stl 文件不是3D可打印的。 inferieur.stl和superieur.stl由丙烯酸制成。您可以使用CNC制造这些零件,但您也可以在亚克力板上自行切割,因为这些零件的设计并不复杂。 plateau.stl 可以用纸板切割。
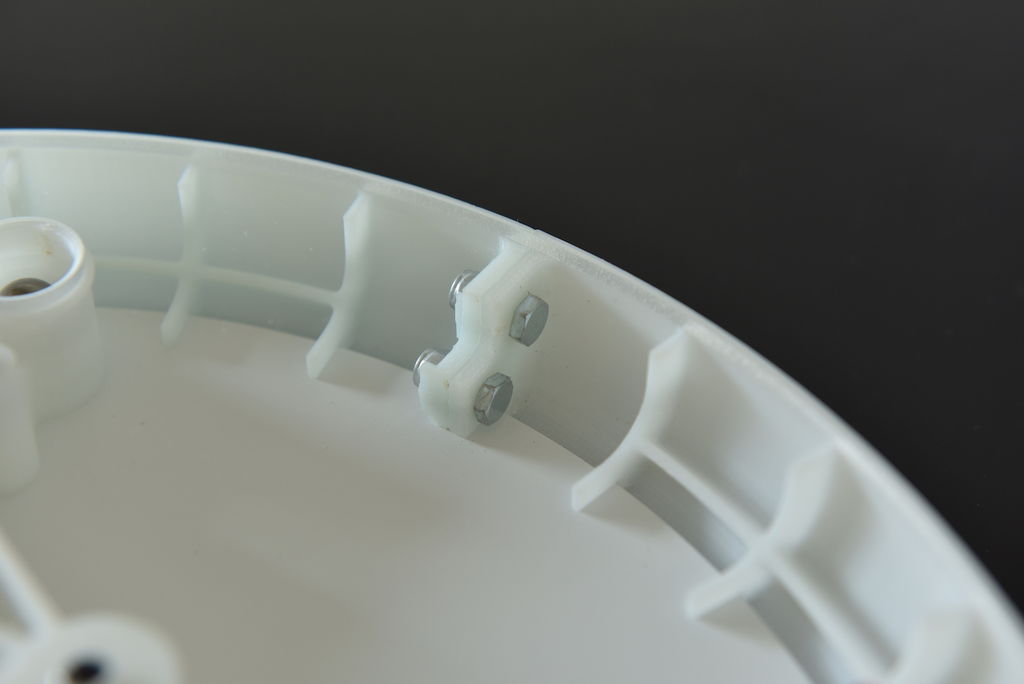
第3步:零件装配
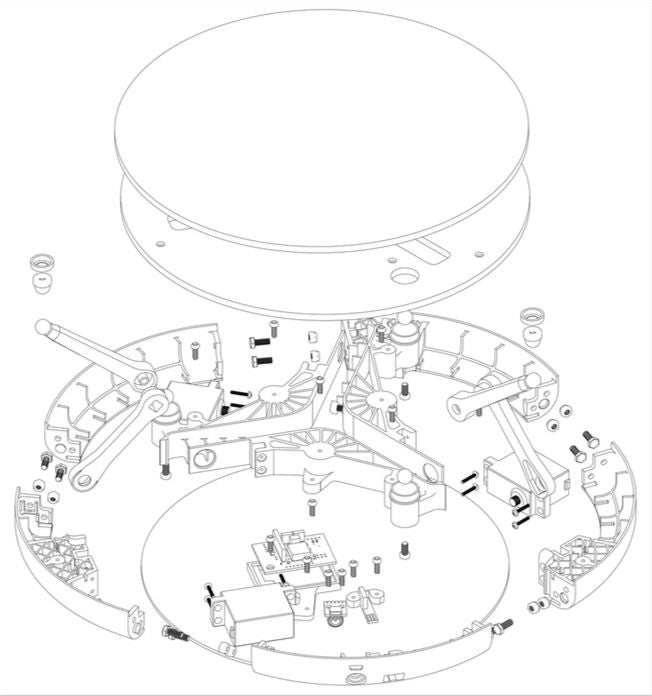



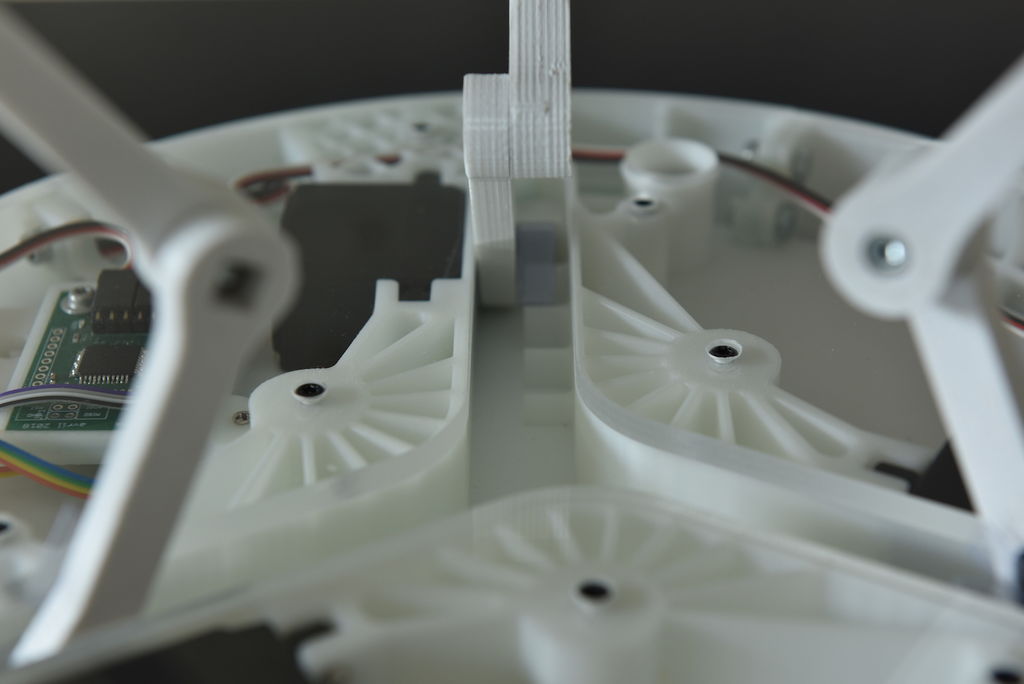
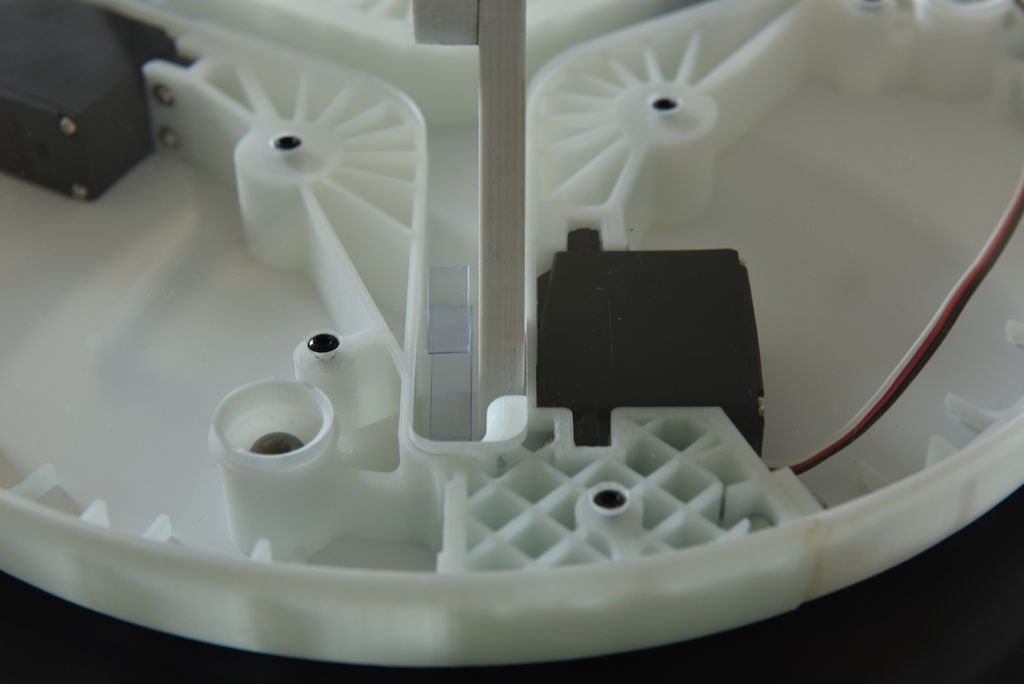




机械部件:
Futaba伺服s3003
磁铁和球
13X M4 * 10mm螺栓
10X M4螺母
15X
3X M4 * 10mm螺栓
3X M4螺母
USB网络摄像头
铝管:长474毫米,直径8毫米
步骤4:PCB编程
PCB包含与arduino leonardo相同的微控制器。因此可以使用Arduino软件进行编程。代码可以在这里下载。
在编程PCB之前,你必须刻录引导加载程序:Arduino作为ISP和Arduino引导加载程序
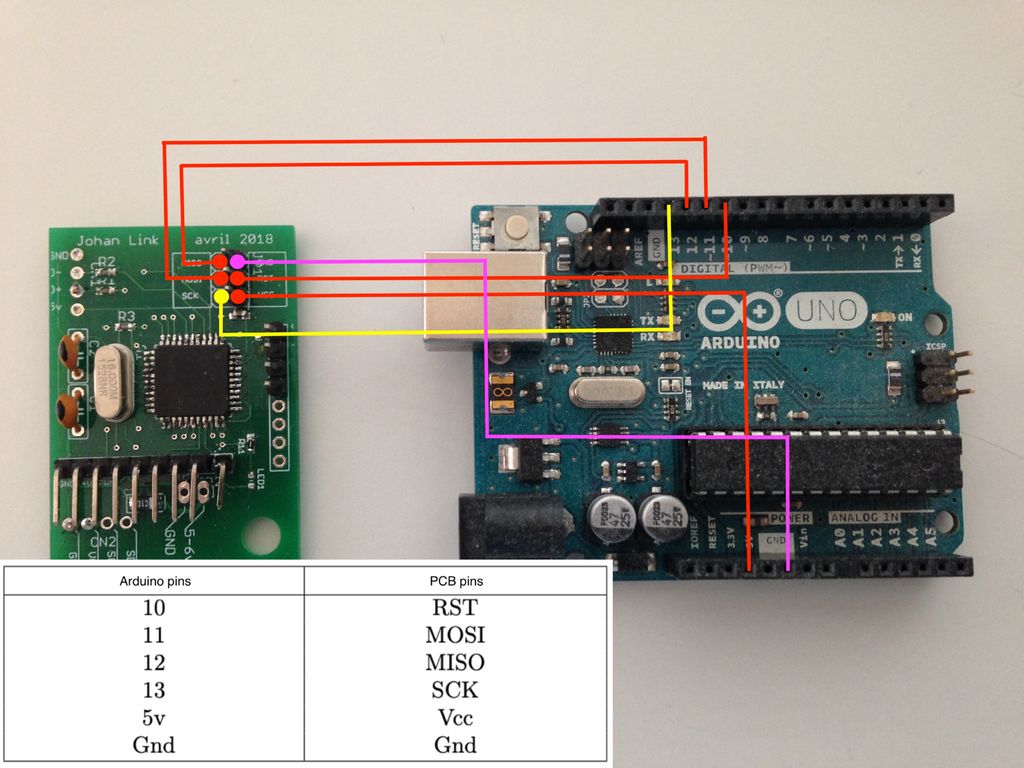
刻录引导加载程序
你需要一个Arduino
将ArduinoISP草图(arduino软件/例子/ArduinoISP)上传到你的Arduino板上
如图所示进行连接
从工具》主板菜单中选择“Arduino Leonardo”。
从工具》程序员
选择“Arduino as ISP”
运行工具》刻录引导程序
此过程可能需要几分钟。
断开所有电缆。
完成此步骤后,您必须使用USB电缆将pcb连接到计算机并上传此代码。
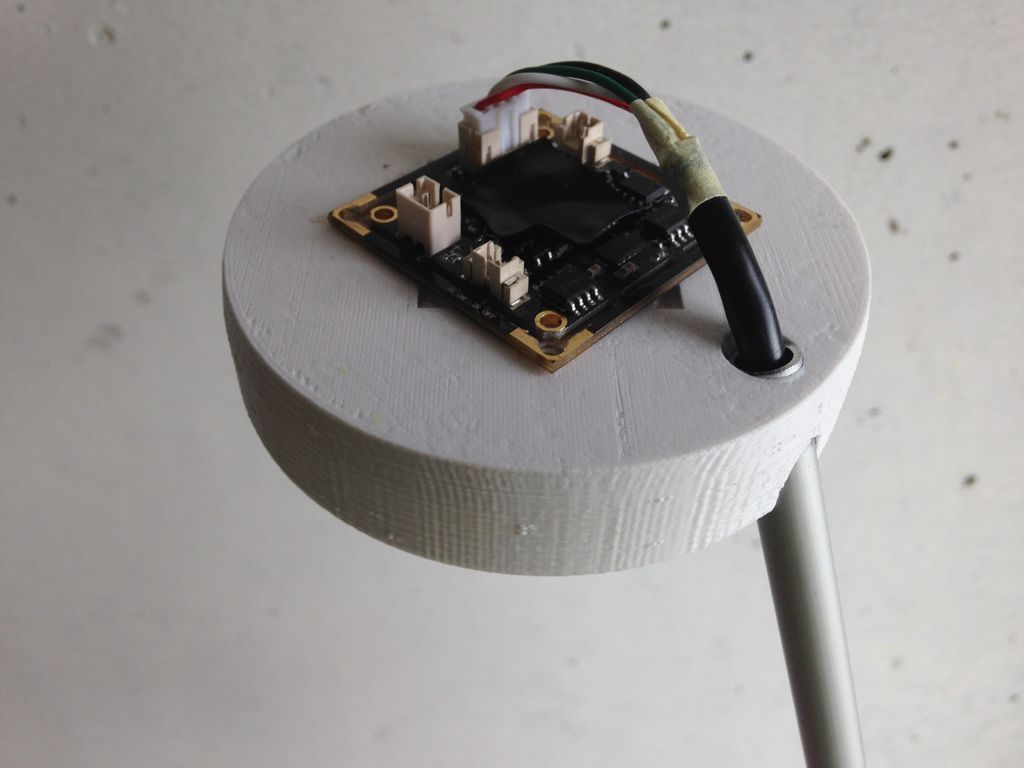
步骤5: Python程序

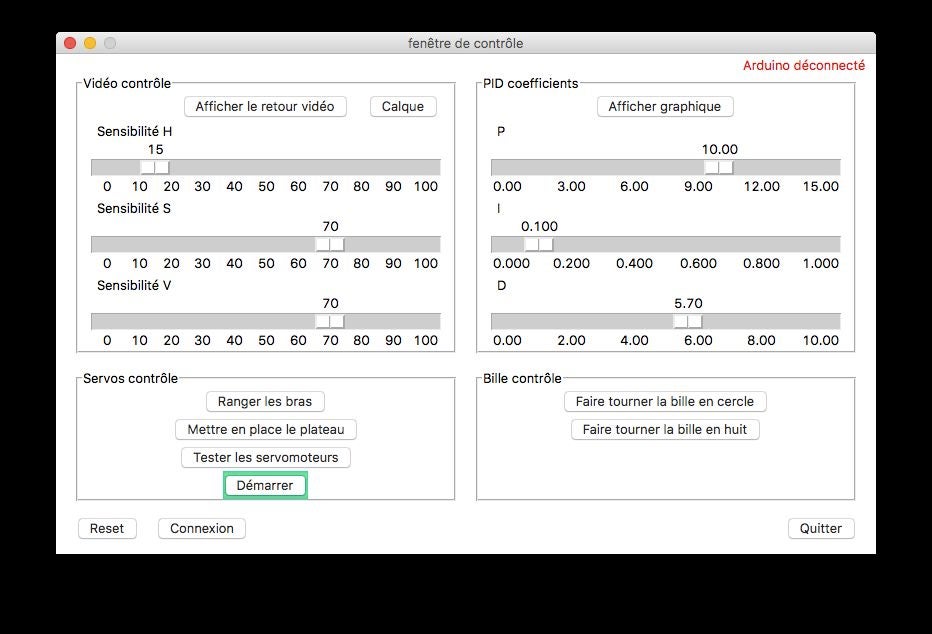

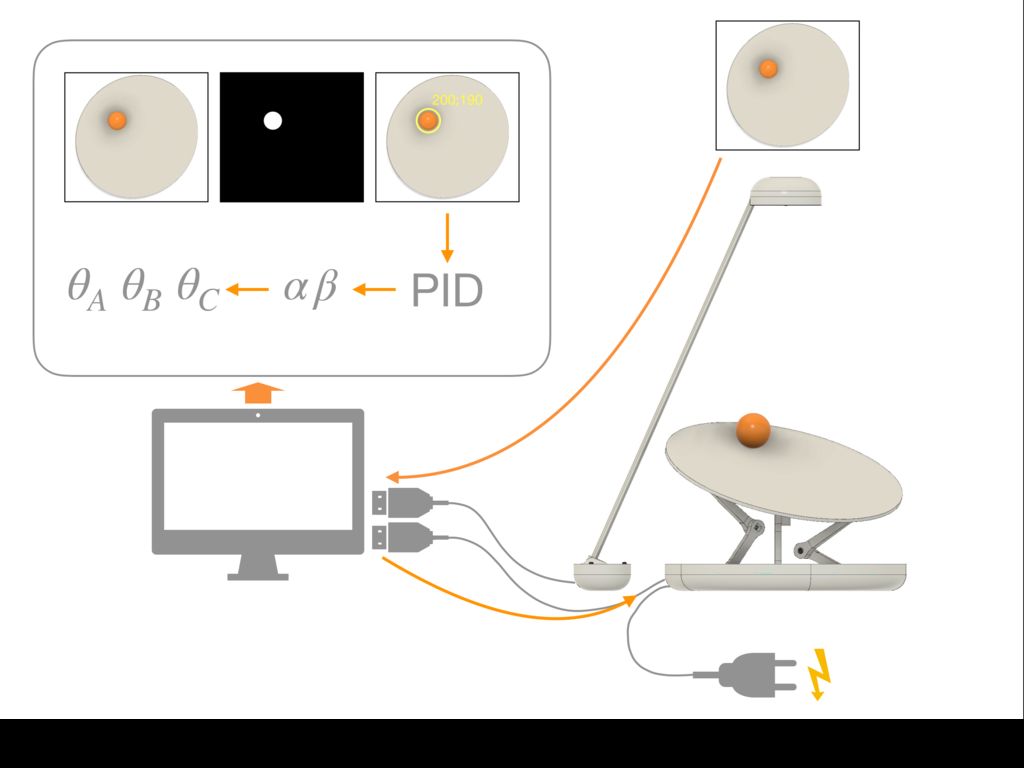

最重要的代码是在控制系统的计算机中。你可以在这里找到代码。
如何运作。第一步是找到球的位置。相机发送计算机实时视频。 python程序接收视频并且必须处理它。我使用OpenCV库来进行图像处理。该程序由于其颜色而检测到球。这里球是橙色的,然后程序将平均图像的所有橙色像素的位置以找到球的位置。
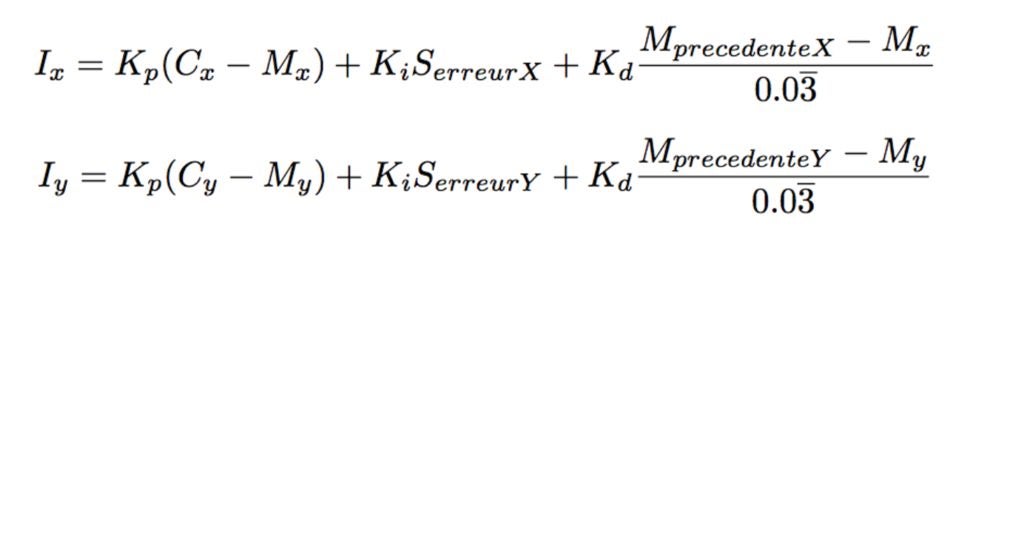
现在我们可以获得球位置了用PID(比例,积分和微分)控制计算电路板的倾斜度。该规定分三个阶段进行。第一步是最简单的。想象一下,我们想要将球稳定在棋盘中央。球离中心越远,就越需要倾斜球板。然后你必须测量球的速度:球离开中心的速度越快,你就越需要倾斜棋盘。
-
平衡小车与电机PID系列教程2023-07-31 685
-
使用PID控制的自平衡球2022-12-28 887
-
PCB制作的新年LED球2022-07-19 798
-
平衡小车+pid上位机移植2022-01-14 1014
-
手动调整平衡小车的PID简介2022-01-05 1583
-
树莓派平衡小车仿真、设计与制作的相关资料分享2021-08-30 1442
-
怎样去制作一种球上自平衡机器人2021-08-17 1565
-
如何制作PID控制的球平衡Stewart平台2019-11-12 4069
-
【Intel Edison申请】基于Intel Edison开发板的3D打印机器人+PID平衡球控制2016-07-13 3686
-
平衡球释放器及使用2010-09-14 503
-
气动柔性球关节的模糊PID控制2009-08-08 2994
全部0条评论

快来发表一下你的评论吧 !
