

如何将RPLIDAR与arduino一起使用
电子说
描述
第1步:LIDAR是什么?

维基百科对LIDAR有两种不同的含义:
- 光检测和测距
- 激光成像检测和测距
一般来说,它可以看作旋转的距离传感器base,在连续旋转时对范围数据进行采样。对于每个成功的样本,测量的距离以相应的角度发送。
在这种情况下,数据通过UART发送。
步骤2:使用Arduino与LIDAR接口
LIDAR需要连接到Arduino的硬件串行端口(UART),对于基本的arduino,这意味着你不能将任何UART数据发送到串行控制台。因为它们只有一个串口。对于只有1个硬件串口的基本Arduino,您可以添加额外的软件串口。将在此instructable中使用的库不支持软件串行端口(在编写本文时)。
因此,如果您希望能够将发送串行数据发送到串行控制台调试目的你需要一个带有多个串口的arduino。就像有:Arduino Mega,Arduino M0/Zero(SAMD21)。
如果您不需要将数据发送到计算机进行调试,您可以选择任何arduino。
对于这个教练我是将使用基于SAMD21微控制器Arduino M0/Zero的更现代,更强大的arduino。
必要部分:
Arduino M0 ebay链接
面包板ebay链接
跳线ebay链接
5V电源ebay链接
24 Led ring ebay link
首先你需要从robopeak安装RPLIDAR库:
https://github.com/robopeak/rplidar_arduino,这个库提供了两个有关如何使用LIDAR的有趣例子。您可以在本文中找到有关如何在arduino IDE中安装库的更多信息:https://www.arduino.cc/en/Guide/Libraries
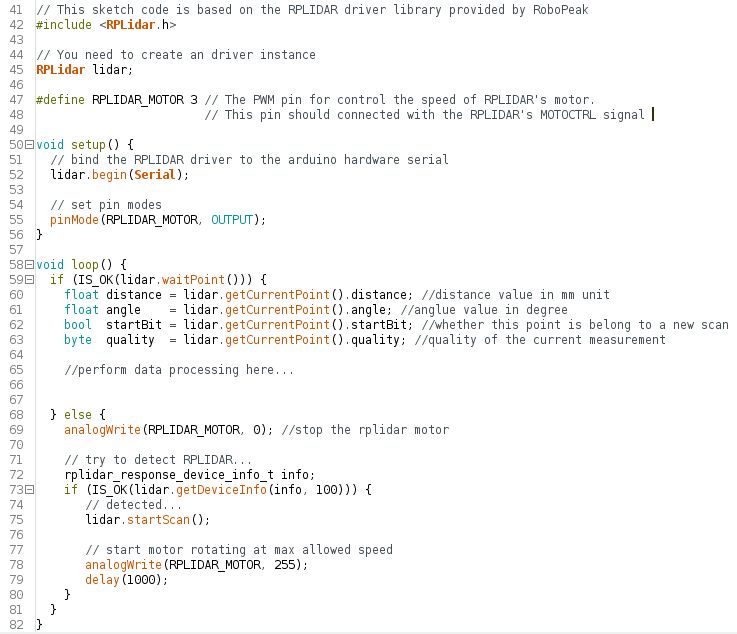
现在打开“simple_connect” “库中包含的示例代码。
从LIDAR到arduino进行必要的硬件连接:
- 将RPLIDAR的串行端口(RX/TX/GND)连接到Arduino板(引脚0和引脚1)
- 连接RPLIDAR的电机控制引脚连接到Arduino板引脚3
- 使用外部5V电源为电机控制引脚和激光雷达供电。
在虚拟设置中你将拥有更改以下代码:“lidar.begin(Serial);”根据使用的串口。使用Arduino M0时,应将“Serial”更改为“Serial1”。对于其他Arduino来说,这可能会有所不同。
第一张图是示例草图的样子,第60-63行包含可用于从LIDAR获取数据的变量名。
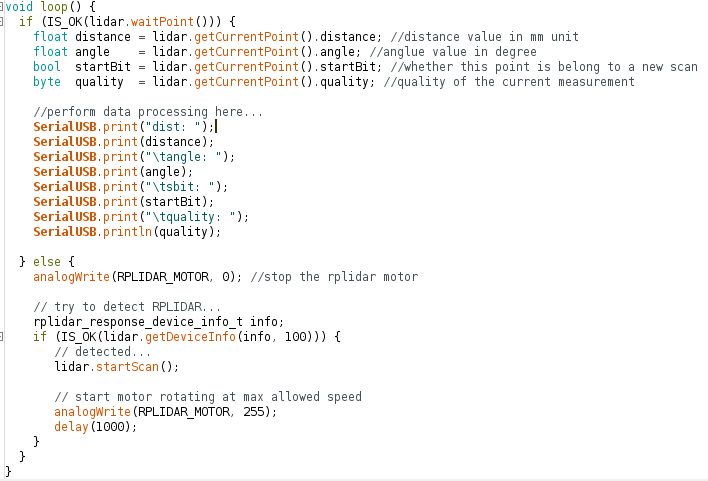
如果您想知道这些数据是什么样的,您可以将此数据打印到串行监视器,第二张图片中的代码。
在以下步骤中我们将用激光雷达和LED环做一个非常基础的工作项目。
步骤3:制作LIDAR LED环形项目








为此项目我们将在LIDAR上安装一个可寻址的led环。通过这种方式,我们可以可视化LIDAR数据。
在此特定程序中,LED将在最接近的检测信号的方向上打开。
此项目的代码基于其中一个示例来自robopeak:
https://github.com/robopeak/rplidar_arduino/tree/m 。..
此项目的更改代码包含在此步骤的zip文件中。
需要的零件:
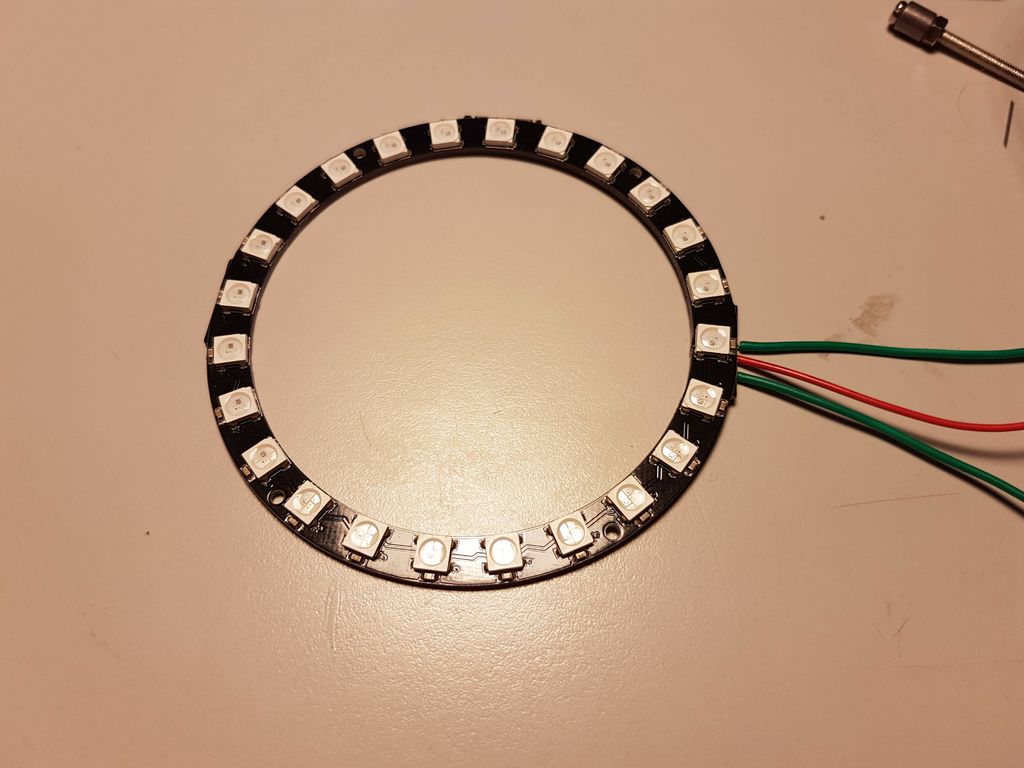
- LED环:24个LED大到足以装上激光雷达,内径70mm
- Arduino Zero
- LIDAR
- 独立5V电源
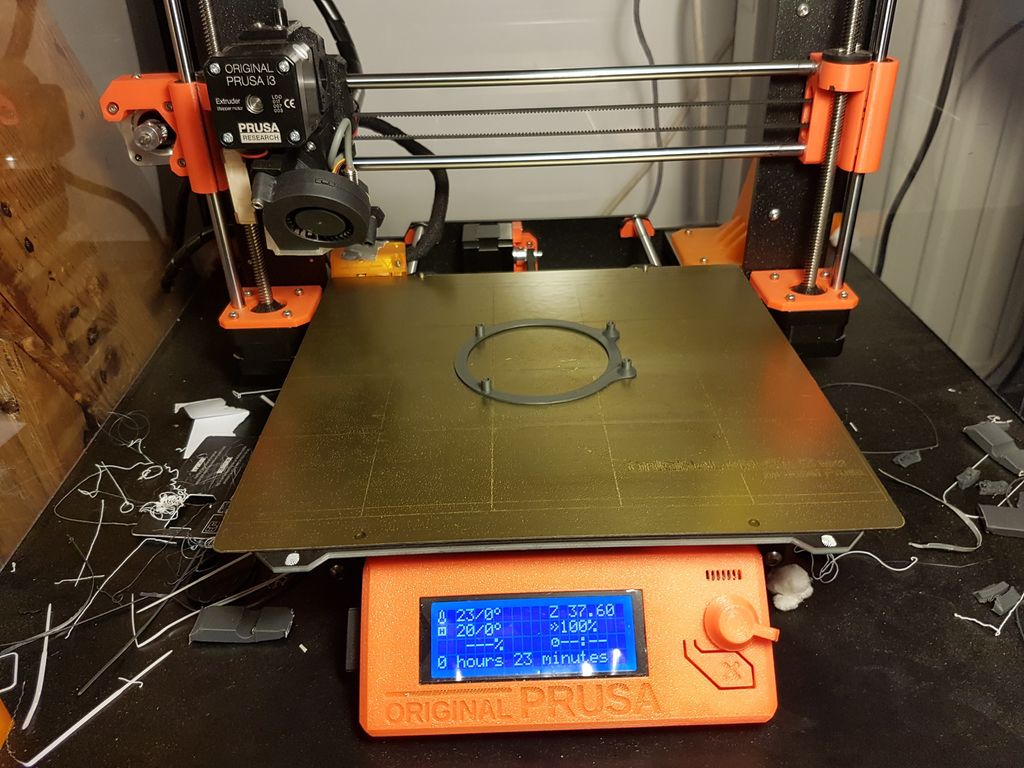
- 3D打印部件:https://www.thingiverse.com/thing:3181816
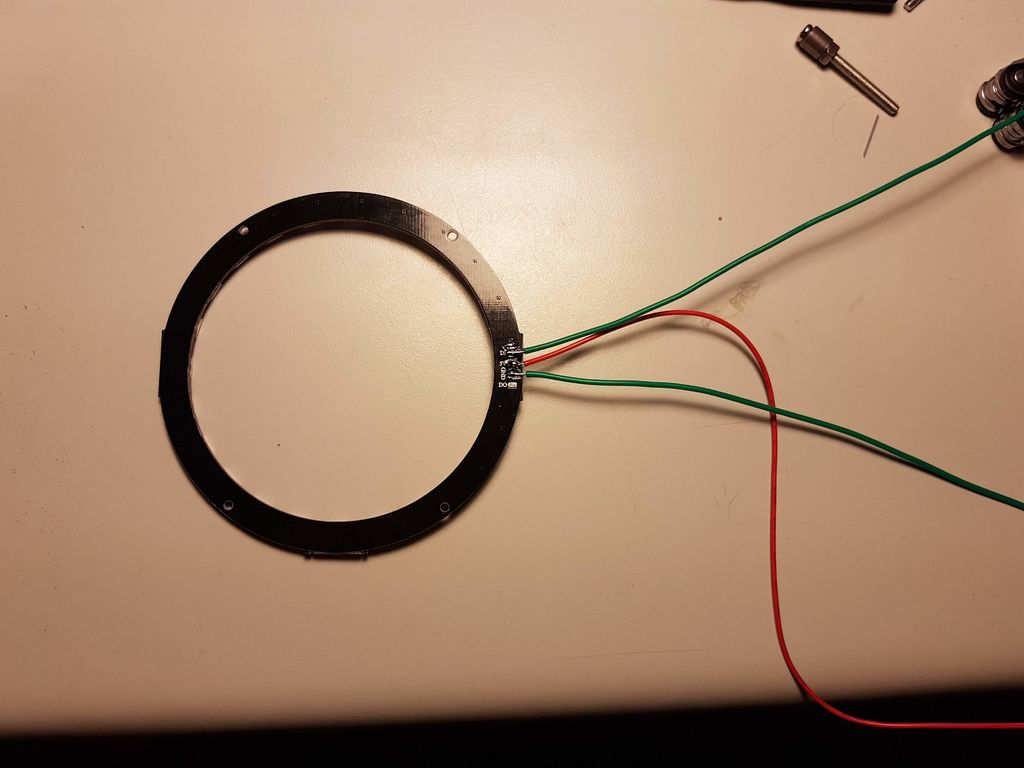
获取所有需要的部件
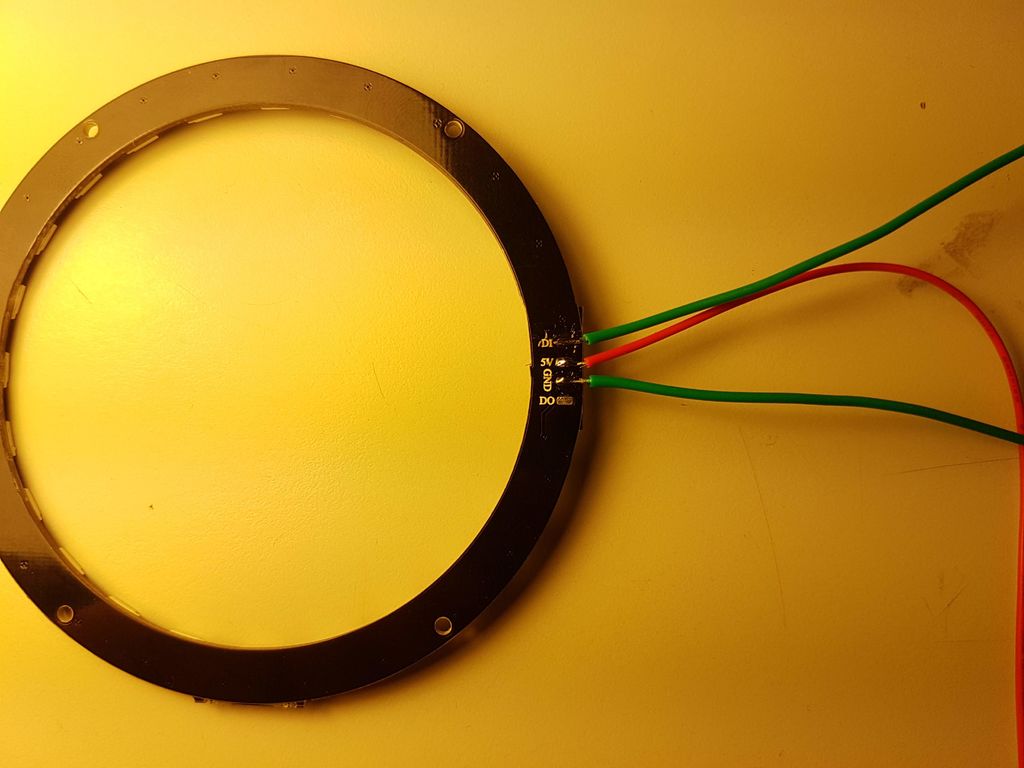
焊接连接到LED环的电线
将LED环粘贴到3d打印部件上
将3D打印部件安装到激光雷达上,3D打印部件上有用于M2.5螺钉的孔但是我没有把它们放在我刚刚使用的热胶上
将电线从LIDAR连接到arduino:
GND - 》 GND
5V - 》 5V的独立电源
迪 - 》 arduino的针脚D5
上传草图并打开外部电源
-
如何将atoi与esp8266 sdk一起使用?2024-07-09 416
-
如何将两个16*2 LCD与arduino连接在一起2023-06-30 567
-
如何将激光雷达传感器与Nucleo-64一起使用2023-06-16 931
-
将Arduino库与Raspberry Pi Pico C/C++ SDK一起使用2023-06-15 2034
-
将HC SR04与Arduino一起使用2023-01-04 737
-
将Pmod STEP与Arduino Uno一起使用2022-12-13 643
-
将Pmod KYPD和Pmod CLS与Arduino Uno一起使用2022-11-25 750
-
将Pmod DPOT与Arduino Uno一起使用2022-11-24 801
-
将Pmod CDC1与Arduino Uno一起使用2022-11-23 717
-
将Pmod ACL与Arduino Uno一起使用2022-11-21 739
-
将Pmod SD与Arduino Uno一起使用2022-11-17 568
-
与Arduino一起使用Relay2022-11-08 987
-
如何将指纹传感器与Arduino板一起使用2022-10-26 873
全部0条评论

快来发表一下你的评论吧 !
