

激光雕刻机DIY图解
电子说
描述
步骤1:所需的零件/材料和工具
2x - 旧DVD驱动器用于打捞步进电机机构。
1x - GRBL shield v4(也可以使用其他版本)。
2x - A4988步进电机驱动器。
1x - 250 mw 650 nm激光可调镜头
12v 2-2.5 Amps电源。
用于制作激光驱动电路的空白pcb。
男女标题。
1x - 47欧姆电阻。
1x-100k欧姆电阻器。
1x - 用于激光切换动作的IRFZ44N mosfet。
一些钕磁铁。
亚克力板。
M3螺钉和螺母。
激光防护眼镜。
1x - Arduino Nano。
工具要求:
钻孔机。
热胶枪。
锯切丙烯酸。
完成文件。
桌虎钳。
螺丝刀菲利普斯头和平头。
烙铁。
第2步:挽救步进机械和钕磁铁。
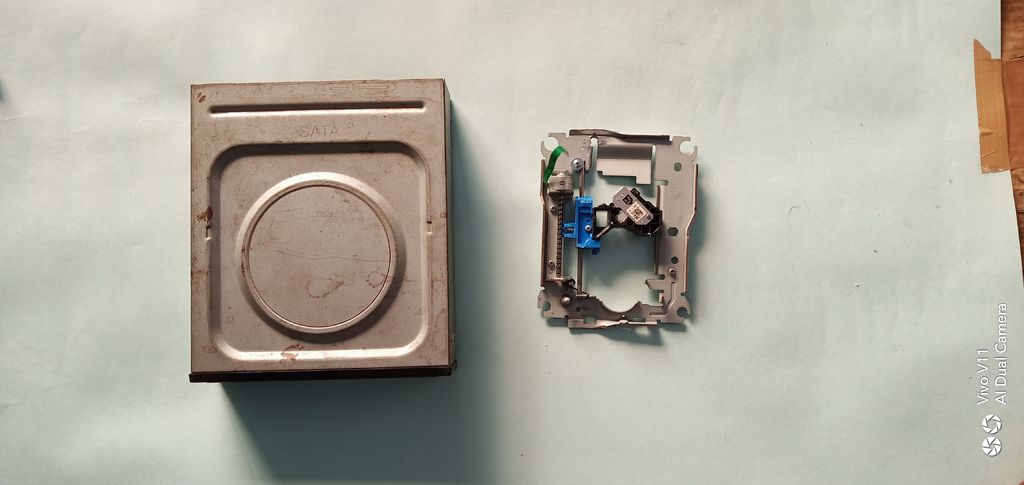
x轴和y轴分别需要两个步进机构,可以从两个使用过的DVD驱动器中回收。挽救步进机构和钕磁铁相当容易。您可以使用飞利浦头螺丝刀打开CD驱动程序轻松打捞。
确保在从DVD驱动器中挽救所需部件时不会损坏与项目相关的任何部件。
如果您不熟悉锄头这样做,我会留下一个链接YouTube视频,展示如何抢救各个部分。
步骤3:为机器制作基础。





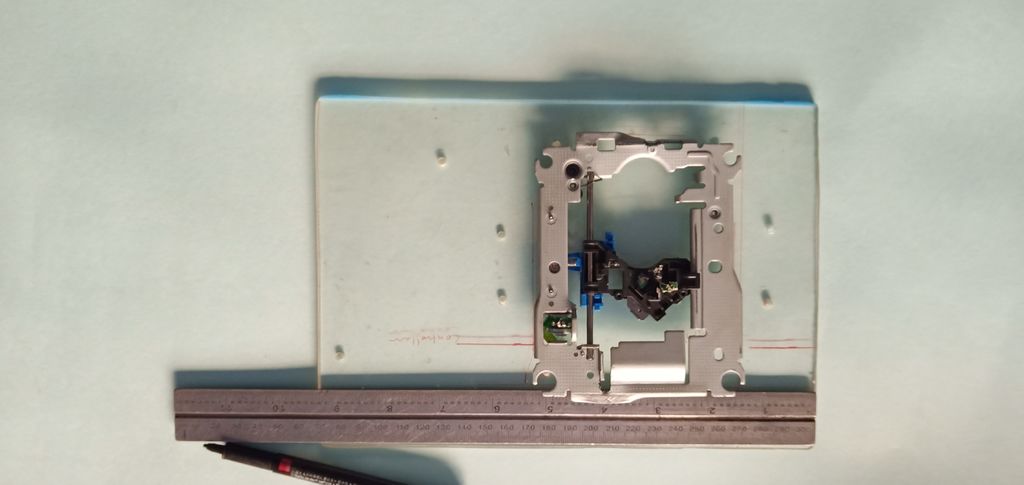


为了制作底座我使用的是4mm透明亚克力板。丙烯酸板的尺寸约为9英寸×6.6英寸。
现在我们必须创建我们的支架,用这个丙烯酸底座安装y轴。
从顶部留出1英寸,从侧面留下1.5英寸,并将步进机构放在底座上。现在标记相应的孔并钻孔,以便累积y轴步进机构。
这些测量并不重要。你可以根据自己的需要使用自己的空间。
此外,我还为此基座配备了4个硅橡胶垫,使基座在地面或任何位置都能保持牢固。
步骤4:识别步进线圈和接线。




DVD步进电机是双极步进电机,由两个线圈和四根电线组成。
我们需要识别线圈1和2的导线。
为了识别步进电机线圈,我们使用连续性测试仪,它将向我们展示两根导线的光线正在考虑中相同的线圈。
根据我们的grbl盾牌,有四个公头,其接线如下。
1A 1B 2B 2A
这表明1A&图1B所示的线圈是线圈1和2A和2A的一部分。 2B是第二个线圈的一部分。
注意 - 给出了每个过程的图像,因此请务必仔细查看它,这样可以更容易理解。
第5步:制作主雕刻平台。


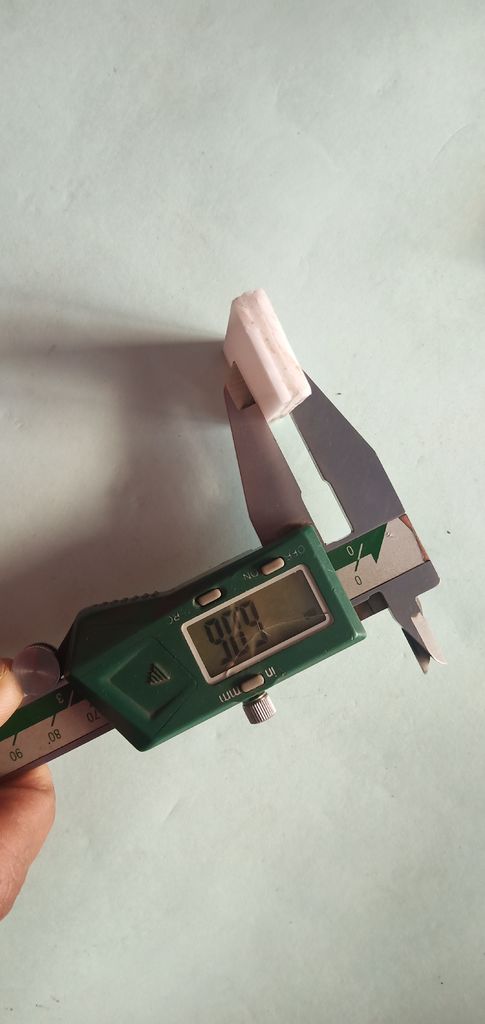












为了制作雕刻平台我要去使用一些尺寸为40mmx22.5mm的2mm薄亚克力板件。
我将使用与上述尺寸相似的树木,这样我就可以创造6毫米的高度。
现在使用一些热胶将这些碎片一个接一个地放在另一个上面。
一旦整个东西被粘上,它就需要连接到步进驱动机构的底座上。
这可确保步进驱动程序机制与我们将要安装的基础平台之间有足够的空间。
对于男人
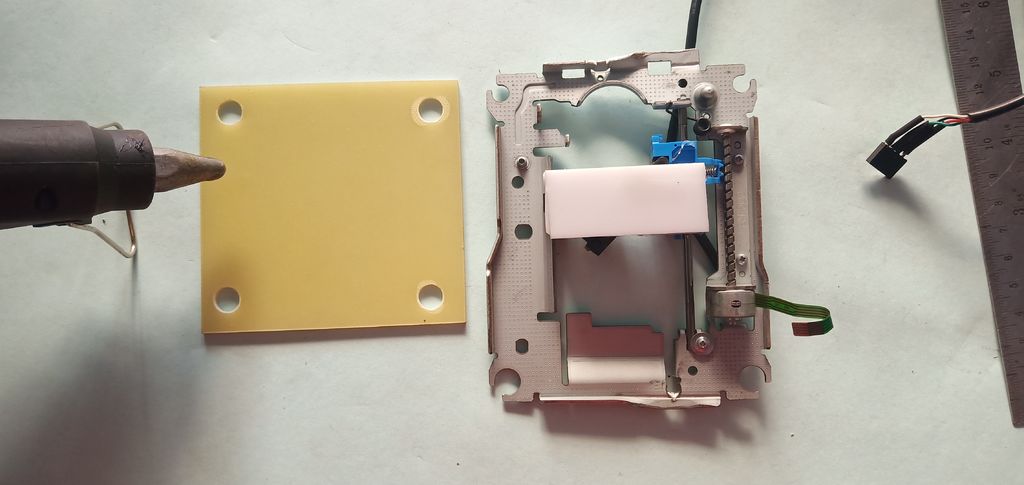
步骤6:为Y轴制作结构。







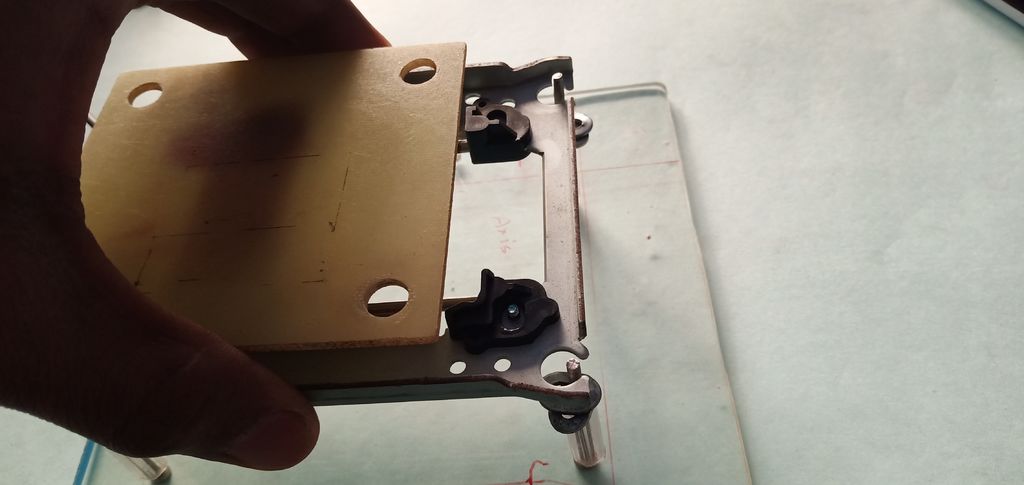
制作展位对于y轴并在机构和底座之间创造空间,我使用了四个垫片,这是通过使用刀片切割笔来制作的。我们需要的起搏器长度约为。 25毫米,足以在底座和机构之间留出足够的空间。
现在使用m3螺丝从丙烯酸基底下面插入它们,如图所示。
现在通过在机构上方和下方使用一些垫圈,使用螺母固定y轴步进机构
确保螺钉已正确固定
步骤7:为X轴制作结构。












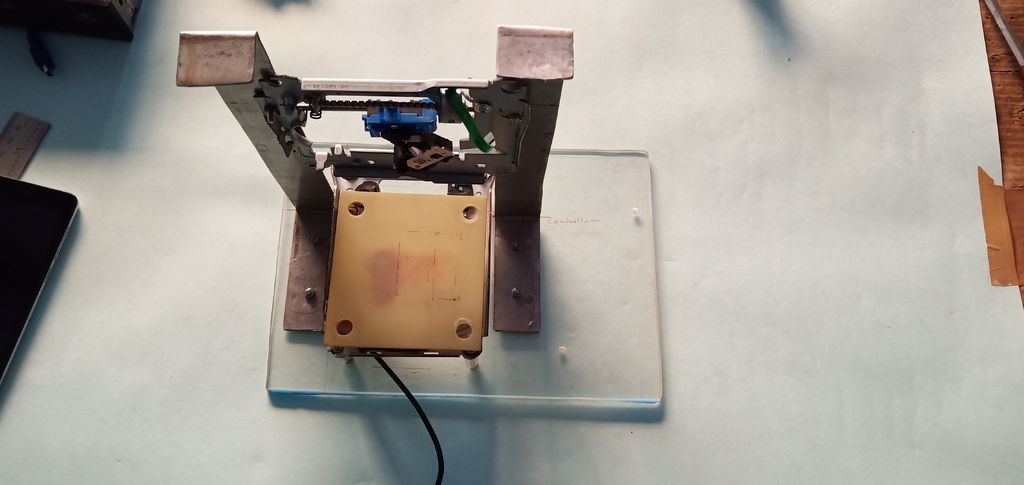


在makong学习y轴的基础之后,它现在转向制作X轴的主电源。
为了制作X轴的结构,我使用1.5毫米厚的金属板。材料是不锈钢。
你可以从废料中获得便宜货。
您也可以使用其他材料,如铝角等,它可以为您提供最好的资源。
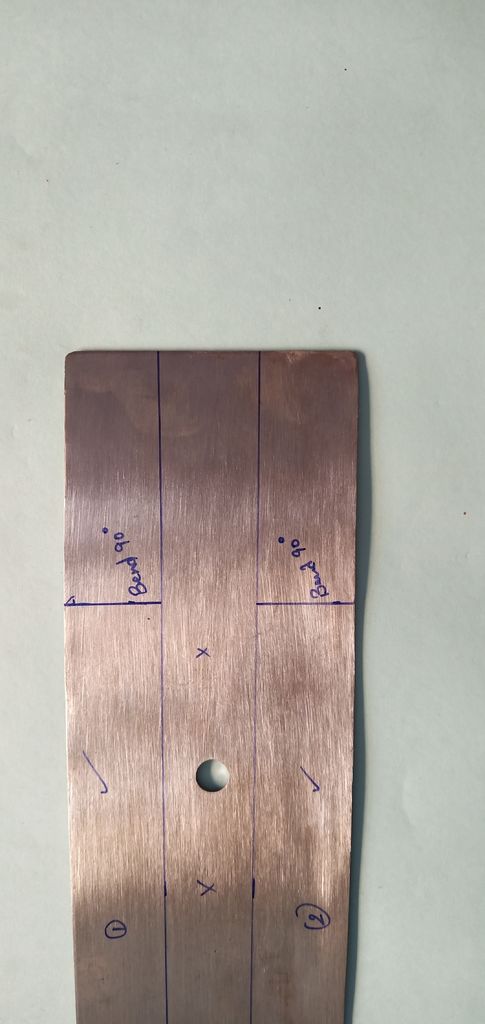
为了制作支架,我们将要求两块宽度为30毫米的钢板价格。因此,通过使用可存储的测量设备,我们将标记线。
在此之后,对于两个钢带,我们需要将其弯曲90°,距离为80 mm。
现在只需切割这些条带并将其弯曲90°
为了切割条带,您可能需要一些工具,因此您需要一个良好的工作室否则你可以从拥有工作室的人那里获得帮助。
切割后确保钢板侧面正确完成,确保不会伤到任何人。
对于弯曲条带,您可以用台钳抓住工件,使用锤子可以将其弯曲90°
只需检查弯曲是否正好是90°或不使用方形。
不正确的弯曲只会增加你的工作,所以这个过程应该是完美的。
步骤8:电子设备。









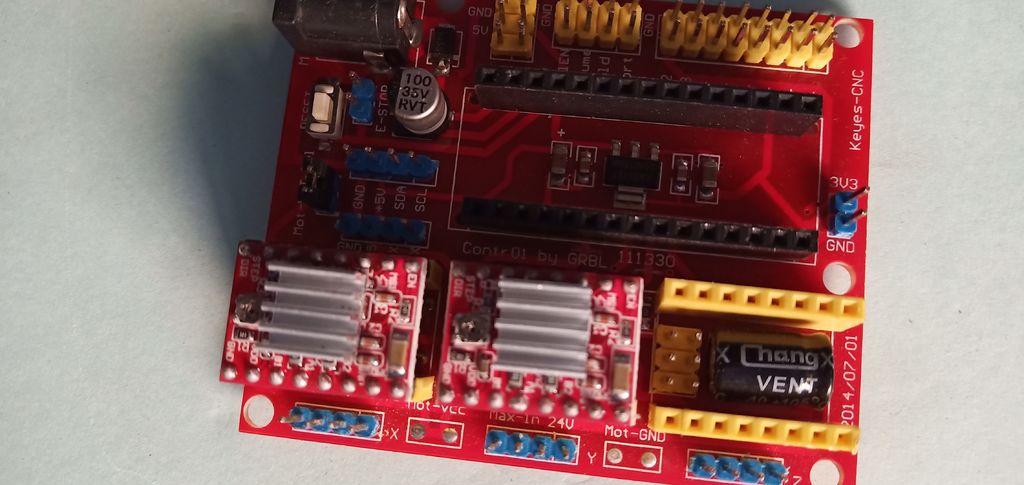



这是该项目最重要的部分。
为了运行机器,我们需要一个12v 2 - 2.5安培的电源。
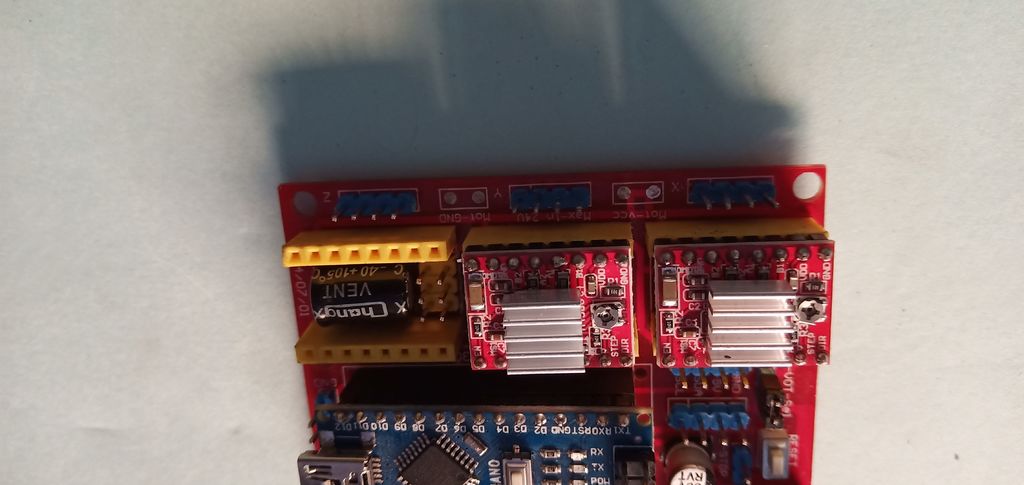
我们需要以正确的方式在CNC GRBL shield v4上设置Arduino Nano和2 A4988驱动程序,如图所示。
如果对齐不正确并且提供电源,可能会损坏步进驱动器或微控制器。
在驱动器和Nano正确对齐后,我们需要将其与电源和电池连接起来,并测试轴是否在相应的方向上移动。
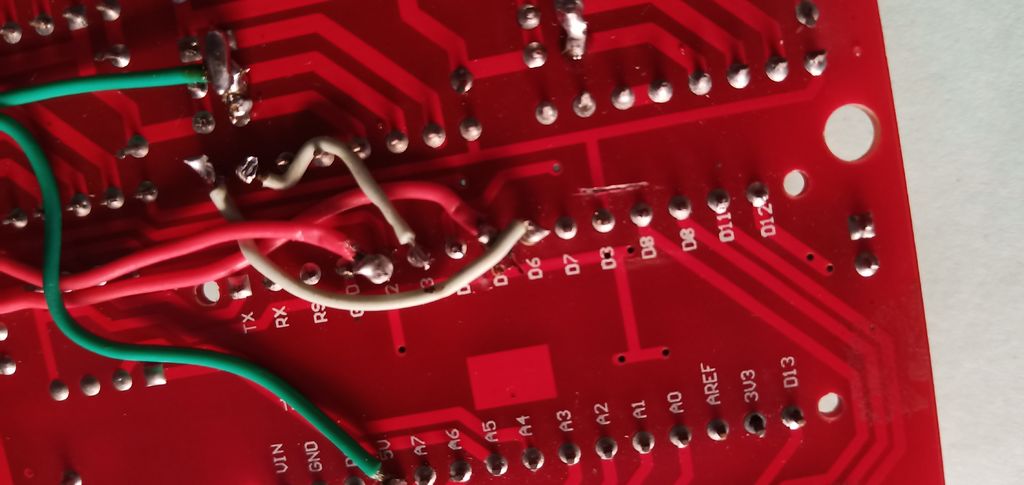
在我的情况下,当我尝试屏蔽时没有响应激光GRBL软件的命令。
然后我参考了我在互联网上找到的电路图检查了屏蔽上的连接。
注意 - 我的盾牌存在制造缺陷。为了纠正我和我的朋友盾做了同样的事情,发现他也有同样的问题。所以我再次分别焊接了X轴和Y轴的A4988的步进和方向引脚。
再次焊接步骤和方向引脚后,我能够完美地运行x和y轴。
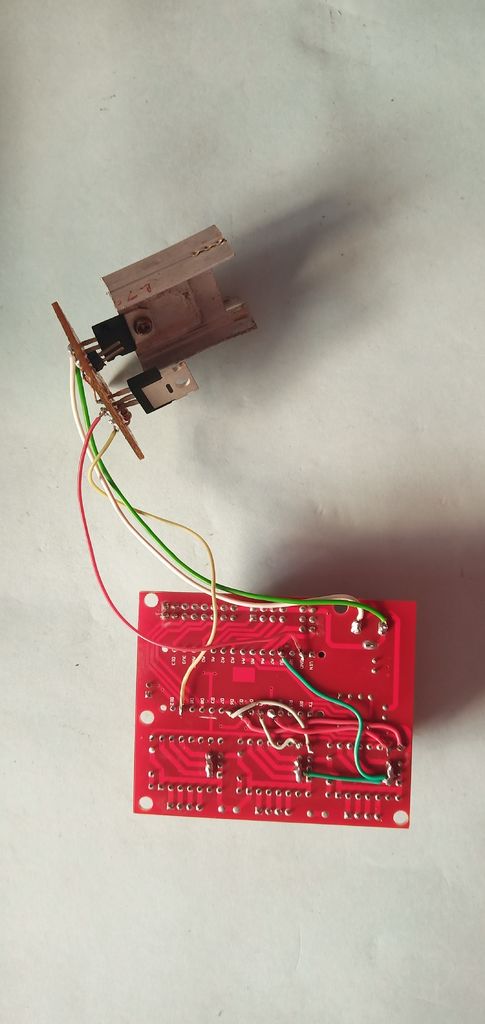
步骤9:激光切换电路原理图。

使用n通道mosfet Irfz44切换激光。
arduino Nano的数字引脚11连接到通过使用原理图中所示的电阻器来实现mosfet的栅极。
激光器工作电压为5伏,因此LM7805电压调节器用于提供电源。
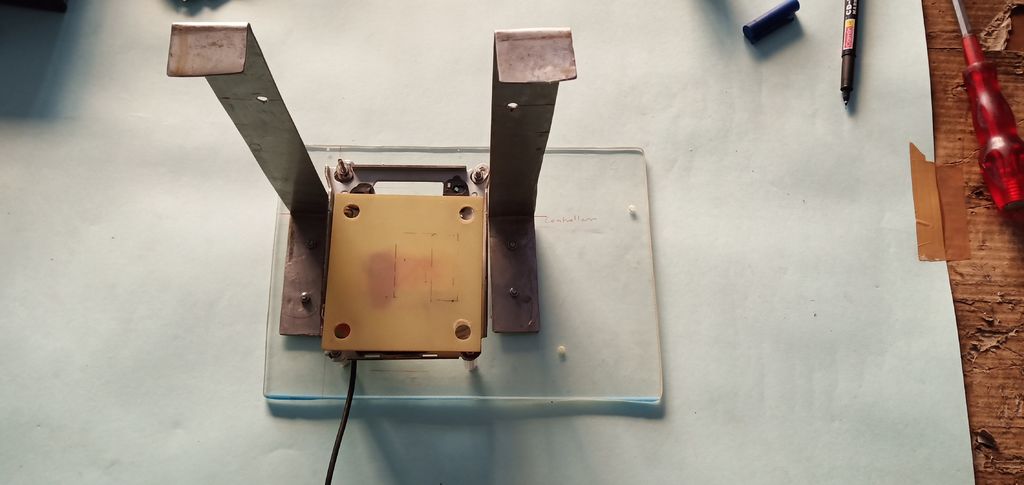
步骤10:向基地添加橡胶块。








为了使结构坚固,我们需要添加一些橡胶垫。
对于橡胶垫,我使用的是3.5毫米厚的硅橡胶片,并切割了四个直径为20毫米的圆形橡胶垫。
现在我们需要将这些橡胶垫连接到我们机器的底座上。为了将其粘附到底座上,我们将使用合成橡胶粘合剂FEVIBOND。
粘合剂应均匀地附着在两个表面上。涂上粘合剂后,将橡胶垫粘在底座上,让其干燥至少30分钟。
添加这些打击垫不是必需的,但是当机器放在粗糙的表面上时它会有所帮助。
这也可以保护丙烯酸基底免受划伤。
步骤11:步进电机校准和步长/毫米计算。

校准涉及步进电机的任何机器都需要进行一些计算。这些计算对于不同的步进电机是不同的。
因此您需要计算步进电机。
步长/mm =步进/旋转*(a4988的微步进)
步数/转数= 360/步进角度
对于我的步进电机,步数/转= 192
因此,步长/mm = 192 * 1/16 = 12步数/mm。
现在可以在激光grbl软件的grbl设置中添加此值。
步骤12:上传GRBL库和设置Up Laser GRBL。





上传到ARDUINO -
为了让这台机器运行,我们需要将grbl库上传到Arduino。
下载后需要解压缩文件。
解压后需要将文件夹放在以下位置 - 程序文件 - 》 Arduino-》库。将其粘贴到此位置。
现在打开Arduino ide并连接Arduino nano并选择正确的端口。现在包括grbl库并将其上传到Arduino。
设置LASERGRBL软件 -
打开LASERGRBL软件并将Arduino连接到电脑。
确保选择正确的波特率11500.
现在为电路提供12v 2.5安培电压。给电源后,两个步进电机都应锁定,不应该是空闲的。
现在点击“连接”按钮。
现在单击文件》打开文件》选择要雕刻的文件》单击确定。
现在您可以根据需要设置图像。在我的情况下,我使用矢量化图像并且不使用任何填充。
步骤13:将激光聚焦并开始雕刻。

现在我们需要使用一些热胶将激光安装在x轴上。
现在我们需要在我们之前创建的y平台上保留激光下的工件。
现在我们慢慢地尝试旋转激光的镜头并尝试使其成为更加聚焦的光束。
确保激光束的点应尽可能小。
一旦激光束聚焦到足以燃烧工件,你应该能够看到一些烟雾,确保工件已开始燃烧。
如果您不确定,我已上传了如何执行此操作的视频。
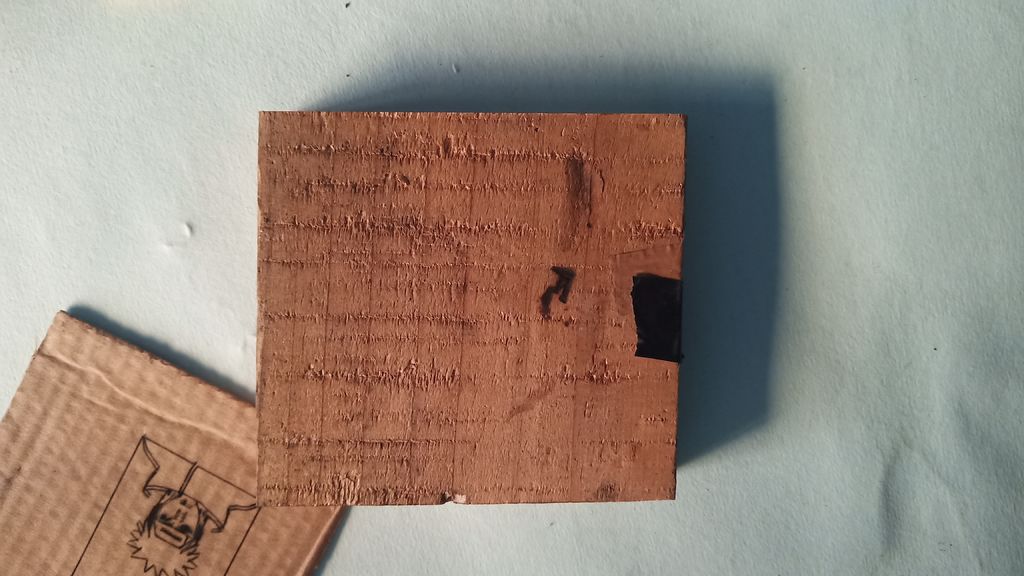
一旦完成这一步,我们终于开始雕刻我们想要的任何东西。
第一次雕刻我使用的是一些简单几何形状的图像,这些图像将向我们展示机器的准确性。
经过一些雕刻和调整系统后,我终于得到了一些干净准确的结果。
第14步:可雕刻的材料。


纸板。
硬板。
MDF。
Wood。
较弱的塑料。
可以切割的材料。
纸张。
乙烯基贴纸。
- 相关推荐
- 热点推荐
- 激光雕刻机
-
带激光雕刻机的二合一数控雕刻机2023-07-03 1079
-
DiY迷你激光雕刻机2023-06-26 2409
-
3D打印mini激光雕刻机2022-06-01 1011
-
国外牛人光驱激光雕刻机2020-04-05 4962
-
DIY自制激光雕刻机教程2020-04-04 10010
-
3D打印激光雕刻机DIY图解2019-08-30 17407
-
激光雕刻机和激光打标机的区别2019-08-29 21665
-
迷你数控激光雕刻机DIY图解2019-08-23 15072
-
diy激光雕刻机2017-02-07 2819
-
自制激光雕刻机2016-06-06 2195
-
激光雕刻机的加减速控制2016-05-03 994
-
一台低成本的激光雕刻机DIY制作2015-11-17 2333
全部0条评论

快来发表一下你的评论吧 !
