

如何在单片机上实现卡尔曼滤波详细计算方法和程序概述
电子说
描述
程序十分简洁易懂,而且使用效果不错,分享
#ifndef _KALMAN_H_
#define _KALMAN_H_
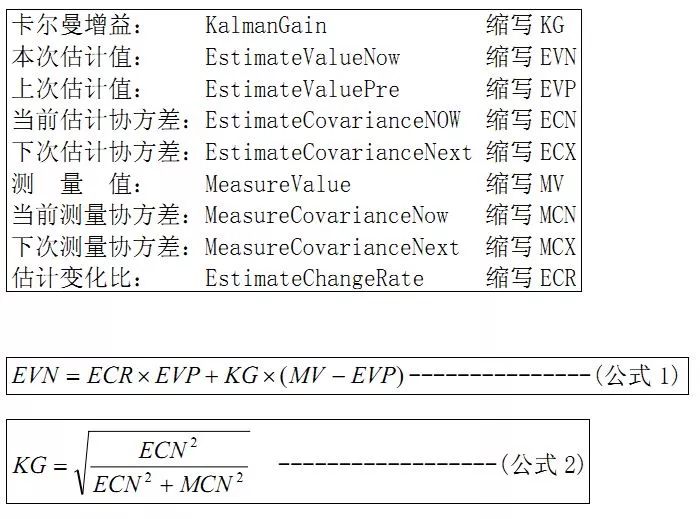
extern KalmanGain;// 卡尔曼增益
extern EstimateCovariance;//估计协方差
extern MeasureCovariance;//测量协方差
extern EstimateValue;//估计值
extern void KalmanFilterInit(void);
extern KalmanFilter( Measure);
#endif
#include "config.h"
#include "math.h"
KalmanGain;// 卡尔曼增益
EstimateCovariance;//估计协方差
MeasureCovariance;//测量协方差
EstimateValue;//估计值
void KalmanFilterInit(void);
extern float KalmanFilter(float Measure);
void KalmanFilterInit(void)
{
EstimateValue=0;
EstimateCovariance=0.1;
MeasureCovariance=0.02;
}
KalmanFilter( Measure)
{
//计算卡尔曼增益
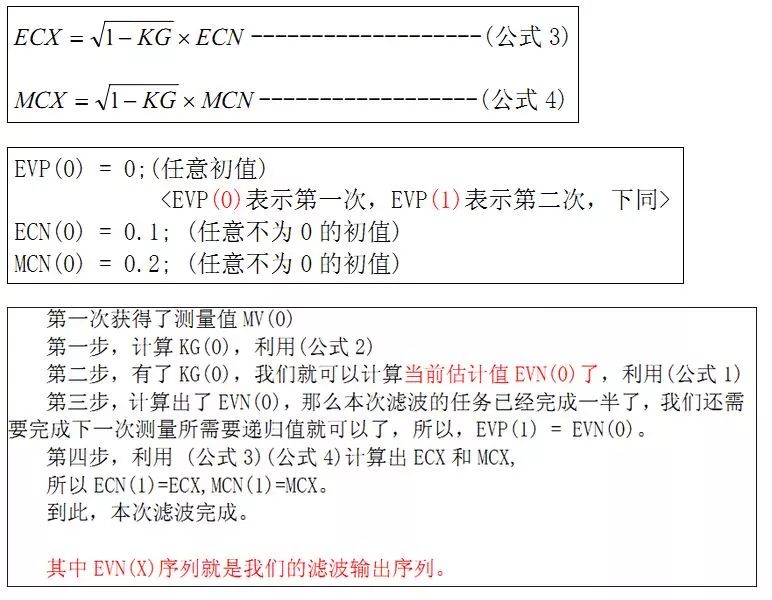
KalmanGain=EstimateCovariance*sqrt(1/(EstimateCovariance*EstimateCovariance+MeasureCovariance*MeasureCovariance));
//计算本次滤波估计值
EstimateValue=EstimateValue+KalmanGain*(Measure-EstimateValue);
//更新估计协方差
EstimateCovariance=sqrt(1-KalmanGain)*EstimateCovariance;
//更新测量方差
MeasureCovariance=sqrt(1-KalmanGain)*MeasureCovariance;
//返回估计值
return EstimateValue;
}
-
卡尔曼滤波家族2024-01-14 2968
-
什么是卡尔曼滤波?卡尔曼滤波的作用是什么2023-08-08 9903
-
浅析卡尔曼滤波2023-06-14 3417
-
卡尔曼滤波的原理及如何实现2020-06-01 1488
-
MCS51单片机程序设计时堆栈的计算方法解析2019-11-14 4882
-
使用51单片机实现MPU6050的卡尔曼滤波算法代码免费下载2019-08-20 2166
-
卡尔曼滤波在单片机上的使用资料和程序详细说明2019-07-10 1656
-
一文看懂mpu6050卡尔曼滤波程序2018-03-09 76546
-
卡尔曼滤波器参数分析与应用方法研究2016-06-21 976
-
卡尔曼滤波器原理简介2015-12-15 1134
-
教你在单片机上套公式实现卡尔曼滤波器2015-05-22 40338
-
matlab卡尔曼滤波程序2010-02-08 662
-
卡尔曼滤波器原理2008-07-14 1455
全部0条评论

快来发表一下你的评论吧 !
